当前位置:
X-MOL 学术
›
J. Am. Chem. Soc.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
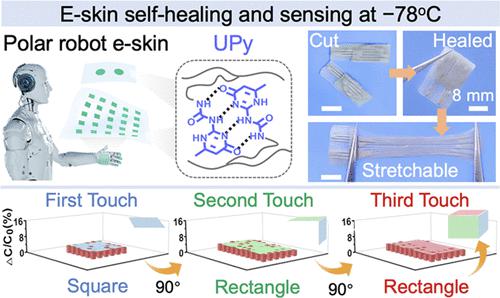
Highly Stretchable, Self-Healing, and Sensitive E-Skins at −78 °C for Polar Exploration
Journal of the American Chemical Society ( IF 15.0 ) Pub Date : 2024-03-22 , DOI: 10.1021/jacs.4c00541 Kai Yang 1 , Qingsi Li 1 , Shu Tian 1 , Jiancheng Wang 2 , Guangming Lu 3 , Hongshuang Guo 1 , Sijia Xu 1 , Lei Zhang 1, 4 , Jing Yang 1
Journal of the American Chemical Society ( IF 15.0 ) Pub Date : 2024-03-22 , DOI: 10.1021/jacs.4c00541 Kai Yang 1 , Qingsi Li 1 , Shu Tian 1 , Jiancheng Wang 2 , Guangming Lu 3 , Hongshuang Guo 1 , Sijia Xu 1 , Lei Zhang 1, 4 , Jing Yang 1
Affiliation
|
Ultralow temperature-tolerant electronic skins (e-skins) can endow polar robots with tactile feedback for exploring in extremely cold polar environments. However, it remains a challenge to develop e-skins that enable sensitive touch sensation and self-healing at ultralow temperatures. Herein, we describe the development of a sensitive robotic hand e-skin that can stretch, self-heal, and sense at temperatures as low as −78 °C. The elastomeric substrate of this e-skin is based on poly(dimethylsiloxane) supramolecular polymers and multistrength dynamic H-bonds, in particular with quadruple H-bonding motifs (UPy). The structure–performance relationship of the elastomer at ultralow temperatures is investigated. The results show that elastomers with side-chain UPy units exhibit higher stretchability (∼3257%) and self-healing efficiency compared to those with main-chain UPy units. This is attributed to the lower binding energy variation and lower potential well. Based on the elastomer with side-chain UPy and man-made electric ink, a sensitive robotic hand e-skin for usage at −78 °C is constructed to precisely sense the shape of objects and specific symbols, and its sensation can completely self-recover after being damaged. The findings of this study contribute to the concept of using robotic hands with e-skins in polar environments that make human involvement limited, dangerous, or impossible.
中文翻译:

用于极地探索的-78°C 高度可拉伸、自我修复和敏感的电子皮肤
耐超低温电子皮肤(e-skin)可以赋予极地机器人触觉反馈,以便在极冷的极地环境中进行探索。然而,开发能够在超低温下实现敏感触觉和自我修复的电子皮肤仍然是一个挑战。在此,我们描述了一种敏感的机器人手电子皮肤的开发,它可以在低至-78°C的温度下拉伸、自我修复和感知。这种电子皮肤的弹性体基底基于聚(二甲基硅氧烷)超分子聚合物和多强度动态氢键,特别是具有四重氢键基序(UPy)。研究了超低温下弹性体的结构-性能关系。结果表明,与具有主链 UPy 单元的弹性体相比,具有侧链 UPy 单元的弹性体表现出更高的拉伸性(~3257%)和自修复效率。这归因于较低的结合能变化和较低的势阱。基于侧链UPy弹性体和人造电子墨水,构建了一种在-78℃下使用的灵敏机械手电子皮肤,可以精确感知物体的形状和特定符号,其感觉可以完全自我感知。损坏后恢复。这项研究的结果促成了在极地环境中使用带有电子皮肤的机器人手的概念,这使得人类的参与受到限制、危险或不可能。
更新日期:2024-03-22
中文翻译:
用于极地探索的-78°C 高度可拉伸、自我修复和敏感的电子皮肤
耐超低温电子皮肤(e-skin)可以赋予极地机器人触觉反馈,以便在极冷的极地环境中进行探索。然而,开发能够在超低温下实现敏感触觉和自我修复的电子皮肤仍然是一个挑战。在此,我们描述了一种敏感的机器人手电子皮肤的开发,它可以在低至-78°C的温度下拉伸、自我修复和感知。这种电子皮肤的弹性体基底基于聚(二甲基硅氧烷)超分子聚合物和多强度动态氢键,特别是具有四重氢键基序(UPy)。研究了超低温下弹性体的结构-性能关系。结果表明,与具有主链 UPy 单元的弹性体相比,具有侧链 UPy 单元的弹性体表现出更高的拉伸性(~3257%)和自修复效率。这归因于较低的结合能变化和较低的势阱。基于侧链UPy弹性体和人造电子墨水,构建了一种在-78℃下使用的灵敏机械手电子皮肤,可以精确感知物体的形状和特定符号,其感觉可以完全自我感知。损坏后恢复。这项研究的结果促成了在极地环境中使用带有电子皮肤的机器人手的概念,这使得人类的参与受到限制、危险或不可能。


























 京公网安备 11010802027423号
京公网安备 11010802027423号