Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
A Soft Collaborative Robot for Contact‐based Intuitive Human Drag Teaching
Advanced Science ( IF 15.1 ) Pub Date : 2024-04-22 , DOI: 10.1002/advs.202308835 Shoulu Gong 1 , Wenbo Li 2, 3 , Jiahao Wu 1 , Bohan Feng 1 , Zhiran Yi 2 , Xinyu Guo 2 , Wenming Zhang 2 , Lei Shao 1
Advanced Science ( IF 15.1 ) Pub Date : 2024-04-22 , DOI: 10.1002/advs.202308835 Shoulu Gong 1 , Wenbo Li 2, 3 , Jiahao Wu 1 , Bohan Feng 1 , Zhiran Yi 2 , Xinyu Guo 2 , Wenming Zhang 2 , Lei Shao 1
Affiliation
|
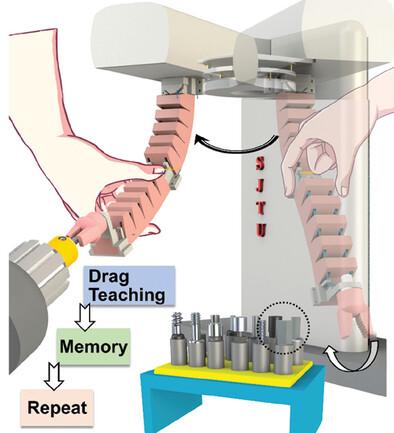
Soft material‐based robots, known for their safety and compliance, are expected to play an irreplaceable role in human‐robot collaboration. However, this expectation is far from real industrial applications due to their complex programmability and poor motion precision, brought by the super elasticity and large hysteresis of soft materials. Here, a soft collaborative robot (Soft Co‐bot) with intuitive and easy programming by contact‐based drag teaching, and also with exceptional motion repeatability (< 0.30% of body length) and ultra‐low hysteresis (< 2.0%) is reported. Such an unprecedented capability is achieved by a biomimetic antagonistic design within a pneumatic soft robot, in which cables are threaded to servo motors through tension sensors to form a self‐sensing system, thus providing both precise actuation and dragging‐aware collaboration. Hence, the Soft Co‐bots can be first taught by human drag and then precisely repeat various tasks on their own, such as electronics assembling, machine tool installation, etc. The proposed Soft Co‐bots exhibit a high potential for safe and intuitive human‐robot collaboration in unstructured environments, promoting the immediate practical application of soft robots.
中文翻译:

用于基于接触的直观人类拖动教学的软协作机器人
软材料机器人以其安全性和合规性而闻名,有望在人机协作中发挥不可替代的作用。然而,由于软材料的超弹性和大滞后带来的复杂可编程性和较差的运动精度,这种期望与实际工业应用相距甚远。在此,报道了一种软协作机器人(Soft Co-bot),通过基于接触的拖动教学进行直观和简单的编程,并且还具有出色的运动重复性(<身体长度的0.30%)和超低滞后(<2.0%) 。这种前所未有的能力是通过气动软机器人内的仿生对抗设计实现的,其中电缆通过张力传感器连接到伺服电机,形成自感知系统,从而提供精确的驱动和拖动感知协作。因此,软协作机器人可以首先通过人类拖动进行教学,然后自行精确地重复各种任务,例如电子组装、机床安装等。所提出的软协作机器人在安全和直观的人类方面表现出巨大的潜力。 ‐非结构化环境中的机器人协作,促进软机器人的立即实际应用。
更新日期:2024-04-22
中文翻译:
用于基于接触的直观人类拖动教学的软协作机器人
软材料机器人以其安全性和合规性而闻名,有望在人机协作中发挥不可替代的作用。然而,由于软材料的超弹性和大滞后带来的复杂可编程性和较差的运动精度,这种期望与实际工业应用相距甚远。在此,报道了一种软协作机器人(Soft Co-bot),通过基于接触的拖动教学进行直观和简单的编程,并且还具有出色的运动重复性(<身体长度的0.30%)和超低滞后(<2.0%) 。这种前所未有的能力是通过气动软机器人内的仿生对抗设计实现的,其中电缆通过张力传感器连接到伺服电机,形成自感知系统,从而提供精确的驱动和拖动感知协作。因此,软协作机器人可以首先通过人类拖动进行教学,然后自行精确地重复各种任务,例如电子组装、机床安装等。所提出的软协作机器人在安全和直观的人类方面表现出巨大的潜力。 ‐非结构化环境中的机器人协作,促进软机器人的立即实际应用。


























 京公网安备 11010802027423号
京公网安备 11010802027423号