International Journal of Intelligent Robotics and Applications Pub Date : 2024-03-11 , DOI: 10.1007/s41315-024-00326-1 Fengming Li , Dang Hou , Tianyu Fu , Jiexin Song , Wenbin He , Rui Song
|
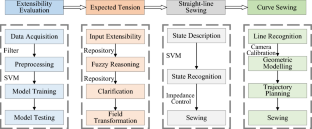
At present, most clothing sewing relies on manual labor, and robot sewing has become a trend. However, different clothing styles have various sewing requirements. This poses a challenge for robot sewing, and the key to solving this challenge lies in the planning of robot operation trajectories. Although the shapes of sewing components are diverse, we can decompose them into the most basic straight lines and curved edges. In order to solve the trajectory planning problem in robot sewing process, this paper divides the sewing task into two parts: straight line and curve, and proposes a new robot sewing method based on task process decomposition. Firstly, The robot complex sewing task is divided into two parts: straight line and curve. Based on the extensibility, the sewing tension is predicted, and the robot linear sewing based on impedance control is realized. At the same time, the trajectory planning is carried out on the basis of the line identification of the curved edge to realize the curve sewing. Finally, the robot complex stitch sewing under different curvatures is realized on the built physical experiment platform. It is verified that the effectiveness of the robot sewing method based on process modeling.
中文翻译:
基于工艺建模的机器人缝制方法研究
目前,大部分服装缝制依赖手工劳动,机器人缝制已成为趋势。然而,不同的服装款式有不同的缝制要求。这对机器人缝纫提出了挑战,而解决这一挑战的关键在于机器人运行轨迹的规划。虽然缝制部件的形状多种多样,但我们可以将它们分解为最基本的直线和曲线边缘。为了解决机器人缝纫过程中的轨迹规划问题,本文将缝纫任务分为直线和曲线两部分,提出一种基于任务过程分解的机器人缝纫新方法。首先,机器人复杂的缝纫任务分为直线和曲线两部分。基于延展性,预测缝纫张力,实现基于阻抗控制的机器人直线缝纫。同时,在曲线边缘线条识别的基础上进行轨迹规划,实现曲线缝纫。最后在搭建的物理实验平台上实现了机器人在不同曲率下的复杂线迹缝纫。验证了基于工艺建模的机器人缝制方法的有效性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号