Machine Vision and Applications ( IF 3.3 ) Pub Date : 2024-04-07 , DOI: 10.1007/s00138-024-01526-2 Wugen Zhou , Xiaodong Peng , Yun Li , Mingrui Fan , Bo Liu
|
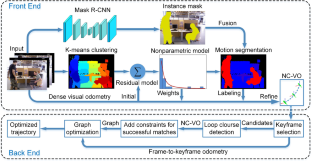
The robustness of dense visual SLAM is still a challenging problem in dynamic environments. In this paper, we propose a novel keyframe-based dense visual SLAM to handle a highly dynamic environment by using an RGB-D camera. The proposed method uses cluster-based residual models and semantic cues to detect dynamic objects, resulting in motion segmentation that outperforms traditional methods. The method also employs motion-segmentation based keyframe selection strategies and frame-to-keyframe matching scheme that reduce the influence of dynamic objects, thus minimizing trajectory errors. We further filter out dynamic object influence based on motion segmentation and then employ true matches from keyframes, which are near the current keyframe, to facilitate loop closure. Finally, a pose graph is established and optimized using the g2o framework. Our experimental results demonstrate the success of our approach in handling highly dynamic sequences, as evidenced by the more robust motion segmentation results and significantly lower trajectory drift compared to several state-of-the-art dense visual odometry or SLAM methods on challenging public benchmark datasets.
中文翻译:
基于关键帧的 RGB-D 密集视觉 SLAM 在动态场景中融合语义线索
密集视觉 SLAM 的鲁棒性在动态环境中仍然是一个具有挑战性的问题。在本文中,我们提出了一种新颖的基于关键帧的密集视觉 SLAM,通过使用 RGB-D 相机来处理高度动态的环境。该方法使用基于聚类的残差模型和语义线索来检测动态对象,从而产生优于传统方法的运动分割。该方法还采用基于运动分割的关键帧选择策略和帧到关键帧匹配方案,减少动态对象的影响,从而最大限度地减少轨迹误差。我们基于运动分割进一步过滤掉动态对象的影响,然后采用来自当前关键帧附近的关键帧的真实匹配,以促进循环闭合。最后,使用g2o框架建立并优化位姿图。我们的实验结果证明了我们的方法在处理高动态序列方面的成功,与在具有挑战性的公共基准数据集上的几种最先进的密集视觉里程计或 SLAM 方法相比,更稳健的运动分割结果和显着更低的轨迹漂移证明了我们的方法的成功。


























 京公网安备 11010802027423号
京公网安备 11010802027423号