International Journal of Intelligent Robotics and Applications Pub Date : 2024-03-25 , DOI: 10.1007/s41315-024-00331-4 Sindhu Radhakrishnan , Wail Gueaieb
|
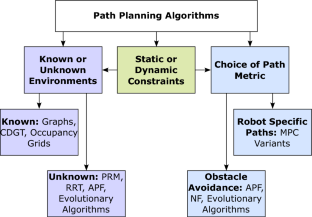
Path planning is an intrinsic component of autonomous robotics, be it industrial, research or consumer robotics. Such avenues experience constraints around which paths must be planned. While the choice of an appropriate algorithm is application-dependent, the starting point of an ideal path planning algorithm is the review of past work. Historically, algorithms were classified based on the three tenets of autonomous robotics which are the ability to avoid different constraints (static/dynamic), knowledge of the environment (known/unknown) and knowledge of the robot (general/model specific). This division in literature however, is not comprehensive, especially with respect to dynamics constraints. Therefore, to remedy this issue, we propose a new taxonomy, based on the fundamental tenet of characterizing space, i.e., as a set of distinct, unrelated points or as a set of points that share a relationship. We show that this taxonomy is effective in addressing important parameters of path planning such as connectivity and partitioning of spaces. Therefore, path planning spaces may now be viewed either as a set of points or, as a space with structure. The former relies heavily on robot models, since the mathematical structure of the environment is not considered. Thus, the approaches used are variants of optimization algorithms and specific variants of model-based methods that are tailored to counteract effects of dynamic constraints. The latter depicts spaces as points with inter-connecting relationships, such as surfaces or manifolds. These structures allow for unique characterizations of paths using homotopy-based methods. The goals of this work, viewed specifically in light with dynamic constraints, are therefore as follows: First, we propose an all-encompassing taxonomy for robotic path planning literature that considers an underlying structure of the space. Second, we provide a detailed accumulation of works that do focus on the characterization of paths in spaces formulated to show underlying structure. This work accomplishes the goals by doing the following: It highlights existing classifications of path planning literature, identifies gaps in common classifications, proposes a new taxonomy based on the mathematical nature of the path planning space (topological properties), and provides an extensive conglomeration of literature that is encompassed by this new proposed taxonomy.
中文翻译:
基于拓扑和微分几何的机器人路径规划的最新综述——第二部分:动态约束下的规划
路径规划是自主机器人技术的固有组成部分,无论是工业机器人、研究机器人还是消费机器人。这些途径受到必须围绕其规划路径的限制。虽然适当算法的选择取决于应用程序,但理想路径规划算法的起点是对过去工作的回顾。从历史上看,算法是根据自主机器人的三个原则进行分类的,即避免不同约束的能力(静态/动态)、环境知识(已知/未知)和机器人知识(一般/特定模型)。然而,文献中的这种划分并不全面,特别是在动力学约束方面。因此,为了解决这个问题,我们提出了一种新的分类法,基于表征空间的基本原则,即作为一组不同的、不相关的点或作为一组共享关系的点。我们表明,这种分类法可以有效解决路径规划的重要参数,例如空间的连通性和分区。因此,路径规划空间现在可以被视为一组点或具有结构的空间。前者严重依赖机器人模型,因为没有考虑环境的数学结构。因此,所使用的方法是优化算法的变体和基于模型的方法的特定变体,这些方法是为了抵消动态约束的影响而定制的。后者将空间描述为具有相互连接关系的点,例如曲面或流形。这些结构允许使用基于同伦的方法对路径进行独特的表征。因此,从动态约束的角度来看,这项工作的目标如下:首先,我们为机器人路径规划文献提出了一种包罗万象的分类法,考虑了空间的基础结构。其次,我们提供了详细的作品积累,这些作品确实专注于表征空间中的路径,以显示潜在的结构。这项工作通过执行以下操作来实现目标:它强调了路径规划文献的现有分类,识别了常见分类中的差距,基于路径规划空间的数学性质(拓扑属性)提出了新的分类法,并提供了广泛的分类法这个新提议的分类法涵盖的文献。


























 京公网安备 11010802027423号
京公网安备 11010802027423号