当前位置:
X-MOL 学术
›
Control Eng. Pract.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Control design for thrust generators with application to wind turbine wave-tank testing: A sliding-mode control approach with Euler backward time-discretization
Control Engineering Practice ( IF 4.9 ) Pub Date : 2024-02-26 , DOI: 10.1016/j.conengprac.2024.105894 Mohammad Rasool Mojallizadeh , Félicien Bonnefoy , Vincent Leroy , Franck Plestan , Sylvain Delacroix , Jérémy Ohana , Benjamin Bouscasse
Control Engineering Practice ( IF 4.9 ) Pub Date : 2024-02-26 , DOI: 10.1016/j.conengprac.2024.105894 Mohammad Rasool Mojallizadeh , Félicien Bonnefoy , Vincent Leroy , Franck Plestan , Sylvain Delacroix , Jérémy Ohana , Benjamin Bouscasse
|
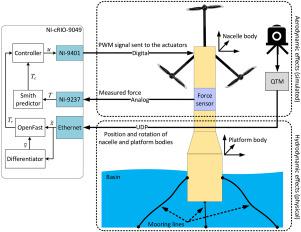
The control design for a propeller-based thrust generator used in a wind turbine testing platform is studied in this work. A mathematical model has been developed for the system including the motors and propeller. Subsequently, a continuous-time sliding-mode controller is designed based on the developed model and its stability and robustness have been addressed. An Euler backward time discretization method has been developed for the continuous-time sliding-mode controller to achieve a chattering-free implementation. The properties of the sliding-mode controller under the developed time discretization method , finite-time convergence, and gain insensitivity have been studied analytically. In order to evaluate the developed sliding-mode control law under the discretization method, three known control strategies, , gain-scheduling proportional-integral control, fuzzy control, and feedforward compensator strategies have been designed for the system. Some remarks are also given for the differentiator selection used to estimate the velocity. The experiments under different scenarios are then conducted and the results corresponding to all four controllers are provided along with a comparative analysis to identify the properties of each control configuration.
中文翻译:

应用于风力涡轮机波浪池测试的推力发生器控制设计:欧拉后向时间离散滑模控制方法
本文研究了风力发电机测试平台中使用的螺旋桨推力发生器的控制设计。已经为包括电机和螺旋桨在内的系统开发了数学模型。随后,基于所开发的模型设计了连续时间滑模控制器,并解决了其稳定性和鲁棒性问题。为连续时间滑模控制器开发了一种欧拉后向时间离散方法,以实现无抖振的实现。分析研究了滑模控制器在时间离散化方法下的特性、有限时间收敛性和增益不敏感性。为了评估离散化方法下开发的滑模控制律,为系统设计了三种已知的控制策略:增益调度比例积分控制、模糊控制和前馈补偿器策略。对于用于估计速度的微分器选择也给出了一些注释。然后进行不同场景下的实验,并提供与所有四个控制器相对应的结果以及比较分析,以确定每个控制配置的属性。
更新日期:2024-02-26
中文翻译:
应用于风力涡轮机波浪池测试的推力发生器控制设计:欧拉后向时间离散滑模控制方法
本文研究了风力发电机测试平台中使用的螺旋桨推力发生器的控制设计。已经为包括电机和螺旋桨在内的系统开发了数学模型。随后,基于所开发的模型设计了连续时间滑模控制器,并解决了其稳定性和鲁棒性问题。为连续时间滑模控制器开发了一种欧拉后向时间离散方法,以实现无抖振的实现。分析研究了滑模控制器在时间离散化方法下的特性、有限时间收敛性和增益不敏感性。为了评估离散化方法下开发的滑模控制律,为系统设计了三种已知的控制策略:增益调度比例积分控制、模糊控制和前馈补偿器策略。对于用于估计速度的微分器选择也给出了一些注释。然后进行不同场景下的实验,并提供与所有四个控制器相对应的结果以及比较分析,以确定每个控制配置的属性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号