Biomechanics and Modeling in Mechanobiology ( IF 3.5 ) Pub Date : 2024-03-09 , DOI: 10.1007/s10237-024-01825-7 Mohammad Fazle Rabbi , Giorgio Davico , David G. Lloyd , Christopher P. Carty , Laura E. Diamond , Claudio Pizzolato
|
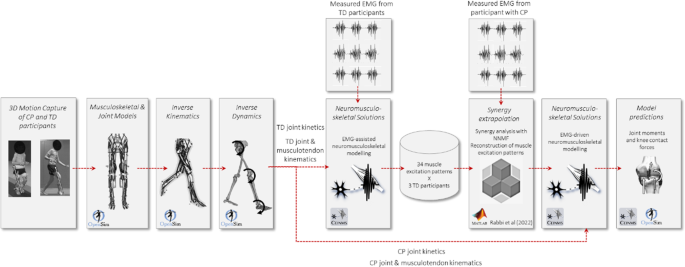
Cerebral palsy (CP) includes a group of neurological conditions caused by damage to the developing brain, resulting in maladaptive alterations of muscle coordination and movement. Estimates of joint moments and contact forces during locomotion are important to establish the trajectory of disease progression and plan appropriate surgical interventions in children with CP. Joint moments and contact forces can be estimated using electromyogram (EMG)-informed neuromusculoskeletal models, but a reduced number of EMG sensors would facilitate translation of these computational methods to clinics. This study developed and evaluated a muscle synergy-informed neuromusculoskeletal modelling approach using EMG recordings from three to four muscles to estimate joint moments and knee contact forces of children with CP and typically developing (TD) children during walking. Using only three to four experimental EMG sensors attached to a single leg and leveraging an EMG database of walking data of TD children, the synergy-informed approach estimated total knee contact forces comparable to those estimated by EMG-assisted approaches that used 13 EMG sensors (children with CP, n = 3, R2 = 0.95 ± 0.01, RMSE = 0.40 ± 0.14 BW; TD controls, n = 3, R2 = 0.93 ± 0.07, RMSE = 0.19 ± 0.05 BW). The proposed synergy-informed neuromusculoskeletal modelling approach could enable rapid evaluation of joint biomechanics in children with unimpaired and impaired motor control within a clinical environment.
中文翻译:
基于肌肉协同的神经肌肉骨骼模型来估计脑瘫儿童的膝关节接触力
脑瘫 (CP) 包括一组由发育中的大脑受损引起的神经系统疾病,导致肌肉协调和运动的适应不良改变。运动过程中关节力矩和接触力的估计对于确定脑瘫儿童的疾病进展轨迹和计划适当的手术干预措施非常重要。关节力矩和接触力可以使用肌电图(EMG)通知的神经肌肉骨骼模型来估计,但肌电图传感器数量的减少将有助于将这些计算方法转化为临床。这项研究开发并评估了一种基于肌肉协同的神经肌肉骨骼建模方法,使用三到四块肌肉的肌电图记录来估计 CP 儿童和典型发育 (TD) 儿童在行走过程中的关节力矩和膝盖接触力。仅使用连接到单腿的三到四个实验性 EMG 传感器并利用 TD 儿童步行数据的 EMG 数据库,协同信息方法估计的总膝关节接触力与使用 13 个 EMG 传感器的 EMG 辅助方法估计的结果相当。 CP 儿童,n = 3,R 2 = 0.95 ± 0.01,RMSE = 0.40 ± 0.14 BW;TD 对照,n = 3,R 2 = 0.93 ± 0.07,RMSE = 0.19 ± 0.05 BW)。所提出的基于协同的神经肌肉骨骼建模方法可以在临床环境中快速评估运动控制未受损和受损儿童的关节生物力学。


























 京公网安备 11010802027423号
京公网安备 11010802027423号