当前位置:
X-MOL 学术
›
Robot. Comput.-Integr. Manuf.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
In-situ elastic calibration of robots: Minimally-invasive technology, cover-based pose search and aerospace case studies
Robotics and Computer-Integrated Manufacturing ( IF 10.4 ) Pub Date : 2024-03-16 , DOI: 10.1016/j.rcim.2024.102743 Bruno Monsarrat , Julien-Mathieu Audet , Yves Fortin , Gabriel Côté , Michael Vistein , Lars Brandt , Ahmad Sadek , Florian Krebs
Robotics and Computer-Integrated Manufacturing ( IF 10.4 ) Pub Date : 2024-03-16 , DOI: 10.1016/j.rcim.2024.102743 Bruno Monsarrat , Julien-Mathieu Audet , Yves Fortin , Gabriel Côté , Michael Vistein , Lars Brandt , Ahmad Sadek , Florian Krebs
|
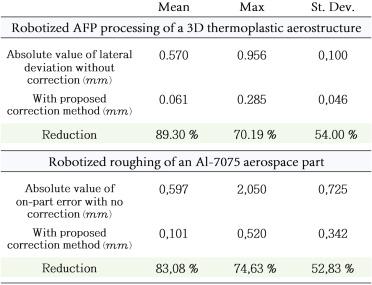
This paper presents a novel technology for the in-situ robot elastic calibration (IREC) in industrial settings. It was especially formulated for robots that are used for accuracy demanding processes involving an exchange of force between the robot and the processed part. The calibration method was developed to conciliate requirements of minimal invasiveness, for seamless deployment in industrial settings, together with a high degree of coherence with the spectrum of action of the robot in production. The method relies on the achievement of a set of controlled load cases exerted in tribologically resisted directions after the robot is engaged against a constraint in order to establish accurate force–displacement relationships. A minimal set of engagement poses is efficiently determined using a new pose search technique involving a metric cover-based approximation heuristics applied on the surface of the constraint. The calibration apparatus and method are presented through the lens of accuracy competency development charts (Codecs), the graphical outputs of a repeated cross-validation algorithm. This new monitoring tool allows visualizing how the accuracy of deviation under load prediction grows during the calibration as a function of the number and distribution of calibration poses, and how this growth is influenced by the complexity of the load cases and that of the elastic model. Two case studies are presented to highlight both the efficiency and generality of the proposed method and algorithms, first the robotized automated fiber placement (AFP) processing of a 3D thermoplastic aerostructure and subsequently the robotized machining of a representative primary aluminium aerospace part. In these applications, the mean deviations were reduced respectively by 89.30 % and 83.08 %, allowing the achievement of the desired process tolerances.
中文翻译:

机器人原位弹性校准:微创技术、基于掩体的位姿搜索和航空航天案例研究
本文提出了一种用于工业环境中原位机器人弹性校准(IREC)的新技术。它专为用于精度要求较高的工艺(涉及机器人与加工部件之间的力交换)的机器人而设计。开发校准方法是为了满足工业环境中无缝部署的最小侵入性要求,以及与生产中机器人的动作范围的高度一致性。该方法依赖于机器人与约束接合后在摩擦阻力方向上施加的一组受控负载情况的实现,以建立准确的力-位移关系。使用新的姿势搜索技术有效地确定最小的接合姿势集,该技术涉及应用于约束表面的基于度量覆盖的近似启发式方法。通过准确性能力发展图表(编解码器)、重复交叉验证算法的图形输出来呈现校准装置和方法。这种新的监控工具可以直观地显示校准过程中负载预测偏差的准确性如何随着校准姿势的数量和分布而增长,以及这种增长如何受到负载情况和弹性模型复杂性的影响。提出了两个案例研究,以强调所提出的方法和算法的效率和通用性,首先是 3D 热塑性航空结构的机器人自动纤维铺放 (AFP) 加工,然后是代表性初级铝航空航天零件的机器人加工。在这些应用中,平均偏差分别减少了 89.30% 和 83.08%,从而实现了所需的工艺公差。
更新日期:2024-03-16
中文翻译:
机器人原位弹性校准:微创技术、基于掩体的位姿搜索和航空航天案例研究
本文提出了一种用于工业环境中原位机器人弹性校准(IREC)的新技术。它专为用于精度要求较高的工艺(涉及机器人与加工部件之间的力交换)的机器人而设计。开发校准方法是为了满足工业环境中无缝部署的最小侵入性要求,以及与生产中机器人的动作范围的高度一致性。该方法依赖于机器人与约束接合后在摩擦阻力方向上施加的一组受控负载情况的实现,以建立准确的力-位移关系。使用新的姿势搜索技术有效地确定最小的接合姿势集,该技术涉及应用于约束表面的基于度量覆盖的近似启发式方法。通过准确性能力发展图表(编解码器)、重复交叉验证算法的图形输出来呈现校准装置和方法。这种新的监控工具可以直观地显示校准过程中负载预测偏差的准确性如何随着校准姿势的数量和分布而增长,以及这种增长如何受到负载情况和弹性模型复杂性的影响。提出了两个案例研究,以强调所提出的方法和算法的效率和通用性,首先是 3D 热塑性航空结构的机器人自动纤维铺放 (AFP) 加工,然后是代表性初级铝航空航天零件的机器人加工。在这些应用中,平均偏差分别减少了 89.30% 和 83.08%,从而实现了所需的工艺公差。


























 京公网安备 11010802027423号
京公网安备 11010802027423号