International Journal of Intelligent Robotics and Applications Pub Date : 2024-02-27 , DOI: 10.1007/s41315-024-00321-6 Chong Yao , Changle Li , Yihan Shan , Xuehe Zhang , Leifeng Zhang , Jie Zhao
|
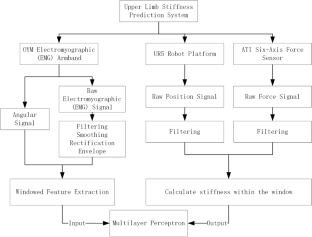
Predicting human stiffness, especially at the distal end of the human arm, holds significant potential for various applications. It facilitates the realization of humanoid stiffness regulation in robots, improves the adaptability and human-likeness of interactive robots, and addresses critical issues in human control of medical assistive robots. Recognizing that surface electromyographic (EMG) signals not only contain rich information but are also easy to collect and process, they serve as an optimal choice for predicting human stiffness. To establish a mapping relationship between surface EMG signals and stiffness information, we constructed a stiffness acquisition system to collect signals such as EMG, angular, force, and displacement signals. Additionally, considering the influence of different angles (configurations) of the human arm on the stiffness at the distal end, we researched a stiffness prediction model for the distal end of the human arm using a multilayer perceptron. Experimental results demonstrate that our proposed stiffness prediction model, utilizing EMG information provided by the EMG armband along with angular information, can predict the stiffness at the distal end of the human arm in various scenarios. This provides ample reference for achieving humanoid stiffness regulation in medical assistive robots.
中文翻译:
基于刚度预测的医疗辅助机器人刚度自适应控制研究
预测人体硬度,尤其是人体手臂远端的硬度,在各种应用中具有巨大的潜力。它有助于实现机器人的仿人刚度调节,提高交互式机器人的适应性和拟人性,解决医疗辅助机器人人类控制的关键问题。认识到表面肌电 (EMG) 信号不仅包含丰富的信息,而且易于收集和处理,它们是预测人体僵硬度的最佳选择。为了建立表面肌电信号与刚度信息之间的映射关系,我们构建了刚度采集系统来采集肌电、角度、力和位移等信号。此外,考虑到人体手臂不同角度(配置)对远端刚度的影响,我们研究了使用多层感知器的人体手臂远端刚度预测模型。实验结果表明,我们提出的刚度预测模型利用 EMG 臂带提供的 EMG 信息以及角度信息,可以预测各种场景下人体手臂远端的刚度。这为医疗辅助机器人实现仿人刚度调节提供了充分的参考。


























 京公网安备 11010802027423号
京公网安备 11010802027423号