Automation and Remote Control ( IF 0.7 ) Pub Date : 2024-02-25 , DOI: 10.1134/s0005117923100090 V. Yu. Rutkovskii , V. M. Glumov
|
Abstract
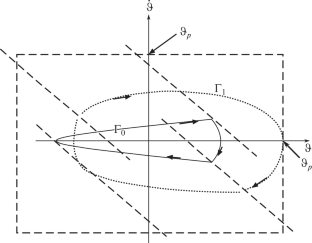
The control modes of a free-flying space manipulation robot during the transportation and installation of a building element on a large space structure are considered. It is proposed to save the working fluid of the gas-jet engines of the robot body when moving along the trajectory by using the mobility of a manipulator with electromechanical drives for the angular stabilization of the mechanical “robot–transported element” system. Conditions ensuring the stable motion of the manipulator in the working area when installing the element on the assembled structure are obtained. A stability domain is determined to select the initial configuration of the manipulator before installing the element and its admissible change during installation. The control algorithms are designed based on the principle of dynamic feedback systems.
中文翻译:
带有效载荷自由飞行空间操纵机器人的控制
摘要
考虑了在大空间结构上运输和安装建筑构件时自由飞行的空间操纵机器人的控制模式。建议利用带有机电驱动器的机械手的移动性来实现机械“机器人运输元件”系统的角度稳定,从而在沿着轨迹移动时节省机器人主体的气体喷射发动机的工作流体。获得了在装配结构上安装元件时保证机械手在工作区域稳定运动的条件。确定稳定域以在安装元件之前选择操纵器的初始配置及其在安装过程中允许的变化。控制算法是基于动态反馈系统的原理设计的。


























 京公网安备 11010802027423号
京公网安备 11010802027423号