GPS Solutions ( IF 4.9 ) Pub Date : 2024-02-26 , DOI: 10.1007/s10291-024-01624-8 Linyang Li , Zhenbang Xu , Zhen Jia , Luguang Lai , Yang Shen
|
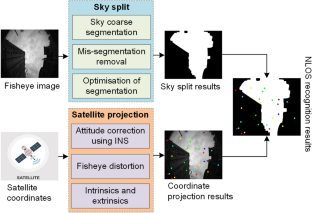
The massive number of global navigation satellite system (GNSS) users and frequent positioning demands in cities, as well as the complexity of urban scenarios, pose many challenges for the accuracy and reliability of precise positioning. Since urban environments tend to suffer from GNSS non-line-of-sight (NLOS) signal conditions, leading to large ranging errors, NLOS signal identification and processing are of great importance. Usually, a visual camera can reflect real occlusion, and machine learning is efficient and accurate in processing multiple types of features. Therefore, an algorithm is proposed that combines the advantages of both methods. First, NLOS labels are generated using a combination of an inertial navigation system (INS) and a fisheye camera, and a total of nine features, namely, the elevation angle as well as the signal-to-noise ratios (SNRs), SNR fluctuation magnitudes, pseudorange consistencies, and pseudorange multipath errors at two frequencies, are extracted. Then, to improve efficiency and avoid overfitting, the nine original features are aggregated into three common factors via factor analysis, and these three factors can be well interpreted. Finally, a NLOS signal identification model based on the random forest (RF) algorithm is designed. In addition, to improve the precise point positioning (PPP) performance, a weighting scheme based on the elevation angle and SNR is optimized in accordance with the probability of NLOS occurrence. In an experiment, the RF model is trained using on-board dynamic multi-GNSS dual-frequency data collected by a low-cost UBLOX F9P receiver in Wuhan, and then validation is performed using data collected in Wuhan and Zhengzhou. The experimental results show that compared with the gradient boosted decision tree (GBDT), support vector machine (SVM), naive Bayes (NB), and convolutional neural network (CNN) algorithms, the RF model shows superior performance. While achieving 87.5% and 72.5% accuracy on the local and remote test datasets, respectively, the RF model costs only 12.2 ms for LOS/NLOS classification per epoch. Moreover, through factor analysis, the computational efficiency is improved by 29.5% for all five algorithms. Additionally, the accuracy and stability of uncombined PPP are improved using the proposed weighting strategy.
中文翻译:
一种使用随机森林和视觉标签因子分析的高效 GNSS NLOS 信号识别和处理方法
城市中海量的全球导航卫星系统(GNSS)用户和频繁的定位需求以及城市场景的复杂性,对精密定位的准确性和可靠性提出了诸多挑战。由于城市环境容易受到 GNSS 非视距 (NLOS) 信号条件的影响,从而导致较大的测距误差,因此 NLOS 信号识别和处理非常重要。通常,视觉相机可以反映真实的遮挡,机器学习在处理多种类型的特征时高效且准确。因此,提出一种结合两种方法优点的算法。首先,结合惯性导航系统(INS)和鱼眼相机生成非视距标签,共有九个特征,即仰角以及信噪比(SNR)、SNR波动提取两个频率的幅度、伪距一致性和伪距多径误差。然后,为了提高效率并避免过度拟合,通过因子分析将九个原始特征聚合为三个公因子,并且这三个因子可以得到很好的解释。最后,设计了一种基于随机森林(RF)算法的非视距信号识别模型。此外,为了提高精密单点定位(PPP)性能,根据非视距发生概率优化了基于仰角和信噪比的加权方案。在实验中,使用武汉低成本UBLOX F9P接收器收集的机载动态多GNSS双频数据训练RF模型,然后使用武汉和郑州收集的数据进行验证。实验结果表明,与梯度提升决策树(GBDT)、支持向量机(SVM)、朴素贝叶斯(NB)和卷积神经网络(CNN)算法相比,RF模型表现出优越的性能。虽然 RF 模型在本地和远程测试数据集上分别实现了 87.5% 和 72.5% 的准确率,但每个 epoch 的 LOS/NLOS 分类仅花费 12.2 毫秒。此外,通过因子分析,五种算法的计算效率均提高了29.5%。此外,使用所提出的加权策略提高了未组合 PPP 的准确性和稳定性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号