当前位置:
X-MOL 学术
›
IET Intell. Transp. Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Modelling autonomous vehicle parking: An agent-based simulation approach
IET Intelligent Transport Systems ( IF 2.7 ) Pub Date : 2024-03-12 , DOI: 10.1049/itr2.12506 Wenhao Li 1, 2 , Yewen Jia 1 , Yanjie Ji 1 , Phil Blythe 3 , Shuo Li 3
IET Intelligent Transport Systems ( IF 2.7 ) Pub Date : 2024-03-12 , DOI: 10.1049/itr2.12506 Wenhao Li 1, 2 , Yewen Jia 1 , Yanjie Ji 1 , Phil Blythe 3 , Shuo Li 3
Affiliation
|
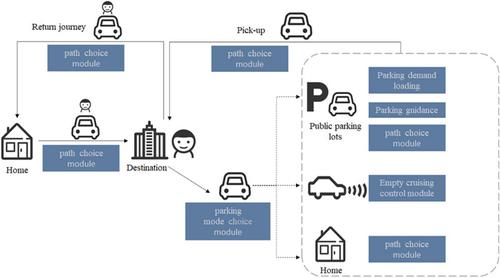
Autonomous vehicles (AVs) present a paradigm shift in addressing conventional parking challenges. Unlike human-driven vehicles, AVs can strategically park or cruise until summoned by users. Utilizing utility theory, the parking decision-making processes of AVs users are explored, taking into account constraints related to both cost and time. An agent-based simulation approach is adopted to construct an AV parking model, reflecting the complex dynamics of the parking decision process in the real world, where each user's choice has a ripple effect on traffic conditions, consequently affecting the feasible options for other users. The simulation experiments indicate that 11.50% of AVs gravitate towards parking lots near their destinations, while over 50% of AVs avoid public parking amenities altogether. This trend towards minimizing individual parking costs prompts AVs to undertake extended empty cruising, resulting in a significant increase of 48.18% in total vehicle mileage. Moreover, the pricing structure across various parking facilities and management dictates the parking preferences of AVs, establishing a nuanced trade-off between parking expenses and proximity for these vehicles.
中文翻译:

自动停车建模:基于代理的模拟方法
自动驾驶汽车(AV)在解决传统停车挑战方面带来了范式转变。与人类驾驶的车辆不同,自动驾驶汽车可以有策略地停车或巡航,直到用户召唤。利用效用理论,探索自动驾驶汽车用户的停车决策过程,同时考虑与成本和时间相关的约束。采用基于代理的仿真方法构建自动驾驶停车模型,反映现实世界中停车决策过程的复杂动态,每个用户的选择都会对交通状况产生连锁反应,从而影响其他用户的可行选择。模拟实验表明,11.50% 的自动驾驶汽车倾向于目的地附近的停车场,而超过 50% 的自动驾驶汽车完全避开公共停车设施。这种将个人停车成本降至最低的趋势促使自动驾驶汽车进行长时间的空载巡航,从而使车辆总里程显着增加了 48.18%。此外,各种停车设施和管理的定价结构决定了自动驾驶汽车的停车偏好,在停车费用和这些车辆的接近程度之间建立了微妙的权衡。
更新日期:2024-03-13
中文翻译:
自动停车建模:基于代理的模拟方法
自动驾驶汽车(AV)在解决传统停车挑战方面带来了范式转变。与人类驾驶的车辆不同,自动驾驶汽车可以有策略地停车或巡航,直到用户召唤。利用效用理论,探索自动驾驶汽车用户的停车决策过程,同时考虑与成本和时间相关的约束。采用基于代理的仿真方法构建自动驾驶停车模型,反映现实世界中停车决策过程的复杂动态,每个用户的选择都会对交通状况产生连锁反应,从而影响其他用户的可行选择。模拟实验表明,11.50% 的自动驾驶汽车倾向于目的地附近的停车场,而超过 50% 的自动驾驶汽车完全避开公共停车设施。这种将个人停车成本降至最低的趋势促使自动驾驶汽车进行长时间的空载巡航,从而使车辆总里程显着增加了 48.18%。此外,各种停车设施和管理的定价结构决定了自动驾驶汽车的停车偏好,在停车费用和这些车辆的接近程度之间建立了微妙的权衡。


























 京公网安备 11010802027423号
京公网安备 11010802027423号