International Journal of Intelligent Robotics and Applications Pub Date : 2024-03-20 , DOI: 10.1007/s41315-024-00330-5 Sindhu Radhakrishnan , Wail Gueaieb
|
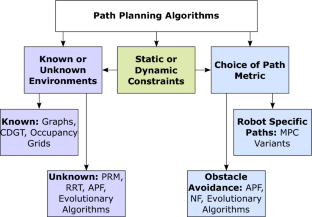
Autonomous robotics has permeated several industrial, research and consumer robotic applications, of which path planning is an important component. The path planning algorithm of choice is influenced by the application at hand and the history of algorithms used for such applications. The latter is dependent on an extensive conglomeration and classification of path planning literature, which is what this work focuses on. Specifically, we accomplish the following: typical classifications of path planning algorithms are provided. Such classifications rely on differences in knowledge of the environment (known/unknown), robot (model-specific/generic), and constraints (static/dynamic). This classification however, is not comprehensive. Thus, as a resolution, we propose a detailed taxonomy based on a fundamental parameter of the space, i.e. its ability to be characterized as a set of disjoint or connected points. We show that this taxonomy encompasses important attributes of path planning problems, such as connectivity and partitioning of spaces. Consequently, path planning spaces in robotics may be viewed as simply a set of points, or as manifolds. The former can further be divided into unpartitioned and partitioned spaces, of which the former uses variants of sampling algorithms, optimization algorithms, model predictive controls, and evolutionary algorithms, while the latter uses cell decomposition and graph traversal, and sampling-based optimization techniques.This article achieves the following two goals: The first is the introduction of an all-encompassing taxonomy of robotic path planning. The second is to streamline the migration of path planning work from disciplines such as mathematics and computer vision to robotics, into one comprehensive survey. Thus, the main contribution of this work is the review of works for static constraints that fall under the proposed taxonomy, i.e., specifically under topology and manifold-based methods. Additionally, further taxonomy is introduced for manifold-based path planning, based on incremental construction or one-step explicit parametrization of the space.
中文翻译:
基于拓扑和微分几何的机器人路径规划的最新综述——第一部分:静态约束下的规划
自主机器人技术已渗透到多种工业、研究和消费机器人应用中,路径规划是其中的重要组成部分。选择的路径规划算法受到当前应用程序以及用于此类应用程序的算法历史的影响。后者依赖于路径规划文献的广泛聚合和分类,这正是本工作的重点。具体来说,我们完成以下工作:提供路径规划算法的典型分类。这种分类依赖于环境(已知/未知)、机器人(特定模型/通用)和约束(静态/动态)知识的差异。然而,这种分类并不全面。因此,作为解决方案,我们提出了基于空间基本参数的详细分类法,即其被表征为一组不相交或连接点的能力。我们表明,这种分类法包含路径规划问题的重要属性,例如空间的连通性和分区。因此,机器人技术中的路径规划空间可以被简单地视为一组点或流形。前者又可以进一步分为未划分空间和划分空间,其中前者使用采样算法、优化算法、模型预测控制和进化算法的变体,而后者则使用单元分解和图遍历以及基于采样的优化技术。本文实现了以下两个目标:第一个是引入机器人路径规划的包罗万象的分类法。第二个目标是将路径规划工作从数学和计算机视觉等学科向机器人技术的迁移简化为一项综合调查。因此,这项工作的主要贡献是审查属于所提议的分类法的静态约束的工作,即特别是在拓扑和基于流形的方法下。此外,基于增量构造或空间的一步显式参数化,还为基于流形的路径规划引入了进一步的分类法。


























 京公网安备 11010802027423号
京公网安备 11010802027423号