当前位置:
X-MOL 学术
›
Digit. Signal Process.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Deep-feature-based asymmetrical background-aware correlation filter for object tracking
Digital Signal Processing ( IF 2.9 ) Pub Date : 2024-02-27 , DOI: 10.1016/j.dsp.2024.104446 Yingpin Chen , Huanyu Wu , Zhaojun Deng , Jun Zhang , Hui Wang , Lingzhi Wang , Wentong Huang
Digital Signal Processing ( IF 2.9 ) Pub Date : 2024-02-27 , DOI: 10.1016/j.dsp.2024.104446 Yingpin Chen , Huanyu Wu , Zhaojun Deng , Jun Zhang , Hui Wang , Lingzhi Wang , Wentong Huang
|
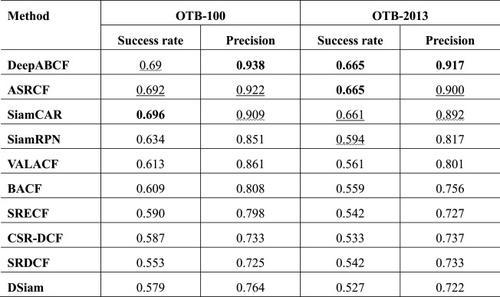
Correlation filter-based video object-tracking algorithms have gained widespread attention due to their efficiency and excellent tracking performance. However, traditional correlation filtering tracking algorithms possess several limitations. (1) They extract image features only by using rule sampling, which ignores the shape information of the target, resulting in insufficient discriminative power of the features. (2) They focus only on the difference between the background and the object, ignoring the effects of more challenging intra-class interference. (3) They do not further evaluate the reliability of the optimal candidate samples, resulting in easy failure in occlusion scenarios. This paper proposes an asymmetric background-aware correlation filter method for object tracking with deep features to solve the above limitations. First, an asymmetrical background-aware sampling method based on the shape information of the object is proposed. This sampling method significantly differs from the symmetrical sampling method in the traditional correlation filter framework. By exploring the shape information of the object, improving the otherness between the background and object samples is easy, thus suppressing the intra-class interferences. Second, deep neural networks are introduced in the correlation filter framework to extract the deep object features and a spatio-temporal regularization factor is adaptively assigned to suppress the boundary effects, intra-class distractors and aberrance between frames. Finally, a multi-modal object pool is constructed to evaluate the optimal candidate sample in each frame. This template pool fully exploits object diversity and solves the tracking drift and failure caused by invalid appearance changes in scenes such as occlusion and vigorous motion scenarios. To validate the effectiveness of the proposed method, it was compared with the state-of-the-art methods on public datasets. The experimental results show that the tracking performance of the proposed method is competitive.
中文翻译:

用于对象跟踪的基于深度特征的非对称背景感知相关滤波器
基于相关滤波器的视频目标跟踪算法因其高效和优异的跟踪性能而受到广泛关注。然而,传统的相关滤波跟踪算法具有一些局限性。 (1)仅利用规则采样来提取图像特征,忽略了目标的形状信息,导致特征的判别力不足。 (2)他们只关注背景和物体之间的差异,忽略了更具挑战性的类内干扰的影响。 (3)他们没有进一步评估最优候选样本的可靠性,导致在遮挡场景下容易失败。本文提出了一种用于具有深层特征的目标跟踪的非对称背景感知相关滤波器方法来解决上述局限性。首先,提出了一种基于物体形状信息的非对称背景感知采样方法。这种采样方法与传统相关滤波器框架中的对称采样方法有很大不同。通过探索目标的形状信息,可以很容易地改善背景和目标样本之间的差异性,从而抑制类内干扰。其次,在相关滤波器框架中引入深度神经网络来提取深层对象特征,并自适应分配时空正则化因子来抑制边界效应、类内干扰和帧间畸变。最后,构建多模态对象池来评估每帧中的最佳候选样本。该模板池充分利用了对象多样性,解决了遮挡、剧烈运动场景等场景中因无效外观变化而导致的跟踪漂移和失败。为了验证所提出方法的有效性,将其与公共数据集上最先进的方法进行了比较。实验结果表明,该方法的跟踪性能具有竞争力。
更新日期:2024-02-27
中文翻译:
用于对象跟踪的基于深度特征的非对称背景感知相关滤波器
基于相关滤波器的视频目标跟踪算法因其高效和优异的跟踪性能而受到广泛关注。然而,传统的相关滤波跟踪算法具有一些局限性。 (1)仅利用规则采样来提取图像特征,忽略了目标的形状信息,导致特征的判别力不足。 (2)他们只关注背景和物体之间的差异,忽略了更具挑战性的类内干扰的影响。 (3)他们没有进一步评估最优候选样本的可靠性,导致在遮挡场景下容易失败。本文提出了一种用于具有深层特征的目标跟踪的非对称背景感知相关滤波器方法来解决上述局限性。首先,提出了一种基于物体形状信息的非对称背景感知采样方法。这种采样方法与传统相关滤波器框架中的对称采样方法有很大不同。通过探索目标的形状信息,可以很容易地改善背景和目标样本之间的差异性,从而抑制类内干扰。其次,在相关滤波器框架中引入深度神经网络来提取深层对象特征,并自适应分配时空正则化因子来抑制边界效应、类内干扰和帧间畸变。最后,构建多模态对象池来评估每帧中的最佳候选样本。该模板池充分利用了对象多样性,解决了遮挡、剧烈运动场景等场景中因无效外观变化而导致的跟踪漂移和失败。为了验证所提出方法的有效性,将其与公共数据集上最先进的方法进行了比较。实验结果表明,该方法的跟踪性能具有竞争力。


























 京公网安备 11010802027423号
京公网安备 11010802027423号