当前位置:
X-MOL 学术
›
Int. J. Appl. Earth Obs. Geoinf.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
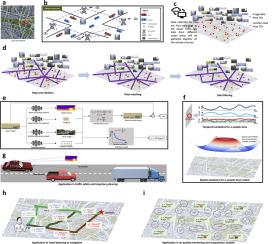
Self-supervised multi-task learning framework for safety and health-oriented road environment surveillance based on connected vehicle visual perception
International Journal of Applied Earth Observation and Geoinformation ( IF 7.5 ) Pub Date : 2024-03-06 , DOI: 10.1016/j.jag.2024.103753 Shaocheng Jia , Wei Yao
International Journal of Applied Earth Observation and Geoinformation ( IF 7.5 ) Pub Date : 2024-03-06 , DOI: 10.1016/j.jag.2024.103753 Shaocheng Jia , Wei Yao
|
Cutting-edge connected vehicle (CV) technologies have drawn much attention in recent years. The real-time traffic data captured by a CV can be shared with other CVs and data centers so as to open new possibilities for solving diverse transportation problems. The trajectory data of CVs have been well-studied and widely used. However, image data captured by onboard cameras in a connected environment, as being a kind of fundamental data source, are not sufficiently investigated, especially for safety and health-oriented visual perception. In this paper, a bidirectional process of image synthesis and decomposition (BPISD) approach is proposed, and thus a novel self-supervised multi-task learning framework, to simultaneously estimate depth map, atmospheric visibility, airlight, and PM mass concentration, in which depth map and visibility are considered highly associated with traffic safety, while airlight and PM mass concentration are directly correlated with human health. Both the training and testing phases of the proposed system solely require a single image as input. Due to the innovative training pipeline, the depth estimation network can automatically manage various levels of visibility conditions and overcome diverse inherent problems in current image-synthesis-based self-supervised depth estimation, thereby generating high-quality depth maps even in low-visibility situations and further benefiting accurate estimations of visibility, airlight, and PM mass concentration. Extensive experiments on the original and synthesized data from the KITTI dataset and real-world data collected in Beijing demonstrate that the proposed method can (1) achieve performance comparable in self-supervised depth estimation as compared with other state-of-the-art methods when taking clear images as input; (2) predict vivid depth map for images contaminated by various levels of haze when the network trained with previous framework fails; and (3) accurately estimate visibility, airlight, and PM mass concentrations. Beneficial applications can be developed based on the presented work to contribute to high-precise and dynamic geoinformation reconstruction, transportation, meteorology, and smart city.
更新日期:2024-03-06


























 京公网安备 11010802027423号
京公网安备 11010802027423号