
Abstract
Large MR (MR) dampers are popular due to their higher damping force capabilities which makes them suitable in the field of civil engineering, structural engineering, suspension bridge structure, mining engineering, and agricultural engineering applications. This paper presents a comprehensive review of large MR dampers. The classifications and applications of large MR dampers, the principle of operation, different fluid models, their structural design and control systems are classified and reviewed in this paper. The large MR dampers have higher damping force controllability than conventional MR dampers. The review indicates that the large MR dampers have enough vibration mitigation ability and higher damping performances.
Similar content being viewed by others
1 Introduction
Magnetorheological (MR) fluid which is a smart material was first developed by Jacob Rainbow in the 1940s [1]. MR damper [2] is a vibration control device that uses MR fluid for its operating environment was first developed by Lord Corporation in the early 1940s [3, 4]. Since then MR fluid has become an important engineering field to develop. MR fluid contains suspended iron particles in oil or carrier fluid [5, 6]. In the presence of a magnetic field the rheological properties (yield stress) of MR fluid change within milliseconds [7]. The iron particles in MR fluid align along the direction of the magnetic field and form a chain structure thus transform it from viscous into a semi-solid state [8]. In an MR damper, the magnetic field is generated and controlled using an external power source that supplies current to the piston coil [9]. Thus controllable damping force can be achieved [10]. This controllable mechanical properties of MR fluid attracted many researchers to develop different MR devices [11,12,13,14] through the years. MR damper based semi-active control system came to the attention of many researchers and has been developing as a shock reducing device due to its controllable damping force [15], simple design [16], low power usage [17] and cost-effectiveness [18]. MR damper has been practically utilized in different engineering applications. It has been developed for automobile suspension [19, 20], railway vehicles [21, 22], helicopter landing gear systems [23, 24], civil infrastructure [25,26,27], cable bridge [28, 29], and vibration isolation system [30].
MR dampers were commercially applied on vehicle suspension system [31] as it reacts to vibration motion quickly and provides sufficient damping force. Thus, human comfort during riding is achieved. Desai et al. [32] examined the damping performance of the RD-8040-1 MR damper for seat suspension that ensured better damping range and rides comfort. Whereas, Du et al. [33] proposed an MR damper-based suspension system using an adaptive skyhook control that improved the vehicle ride performance further. Besides, MR damper is commercially implemented by many researchers on the washing machine [34, 35], prosthetic knee [36, 37] applications also. The required damping force is less in these cases.
Different damping devices are used against earthquake and wind-induced structural vibration. Passive control devices were incorporated inside the building structure to absorb energy from earthquake vibration. Among them, fluid viscous dampers [38, 39], viscoelastic dampers [40, 41], hysteretic dampers [42, 43], metallic and friction devices [44] are mostly used. But the use of these damping devices reduces due to higher cost, high nonlinear response, fluid leakage and less reliability issue [44]. MR damper is also proposed to use in different structural areas where higher damping force is required to isolate the large-frequency vibration. The first large MR damper with 300KN capacity was developed by Sanwa Tekki Corporation in 2001 and installed at Tokyo National Museum of Emerging Science and Innovation for protection against seismic excitation [45]. Later in 2003, a 400KN MR damper was used in a residential building at Keio University in Japan developed by Sanwa Tekki Corporation [46, 47]. As MR damper has better response control over passive dampers, researchers [48,49,50,51,52,53] have been developing large-scale MR damper for bridge, railway bridge, building structure through the years.
Heo et al. [54] developed a sliding mode control with optimal polynomial control based MR damper (30KN) system with lumped mass to mitigate pounding between spans and abutment under seismic load. The experimental result showed it could mitigate the pounding of the bridge span effectively whereas the damage of bridge piers was experimentally reduced by Heo et al. [55] using a hybrid seismic response control based MR damper (1000KN) system. The active systems consume more energy in earthquake or wind vibration reduction [56]. To decrease the power consumption, semi-active or adaptive systems were developed for reducing the wind and earthquake induced structural vibration [57,58,59]. Yeganehfallah and Attari [60] proposed a robust controller and simulated the response phenomenon of the cable-stayed bridge structure with an MR damper (1000KN)-based semi-active control system. For the same control system, Bathaei et al. [61] proposed two different types of Fuzzy logic controller (FLC) where the type-2 FLC was proven more effective in reducing the response time of bridge structure, whereas six semi-active fuzzy controllers were devised by Hormozabad and Tanha [62]. A similar study was also examined using a building model by Bathaei et al. [63] with a tuned mass system with an MR damper(1000KN) where the type-2 FLC controller was also worthwhile in performance. As the fuzzy controllers have some lacking, Bozorgvar and Zahrai [64] designed an adaptive neuro-fuzzy interference system (ANFIS) for MR damper to reduce the response time of building structure. The system had better efficiency than other controllers. Bhaiya et al. [65] developed a control system for MR damper-based building structure and showed that it is less effective when subjected to near field earthquake. Fu et al. [66] developed two control system and experimentally showed that a 20KN capacity MR damper-based isolation system in a concrete structure responds quickly against a different level of a large earthquake. Gong et al. [67] developed a 10 kN capacity MR damper with a pseudo-negative-stiffness (PSN) control system. Experimental results showed that under different level of earthquake it performs better than other control systems. Cruze et al. [68] proposed a multi coil large MR damper and experimentally validated that it can generate sufficient damping force of 5.83kN for seismic mitigation of building structure.
This paper aims to review a literature on large MR damper, their classification and application, their design strategy, implementation, and development over the years. This paper also presents the classification of large MR damper based on different mathematical models and control systems.
2 Applications of MR dampers
Both active and passive suspension systems can be summarized by MR dampers thus attracted the attention of many researchers to use MR damper in different applications. Besides, the high damping force and durability of MR damper replaced other vibration control devices in many engineering applications. Several MR damper systems and their applications are presented in Table 1.
Different MR fluid-based devices application are shown in Table 2.
2.1 Classifications
The optimization in design can enhance the performance by changing the number of the coil-like single-coil [108], double coil [109], multi-coil [110]. The classifications of MR dampers depend on their design, coils turn number, piston coils, bypass valve, control valve, and power-producing capacity.
The main two basic types of MR dampers are monotube [111, 112] and twin-tube [112, 113] which are either can be double-ended [114, 115] or single-ended [116] MR dampers. Monotube MR damper contains one fluid reservoir while the twin-tube has two reservoirs [117]. MR damper with a single-ended structure has one piston rod while the double-ended structure has an extended piston rod from both ends of the cylinder. MR damper can either have inner or outer coils mechanism. In an inner coil mechanism, the coils are wounded inside the piston of the MR damper [118] while the external coils [119] are wounded on the outer structure of the damper. The piston incorporates a different number of coils that can be a single coil, double coils or multi coils. Based on control valves, the flow mode in MR damper can be categorized as single flow mode [120] and mixed flow mode [121]. Single flow mode MR dampers can be characterized as flow mode [122], shear mode [123], and squeeze mode [124] MR dampers.
Based on different flow channel MR dampers can be classified as inner bypass or outer bypass which either can be single-ended [125], double-ended [126], or piston bypass [125, 127] type. The outer bypass MR dampers can be categorized as outer tube bypass [128, 129], double-ended bypass [129], bypass MR valve [130], meandering type valve [131] and bypass spool valve [132] MR dampers. According to the size, MR dampers can be classified into three types such as short stroke, long stroke and large MR dampers. In the short stroke and long stroke MR dampers, the stroke length varies from 55 to 74 mm [133] while for large stroke MR dampers, stroke length varies from 160 to 300 mm.
2.2 Working principle of MR damper
The working system of conventional MR damper is shown in Fig. 1. The MR damper device is installed with other sensor and power system that provides information about controlling damping force. An external power source is utilized to supply current to the piston coil while the piston reciprocates to and fro within the cylinder chamber [134]. This current induces a magnetic field around the fluid flow path and under the interaction with magnetic field the fluid changes its phase from liquid to solid state [135]. The system controller takes data from sensors that is connected to the system where damping force is required. Thus, the current driver delivers different level of current as per requirement and controllable damping force obtained. A typical MR damper is shown in Fig. 2.

Schematic diagram of MR damper-based semi-active control system [17]

MR damper structure [136]
2.3 Operation modes
The MR dampers are a type of MR dampers that utilize the larger stroke into a shear stress development in the MRFs region. The principles of operation of large MR dampers are based on shear mode operation, flow mode operation, squeeze mode and mixed-mode operation. MR damper operations are divided into three parts namely single flow mode [137], mixed-mode [138], and multimode [139]. The combined operation of the valve and direct shear mode is called mixed mode. On the other hand, the squeeze mode [140], direct shear mode [141] and valve mode [142] are called multi-mode operations.
Particularly, when the fluid is translated parallel to the wall are called shear mode (Fig. 3a) [143]. In the flow mode MR damper, the bi-fold mode causes high-pressure differences to develop higher damping force in a small volume. This is also illustrated in (Fig. 3b) [37].

Figure 4a presents the mixed-mode MR damper as a combined working mode of shear and squeeze mode. In the mixed-mode operation, the MR damper generates a higher damping force in comparison with the MR damper [127, 144, 145]. Figure 4b presents the squeeze mode MR damper which transpires due to the wall sliding movement and squeezing out the fluid [146].

Among the three-damping operation, mixed-mode MR dampers are more controllable and generate a higher damping force.
3 Applications of large MR dampers
Table 3 shows the applications of different large MR damper.
3.1 Large MR damper working principle
Large MR damper works similarly to conventional MR damper. Large MR damper consists of a piston, piston rod, cylinder, electromagnetic coil, seal, shaft bearing, MR fluid and accumulator [160]. An external power supply is used to supply sufficient current to the coil that produces a magnetic field. Figure 5 shows the schematic diagram of large MR damper. The sensors and controller are used to detect the displacement of the structure. During piston movement, the MR fluid in the cylinder flows through the orifice of the piston and the fluid transforms its phase from liquid to semi-solid due to the presence of the magnetic field [160]. Thus, required damping force obtained and vibration controlled. Figure 5 shows the large MR damper components.

Schematic of large MR damper [160]
4 MR Damper numerical models
To design an efficient semi-active control system for MR dampers several fluid models are required. Till to date, a group of researchers developed different mathematical models for analyzing behavior and characteristics of MR dampers performances. To predict the response of physical MR damper, several techniques, parametric models, and reliable approach has designed already, and those models can predict non-linear response. Table 4 shows the different fluid models for MR dampers. Among these, the Bingham model, the Bouc-Wen and the Modified Bouc-Wen models are some of the most common models utilized to predict the characteristics of MR dampers [161]. In this regards, large MR dampers are one of the categories of MR dampers.
5 Large MR damper classification
5.1 Monotube Large MR damper (single-ended)
The first monotube large-scale MR damper was developed by Lord Corporation [193] in the 1990s. In 2005s the second generation of large MR damper was also developed by Lord Corporation [193].
5.1.1 Bingham model-based monotube large MR damper (single-ended)
Sodeyama et al. [194] developed the Bingham model-based three types of MR dampers having capacity of 2 kN, 20 kN, and 200 kN (Fig. 6a) which included two types of MR fluids, and two hysteretic models. The damping forces versus displacement showed a significant increment as frequency and trial product #104 by Bando Chemical than conventional MRF-132LD by Lord Corporation. A typical involution model was developed to characterize force–velocity as shown in Fig. 6b presents the involution model for large MR damper (Eq. 1).

a Cross-sectional view of 200KN large MR damper and b Involution model of MR damper [194]
In the Fig. 7a–7d presents several large MR damper applications and their real-world application. Figure 7a–7c shows that large MR damper connected to the structure as a vibration support device for seismic vibration control. Figure 7d shows regenerative large MR damper used in structure support for vibration control.

where F, \({C}_{i}\) and \({V}^{n}\) are the damping force, damping coefficient and velocity of the piston.
Stanway et al. [198] investigated the electrorheological (ER) damper and proposed a mechanical model. This model is known as the Bingham plastic model. This model combines a viscous damper a dashpot and a coulomb friction element which are placed in parallel as shown in Fig. 8. The nonlinear Bingham plastic model (Eq. 2) usually used for characterizing MR dampers force from Fig. 8a

where, \({C}_{i}\) and \({f}_{c}\) represents the damping coefficient and frictional force connected to the fluid yield stress and \(sgn\) for signum function. \(x \mathrm{and} F\) are the displacement of MR damper and damping force [28].
However, the Bingham behavior of an MR damper can also be derived from the Bingham plastic model for MR fluids given by Eq. (1) through the study of an axisymmetric model of the MR fluid flow [30]. Wereley et al. [93] investigate the Bingham model where the parallel plate geometry or axisymmetric model is used to develop an MR damper model using shear force mechanism and supports the several MR dampers models [93, 106, 108]. The following equations are as follows:
where, \({C}_{\rm{post}}\) is the post-yield damping and \({F}_{y}\) is the yield force and \(\dot{x}\) is velocity.
The model is given by Eq. (3) assumes that, in the pre-yield condition, the material is rigid and does not flow; hence, when |\(F\left(t\right)\)|< \({F}_{y}\)the shaft velocity \(\dot{x}\)=0. Once the force applied to the damper exceeds the yield force, then the fluid begins to flow and the material is essentially a Newtonian fluid with nonzero yield stress. In this constitutive model, the yield force is obtained from the post-yield force versus velocity asymptote intercept with the force axis. The Bingham model accounts for MR fluid behavior beyond the yield point, i.e., for fully developed fluid flow or sufficiently high shear rates. However, it assumes that the fluid remains rigid in the pre-yield region. Thus, the Bingham model does not describe the fluid elastic properties at small deformations and low shear rates, which are necessary for dynamic applications [113]. Considering that the width of the hysteretic loop with the Bingham model is relatively narrow, Weng et al. [127] constructed a more complicated model to represent the wider hysteretic loop and the updated model can be expressed by Eq. (4). The following equation can be written as:
where \({k}_{H}\), \({\dot{x}}_{H}\) and \(\dot{a}\) are the represents the shape coefficient, hysteretic velocity and acceleration. \({k}_{H}\) and \({\dot{x}}_{H}\) are the functions of applied current \(I\)
A 400KN large MR damper (Fig. 9) was developed by Fujitani et al. [47] using Bingham visco-plastic model for civil structural vibration control. Several research groups developed large MR damper using the Bingham model for time delay reduction [164, 198, 199] and they investigated time delays in the case of control systems, electrical parts, and mechanical parts of the dampers.

400KN bypass type MR damper [47]
5.1.2 Maxwell Nonlinear Slider (MNS) model-based monotube large MR damper (single-ended)
Chen et al. [200] developed a monotube large MR damper (Fig. 10) based on Maxwell Nonlinear Slider (MNS) model for real-time hybrid simulation. The MR fluid behavior (pre-yield and post-yield region) was characterized by the MNS model by utilizing Hershel–Bulkley fluid model. Bouc-Wen model, hyperbolic tangent model and MNS model were compared with experimental results as shown in Fig. 11. Maximum damping forces were found for the MNS model and this damper was specially developed for seismic vibration control three-storied building structure.

Schematic of large-scale MR damper [200]

Model comparisons of Large MR damper (Quasi-static behavior) using sinusoidal test results: a I = 0.0 A and b I = 2.5 A [200]
To overcome the dynamics of a large MR damper, a variable current controller was then developed for the similar MNS model. The response time using the variable current MNS model showed an improved accuracy using RTHS [200]. The MNS model [175] has pre-yield and post-yield regions. The pre-yield and post-yield regions can be separated independently according to their behavior. The details of the MNS model can be found in Fig. 12 and Fig. 13 where \(x, y \mathrm{and} z\) presents the degree of freedom responsible for damper deformation, pre-yield and post-yield region variables.

Proposed phenomenological MR damper model: Maxwell Nonlinear Slider (MNS)

Pre-defined post-yield curves for MNS model [175]
MR damper model [175].
The pre-yield region damping force behavior can be solved using Eq. (5) which is known as the Maxwell element model differential equation
where \(c\) and \(k\) are viscous and stiffness co-efficient.
When the damper is in pre-yield mode, \(\dot{y}\) is equal to the damper velocity \(\dot{x}\). The initial value of y is set to be equal to \(x\); thus Eq. (5) can be solved in terms of \(z\) for a given \(x\) and the damper force is then determined. The values of \(c\) and \(k\) for the Maxwell element are obtained from the force–velocity relationship observed in damper characterization tests, selecting two appropriate points on the hysteretic response curve, and then applying visco-elasticity theory. Assuming the Maxwell element is subjected to a harmonic motion with an amplitude of \({u}_{0}\) and circular excitation frequency of \(\omega\), the coefficients \(c\) and \(k\) are calculated from Eqs. (6) and (7) which are as follows:
where \({f}_{0}\) and \({f}_{m}\) are the damper force when the damper velocity is zero and a maximum value, respectively. In the post-yield mode, \(\dot{x}\) defined as velocity. Post-yield curves are defined as the Herschel-Bulkley model [201] and tangential curve velocity is \({\dot{x}}_{t}^{+}or {\dot{x}}_{t}^{-}.\) The mathematical model (Eqs. 8, 9, 10) can be written as follows:
where \(a, b \mathrm{and} c\) are damper characterization parameters and \({a}_{t}\)=\(b{n\left|{\dot{x}}_{t}^{+}\right|}^{n-1}\) and \({f}_{t}^{+}= a+b{\left|\dot{x}\right|}^{n}\). However, in Eq. (9) the post-yield damping force \({F}_{post}\) can be written as
where,\({f}_{py}\) and \({m}_{0}\) are positive or negative force and mass acceleration which is predicted force by the MNS model. If the mode is changed from post-yield to pre-yield in the MNS model, then the equation can be written as
where \({F}_{pre}\) is the pre-yield force.
5.1.3 Hyperbolic tangent function-based mono tube single-ended large MR damper
Based on hysteresis and linear function, Kwok et al. [187] proposed the force of hyperbolic tangent function model where they analyzed viscous and stiffness of the MR damper (Fig. 14). To define the MR damper hysteretic force–velocity behavior, a strategy was deployed where a simple model is proposed here to model the hysteretic viscous damping (dashpot), spring stiffness and a hysteretic component as shown in Fig. 15. Equation (11, 12) shows the mathematical expression of the hyperbolic tangent function model [187]. The following equations are as follows:
where \(\alpha , \beta , \delta , \gamma ,n\) are model parameters, \(c\) and \(k\) are the viscous and stiffness coefficients, \(\mathrm{z}\) the hysteretic variable given by the hyperbolic tangent function and \({f}_{d}\) is the damper force offset. This model is applicable for parameter identification and subsequent inclusion in controller design and implementation.

MR damper structure [187]

a Hysteresis model—component-wise additive approach and b hysteresis parameters [187]
Figure 15b presents the component building hysteresis which describes force–velocity response using the effects of the parameter. The components building up the hysteresis are depicted in Fig. 15b which illustrates the effects of the parameters on the damper force–velocity response. The basic hysteretic loop, which is the smaller one is shown in Fig. 15b, which is determined by β. This coefficient is the scale factor of the damper velocity defining the hysteretic slope. Thus, a steep slope results from a large value of β. The scale factor δ and the sign of the displacement determine the width of the hysteresis through the term δ sign(x), a wide hysteresis corresponds to a large value of δ. The overall hysteresis (the larger hysteretic loop shown in Fig. 15b is scaled by the factor α determining the height of the hysteresis. The overall hysteretic loop is finally shifted by the offset \({f}_{d}\).
After hyperbolic tangent function development, Gamota and Filisko [163] developed viscous and coulomb-based damping mechanisms and later Gavin [202] proposed a hyperbolic tangent model-based electro-rheological fluid damper. Bass and Christenson [203] developed a hyperbolic tangent model-based 200KN MR damper for structural vibration control where over-driven clipped optimal control (ODCOC) was used. Two simplified elements (spring-dashpot elements) constitute the hyperbolic tangent model as illustrated in Fig. 16. The following equations are as follows:

The inertial mass element resists motion employing a Coulomb friction element. The displacement and velocity of the inertial mass relative to a fixed base,\({x}_{0}\), and\({\dot{x}}_{0}\), and displacement and velocity of damper piston end relative to the inertial mass, \({x}_{1}\) and \({\dot{x}}_{1}\), are summed together resulting in the displacement and velocity across the damper, \(x\) and \(\dot{x}\). The pre-yield visco-elastic behavior is modelled by \({k}_{1}\) and \({c}_{1}\). The post-yield visco-elastic behavior is modelled by \({k}_{0}\) and\({ k}_{1}\). The term \({m}_{i}\) represents the inertia of both the fluid and the moving piston. The parameter \({F}_{y}\) is the yield force and \({V}_{\mathrm{ref}}\) is a reference velocity, which affects the shape of the transition from the elastic to the plastic region of the function. Figure 17 show the large MR damper fast hybrid test setup in three different floors.

A schematic of the large MR damper fast hybrid test setup showing the computer structure model and the three physical MR dampers [203]
The error for frequency-amplitude combination and error for larger current across the large MR damper is 17% and 5%, respectively. The hyperbolic tangent model was implemented to capture the silent behavior of a large MR damper. In another research studied hyperbolic tangent function-based large MR damper. In terms of convergence and stability, the hyperbolic tangent function model can run up to 12/1024 (0.012) s while the RMS error at 1/2048 (0.0005) s for the hyperbolic tangent model converges. The hyperbolic tangent model is much slower than other models except the Bouc-Wen model. The hyperbolic tangent shows better accuracy where RMS error at numerical time step equal to 1/1024 (0.001) [204]. The schematic of a large-scale semi-active damper shows in Fig. 18.

Schematic of large-scale semi-active damper [204]
Phillips et al. [51] developed a large 596KN MR damper for building structure control using the hyperbolic tangent function model and four control strategies. The RTHS predicts the performance of large MR damper and force tracking controller found to be higher in performance. Equation (15) expresses the structural behavior of building which is as follows:
where,\(m,c,k,GL ,F,x\) and \({\ddot{x}}_{g}\) are the mass, damping, stiffness, influence vectors, force, displacement vector and ground acceleration.
5.2 Monotube large MR damper (double-ended)
5.2.1 Modified Bouc-wen model-based Monotube Large MR damper (double-ended)
Yang and Cai [205] developed a mixed-mode control system using a 20KN capacity MRD 9000 (Fig. 19) [206] to attenuate the vibration of the suspension bridge generated from vehicle braking force and earthquake. A total of seven control strategies were investigated to get the maximum efficiency. A combination of semi-passive on control and fuzzy control strategies was analyzed that showed better performance on vibration reduction. Figure 19 shows the MR damper installed on bridge.

MRD 9000 by Lord corporation [206]
The damping force can be expressed in Eqs. (16, 17, 18) using the modified Bouc-wen model which can be written as
where z and y are expressed by
where \({c}_{l}\) is the viscous damping at large velocities, \({c}_{k}\) is the viscous damping for force roll off at low velocities, \({k}_{a}\) is the accumulator stiffness, \({k}_{l}\) stiffness at large velocities, \({x}_{i}\) spring initial displacement and A, \(\beta\),\(\gamma\), and n are constant. But the application of this control system was limited to low vibration. During the excessive earthquake, this control system fails to protect the pier and bearing damage to the bridge.
To save the bridge members under excessive earthquakes a real-time semi-active control algorithm based on the damage of bridge members (RTSD) was proposed using a similar 20KN large MR damper [207] by Li et al.[208]. Figure 20 shows the MRF-04 K damper. This proposed model ensured that it can reduce the chance of damage to the bearing and pier more effectively and can set the damping force in a different range. The nonlinearity of the damper was measured using the modified Bouc-wen model.

Cross section of MRF-04 K damper [207]
5.2.2 Phenomenological Bouc–Wen model-based monotube large MR damper (Double-ended)
Yang et al. [209] developed a 200 KN large MR damper (Fig. 21) for structural vibration control using the Bouc-Wen model. They found higher damping force using a small amount of energy and quicker response time (damper coils) using parallel coil connection.

Schematic of the large-scale 200KN MR damper [209]
Sanwa Tekki Cooperation (Japan) [210] and Lord Corporation [133] jointly developed a 300 KN MR damper for seismic vibration control application while in 2003 they also developed a 400 KN MR damper for residential building applications [46, 47]. In 2003, 312 SD-1005 MR dampers were installed at Dongting Lake Bridge in Hunan and Ou et al. [48] developed several large MR dampers for Binzhou Yellow River Bridge China. Meanwhile, Binzhou Yellow River Bridge used several MR dampers for world longest cable-stayed bridge [211]. They used 6000 KN, 12 large MR dampers for vibration control.
In the Fig. 22a–d presents several large MR damper applications in suspension Fig. 22a–d also shows that large MR damper with control system and sensor network.

In 2011, Tu et al. [52] developed a sedimentation proof 500 KN large MR damper (Fig. 23) using a modified Bingham plastic model which was used for parameter identification.

Main parts of full-scale MR damper [52]
Yang et al. [50] proposed a Bouc-Wen model-based double ended large-scale MR damper for structural vibration mitigation. Fluid inertial and shear-thinning effects were also analyzed using the Bouc–Wen model and it is found from the experiment that the current driven power supply is suitable for quicker response time. Cha et al. [214, 215] investigated the time delay of large MR damper using semi-active algorithms for 200KN MR damper to address robustness. Four types of control algorithms were used for semi-active control using the Bouc–Wen model where decentralized output feedback passive controller were more robust for time delay calculation than the clipped-optimal controller.
Bahar et al. [216] proposed a Bouc–Wen hysteresis model based large MR damper for real-time hybrid simulation using a parameter identification algorithm. They also studied large MR damper for benchmark building using parameter identification algorithm [217].
A similar large scale practical MR damper (Fig. 24) developed by Dyke et al. [218] and Rodríguez et al. [219] developed seismic vibration control MR damper (Fig. 25) using Bouc–Wen model and used clipped-optimal control algorithm for real-time applications and similar model and algorithm used by Zapateiro et al. [220] where real-time hybrid testing (RTHT) utilized for time delays and MR damper dynamics control [220].

Schematic of MR damper [218]

Detail structure of MR damper [219]
Bouc–Wen model-based shear mode large MR damper developed for seismic vibration of a five-storied building where they used Bang-Bang, the Lyapunov and Clipped-Optimal controllers [221]. Other research groups developed MR damper integrated with base isolation system for large structure vibration control where they used Lyapunov controller [222].
Chen et al. [223] minimized actuator time delay using the CR algorithm and demonstrated the RTHS technique for experimental validation. Other research group used El-Centro, Kobe and Northridge seismic protection large MR damper numerical and experimental analysis investigation done by Bouc–Wen model and Clipped Optimal Control strategies. They found that the property of the damper can cope with normal natural frequencies and placement of the MR dampers were sensitive cases which include floor optimum location also [224]. The long term reliability of large scales MR dampers such as response time, dissipative capacity, control technique and force response are the critical point of MR damper applications in seismic vibration control [225].
A large MR damper RTHS was done for seismic vibration protection using the Bouc–Wen model where they used a semi-active neuro controller (SA-NC) and found that SA-NC is capable of reducing acceleration and displacement [226]. A similar SA-NC based study was proposed by Chae et al. [227] and Moon et al. [228].
The Bouc–Wen model-based MR damper was proposed by Spencer et al. [56], which is known as modified Bouc–Wen model. The Bouc–Wen model proposed by Bouc [229, 230]and later generalized by Wen [230] for MR dampers numerical investigations such as hysteresis behaviour. The damper force is given by Eq. (19) which can be written as:
where the evolutionary variable z is governed by Eq. (20) which is as follows:
In this model, m = equivalent mass which represents the MR fluid stiction phenomenon and inertial effect; \({k}_{a}\) =accumulator stiffness and MR fluid compressibility; \({f}_{c}\) damper friction force due to seals and measurement bias; and \({c}_{o}\left(\dot{x}\right)=\) post-yield plastic damping coefficient.
To describe the MR fluid shear thinning effect which results in the force roll-off of the damper resisting force in the low-velocity region, the damping coefficient \(c\left(\dot{x}\right)\) is defined as a mono decreasing function with respect to absolute velocity \(\left|\dot{x}\right|.\) The post-yield damping coefficient is expressed in Eq. (21). The post-yield damping coefficient can be written as:
where \({a}_{1},{a}_{2}\), and \(p=\) positive constants.
Besides the proposed phenomenological model (Fig. 26), two other types of dynamic models (Fig. 27) based on the Bouc–Wen model are also investigated. One is the simple Bouc–Wen model with the mass element (Fig. 27a). Note that the damping coefficient is set to be a constant in this model. The other one is the phenomenological model [56] with the mass element (Fig. 27(b)). To assess their ability to estimate the MR damper behaviour, these three dynamic models are employed to fit the damper response under a 1 in., 0.5 Hz sinusoidal displacement excitation at an input current of 2 A. As can be seen, all models can describe the damper force–displacement behaviour very well. However, the simple Bouc–Wen model fails to capture the force roll-off in the low-velocity region. The damping force is shown in Eq. (22) and the damper force is as follows:
where \(\dot{x}\) is the velocity of the piston, \(c\) is the damping co-efficient and \({k}_{s}\) is the linear spring constant.

The proposed phenomenological model of MR dampers [50]

Two other types of phenomenological models of MR dampers based on Bouc–Wen hysteresis model [56]
5.2.3 Phenomenological Dhel friction model based monotube large MR damper (Double-ended)
Dhel friction model [231] was developed by Dahl [231] to characterize the frictional behaviour and a differential equation was used for stress–strain curve modeling. Let x be the displacement, \({f}_{c}\) the friction force and \({F}_{c}\) the Coulomb friction force. Figure 28 presents the typical solid friction force function.

Typical solid friction force function [231]
Solid friction mathematical model (Eq. 23), in terms of time rate of change of solid friction can be written as
where \(F(x)\) is a solid friction force (function of displacement \(x\)). When \(x\) is positive then friction force will be +\({F}_{c}\) and in case of reverse force, \(x<0\) and \(F(x)\) will be negative that is \(-{F}_{c}\). Though \(x\) changes then the friction function slope \(\frac{dF(x)}{dx}\), remains positive. The friction slope functions can be expressed from Eqs. (24, 25, 26, 27) and will be simulated with hysteresis behavior. The following equations are as follows:
For positive velocities \(\mathrm{sgn}\dot{x}\)=\(+1\), then the dimensionless ratio \(r=\frac{F}{{F}_{c}}\)
With
where \(u=\frac{x}{{x}_{c}}\) is a dimensionless displacement variable, and \({x}_{c}\) is a characteristics displacement which can be written as
The modified Dahl model proposed by Zhou and Qu [162] is shown in Fig. 29. This model is used to simulate Coulomb force and avoid too many parameters. The damping force can be written as:
where \(k,\) \({C}_{i}, {F}_{d}, x,{f}_{k}\,\mathrm{ and }\,Z\) are stiffness, damping coefficient, Coulomb force modulated by the applied magnetic field, displacement of MR damper, damper force caused by seals and measurement bias and nondimensional hysteretic variable governed by [231] the following equation:
where \(\mathrm{sgn}\) determines hysteretic loop shape and \(\sigma\) is the rest stiffness or slope of the displacement curve.

Modified Dahl model of MR damper [162]
After modified Dahl model, Ikhouane and Dyke [182] developed a viscous Dahl model for the shear mode MR damper (Figs. 30, 31).

Shear mode MR damper [182]

Viscous + Dahl model for the MR damper [182]
The viscous dry friction model for MR dampers can be written as
Here \(z\) is a no dimensional hysteretic variable and the constants \(\alpha\) and c depend on voltage.
Using the viscous Dahl model, Rodriguez et al. [232] proposed a large MR damper for vibration mitigation using Bouc-Wen and Dahl frictional model [233]. The proposed model verified the viscous term which was smaller than hysteresis one and modified identification technique. They found Dahl friction model [233] generated higher error than Bouc–Wen model. Bouc–Wen model was more suitable for large MR fluid damper modeling. Dhel friction model was used for three-storied building vibration reduction while for larger storied was not considered. The issue of high payload, particle sedimentation and magnetic flux distribution was not considered also. Jiang and Christenson [204] investigated the Dahl friction model using Aguirre et al. [234] viscous plus Dahl model. It was found from the RTHS that the Dahl friction model is more sensitive during the change of numerical integration time step than algebraic model and viscous plus Dahl models follows the simpler equations modeling the force behavior.
5.2.4 Bingham model-based Monotube Large MR damper (double-ended)
Kui et al. [235] proposed a large 1400 N MR damper to mitigate the unwanted pipeline vibration using Bingham plastic non-linear fluid model and linear quadratic regulator (LQR) control algorithm. The use of an LQR control system and magnetism insulator ensures the high magnetic flux density that results in high damping performance. Figure 32 shows the 3D model of the MR damper. The damping force is given in Eq. (32). The damping force using the Bingham plastic non-linear model can be expressed as
where,\({F}_{\tau }\) is the shear stress, \({F}_{\eta }\) is the viscous stress, \(\eta\) is the dynamic viscosity of MR fluid, h is the width of damping gap, \({A}_{e}\) is the effective area of the piston, \(l\) is the effective length of the piston, \({\dot{u}}_{r}\) is the relative velocity of the piston and cylinder and \({D}^{^{\prime}}\) is the mean diameter of the damping gap. The dynamic range of MRF damper can be written as

3D model of MR damper [235]
5.2.5 Herschel-Bulky model-based Monotube Large MR damper (double-ended)
A semi-active control system incorporating a large 200KN MR damper was proposed by Peng and Zhang [236] to understand the full operating environment of the system for control structure. The Herschel-Bulky model was employed to understand the MR fluid characteristic. The simulation results match well with the experimental data. Figure 33 shows the MR damper.

Shear value modal MR damper [236]
The features of Herschel-Bulkley model (Eqs. (33, 34) defines both Bingham plastic model and power law model. The rheological behavior of MR fluids using Herschel-Bulkley model can be written as
where \(\eta\), \({k}_{c}, {\tau }_{y}\) \(n\) and \(\dot{\gamma }\) are the dynamical viscosity, consistency index, yield shear stress, power law index and strain rate.
Finally, the Herschel-Bulkley fluid model [237] can be written as
where \({H}_{0}\) is the strength of the magnetic field.
5.2.6 Double sigmoid model-based Monotube MR damper (double-ended)
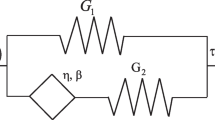
A semi-active control system base MR damper is proposed by Ji et al. [158] to reduce the low-frequency vibration in the pipeline by introducing three different control modes. Results showed that the sliding mode variable structure control mode had better vibration reducing proficiencies than PID control at high frequency level. A double-sigmoid model was developed to express the damping force of the MR damper shown in Eq. (35) which can be written as
where, \({F}_{c}\) is the adjustable coulomb damping force, \({x}_{v}\) is the displacement value when damping force was zero, \(x\) and \(\dot{x}\) are relative displacement and velocity of MR damper piston and cylinder, \({C}_{i}\) is the viscous damping coefficient and \(a\) is the velocity adjustment co-efficient of coulomb damping force.
5.3 Twin tube large MR damper (single-ended)
5.3.1 Bingham model-based twin tube large MR damper
Zolfagharian et al. [238] developed an unsteady analytical model combined with quasi-static analysis and experimentally investigated the MR fluid flow behavior through the piston annular channel of a twin-tube MR damper. Figure 34 presents single ended twin tube large MR damper structure.

Single ended twin-tube MR damper [238]
The result showed that the new unsteady analytical model can measure the phase difference more effectively than other models which also results in higher damping force. The non-Newtonian fluid characteristic was described through the Bingham plastic model, where the developed shear stress (Eq. 36) can be written as
where, \({F}_{\tau }\) is the shear stress, \({\tau }_{y}\) is the yield stress, \(H\) magnetic field amplitude, \(\dot{\gamma }\) shear strain rate and \(\eta\) is the viscosity of MRFs.
5.4 Twin tube large MR damper (double-ended)
5.4.1 Phenomenological Bouc-wen model-based twin tube large MR damper (double-ended)
A new phenomenological model was proposed by Spencer et al. [56] and applied by Wang et al. [239] to improve the long-term operation capability of the MR damper by analyzing the mechanical characteristic of the dampers which were in operation for a long time in cable bridge. Figure 35 presents schematic of twin-tube large MR damper.

Twin-tube large MR damper [239]
The modified model is shown in Fig. 36. The final damping force (Eq. 37) of the model can be written as

Phenomenological mechanical model [56]
where \({c}_{b}\) is used to model the roll off phenomenon of MR damper at low motion velocities,\(k\) is the stiffness of the accumulator, \(x\) is the displacement of the piston, \({x}_{i}\) is the initial displacement of the spring and \({A}_{1}\) and \({A}_{2}\) are the modified co-efficient for the bottom right part and top left part of the displacement damping force loop..
The experimental results showed that the used dampers were a lack in efficiency due to the leakage problem of MR fluid and the new proposed model had a better effect on the mechanical properties of the dampers.
6 Control algorithm strategies of large MR dampers
Several control strategies were taken last decades to minimize response time, time delays, dissipative energy capacity, force responses, robustness and excessive cost etc. The control techniques of large MR dampers are passive, active, and semi-active [46]. Passive control techniques are used in base-isolators, elastomeric and frictional dampers, and tuned-mass dampers while active control systems are used in active bracing/tendon systems, active-mass drivers, and active variable-stiffness devices [240]. A semi-active control system combines both passive and active control strategies which is especially used in large force requirements using lesser power [241]. Semi-active device used in variable friction/stiffness dampers and controllable-fluid dampers (electrorheological (ER) and MR (MR) fluid dampers) [242]. The semi-active control methods are model-based control and soft computing-based control. Model-based control techniques are bang–bang control, back-stepping control, sliding mode control, \({H}_{2}\) and \(H\)∞ control, adaptive/non-linear control, and bilinear control while soft computing-based control are neural network-based control, fuzzy logic control, and genetic algorithm-based control [53, 214, 243].
6.1 Skyhook control algorithm
Karnopp et al. [244] proposed a ‘skyhook’ damper control algorithm (Fig. 37a) for a vehicle suspension system [135, 245]. An MR damper [246] with skyhook control system for vehicle suspension system is shown in Fig. 37b.

The skyhook control law can be written as.
Where \({F}_{b}\) is the control force, \(c\) and \(k\) viscous and stiffness co-efficient.
6.2 Decentralized bang-bang control
Other research group such as McClamroch and Gavin [247] proposed decentralized bang-bang control law using the Lyapunov control algorithm. They reported that this control system is accurately working for ER dampers application with maximum and minimum dissipation rate. The control law can be represented as
where \({v}_{o}\), is the input voltage to the current driver, \({V}_{max}\) is the maximum allowable voltage and \(h\) is the Heaviside step function.
6.3 Clipped-optimal control (COC)
Acceleration feedback-based Clipped-optimal control (COC) (Fig. 38) was proposed by Dyke et al. [248] to overcome the full-state feedback or on velocity feedback control system. Accelerometers based COC can provide a reliable and inexpensive solutions. COC algorithm needed to design a linear optimal controller \({K}_{c}\) which will provide control force \({F}_{b}\) based on measured response \(y\) i.e.:

Block diagram of the semi-active control system [248]
where L is Laplace transform, \(f\) is the measured force, \({y}_{j}\) is measured output vector, \({v}_{i}\) is the measured noise vector and the control law can be written as.
where \({V}_{\mathrm{max}}\), \(H\), are the voltage to the current driver related to the saturation of the magnetic field in the MR damper and Heaviside step function.
Heo et al. [249] proposed an MR damper (Fig. 39) using clipped optimal control system for a cable stayed bridge to control seismic vibration.

6.4 Homogeneous friction controller
Inaudi [251] proposed a Homogeneous friction controller for semi-active control of structures. This controller system is also known as modulated homogeneous friction (MHF) controller. This proposed controller shows quadratic dissipation of energy per cycle in the deformation amplitude, maximum dissipation efficiency for resistance-force level proportional to deformation, and simple and accurate linearization. In addition, a modified type of modulated homogeneous friction controller proposed by He et al. [252] that is capable of increasing the performance of MR dampers. The proposed control law is shown in Eqs. (43, 45, 46) which can be written as
where, \(N\left(t\right)\) is controllable contact force, \(\Delta \left(t\right)\) is damping deformation, \(\mu\) is coefficient of friction, \(g\) is the positive gain coefficient and \(\Delta (t-s)\) is local peak of deformation signal.
6.5 Semi-active control algorithms
Xu et al. [199] proposed semi-active control algorithms which is based on neural networks applied for MR dampers structures. The control algorithm can be written as [253]
where, x is the vector of relative displacement of the floors of the structure, \(\ddot{{x}_{g}}\) is one-dimensional ground acceleration, \({F}_{b}\) is measured control force, Г is column vector of ones, λ is the vector determined by the position of MR damper. An MR damper with semi active control system [199] based on neural network is shown in Figs. 40 and 41.

Structure of neural network controller [199]

Schematic diagram of MR damper [199]
6.6 Quasi-bang-bang control algorithm
The quasi-bang-bang control algorithm (Eq. 48) proposed by Barroso et al. [254] for MR dampers structures and proposed controllers considered static equilibrium conditions. The equation can be written as follows [255]
where \({V}_{max}\) is the maximum voltage.
6.7 Lyapunov control theory
To provide higher performance Spencer and Nagarajaiah [46] proposed Lyapunov control theory-based damping control system for MR dampers. The control law (Eq. 49) for Lyapunov control theory can be written as
where \({c}_{\mathrm{max}}\) and \({c}_{\mathrm{min}}\) are maximum and minimum damping coefficients, respectively, and \({\omega }_{n}=\sqrt{k}/m\), and \({u}_{a}(t)\) is the absolute displacement of the single degree of freedom (DOF) and \({\dot{u}}_{r}\) is the relative velocity.
A Lyapunov control system-based MR damper [256] and the control block diagram is shown in Figs. 42 and 43.

Schematic of MR damper [256]

Block diagram of the control scheme [256]
6.8 Decentralized Output feedback polynomial controller (DOFPC)
Cha and Agrawal [257] investigated decentralized output feedback polynomial controller (DOFPC) for both active and semi-active controls of the highway suspension bridge. The control strategy is expressed in terms of velocity and displacement across MR dampers using 3rd order polynomial equation. The equation can be written as
where \(v\) is the control signal,\(x and \dot{x}\) are the interstory drift and interstory velocity, respectively, \({q}_{0},{q}_{1},{q}_{2},{q}_{3,}{r}_{o},{r}_{1},{r}_{2} \mathrm{and} {r}_{3}\) are optimal co-efficient of the polynomial equation for control signal.
6.9 Maximum energy dissipation controller
Jansen and Dyke [176] proposed maximum energy dissipation controller for six story building using MR dampers and considered Lyapunov controller. Maximum Energy Dissipation Controller specialized for multi-input control system. The equation can be written as [255]
where, \(V\left(z\right)\) is Lyapunov function, \({||z||}_{p}=\) p norm of the state and P = real symmetric, positive define matrix.
6.9.1 Simple-passive control (SPC)
Zhang [258] proposed simple-passive control (SPC) system for seismic MR damper where zero-displacement positions are available. MR damper can cope with large control force with its zero-displacement position. The simple-passive controller formulation can be written as
where \({V}_{b}\), \(x\) are the control voltage to the ith MR damper and inter-story displacement. \({x}_{1}, {x}_{2},{ x}_{3}\), \({v}_{1}, {v}_{2}\) and \({v}_{3}\) are the design parameter which can be determined by optimization process.
6.9.2 Back-stepping control
Back-stepping control provides higher performance and accuracy which was proposed by Zapateiro et al. [259] for the vehicle suspension system. Primarily Back stepping Controller used Dahl model and a proposed Back-stepping Controller for seismic protection and vehicle neural network for MR dampers. The neural network can achieve inverse dynamics or reproduce using Back stepping Controller in the MR damper. A back-stepping technique-based MR damper is shown in Fig. 44 [260]. The control law is shown in Eqs. (53, 54, 55). The following equation can be written as

MR Damper [260]
where, \({\alpha }_{1}\), \({\alpha }_{2}\) are the angular position, \(F\) is the generated damping force, \({\omega }_{2}\) is the angular speed of the upper lever, \({V}_{b}\) is the control voltage and \(\overline{{k}_{x}}\), \({k}_{wa}\) and \({k}_{wb}\) are hysteresis loop controlling parameter.
6.9.3 Sliding mode controller
The sliding mode controller (Fig. 45) was used for driving the response trajectory along with a sliding surface [261] and particularly applied in nonlinear and hysteretic structures while several research group used for MR/ER dampers (Fig. 46) for seismic structures [262, 263]. The required equation can be written as

Schematic diagram of SSMC-based MR quarter-vehicle suspension system [264]

Schematic of MR damper [265]
\({x}_{s0}\) is sprung mass displacement, \({e}_{s}\) is sprung mass displacement error, \({x}_{s}\) is the vertical displacement and \(\Phi\) is convergence rate of sliding mode control.
6.9.4 Non-linear closed-loop controller
Kane et al. [266] proposed non-linear closed-loop controller for MR damper structures. The advantages of nonlinear controller over linear controller are controlling the dynamic force saturation limit and agent-based control structure. The control equation can be written as
where \(\underset{\_}{{W}_{j}}\left({Z}_{FZ}^{i}\right)=\prod_{i=1}^{n}{\mu }_{{p}_{i,j}}({Z}_{FZ}^{i})\) and \({\mu }_{{p}_{i,j}}({Z}_{FZ}^{i})\) is the grade of membership of \({Z}_{FZ}^{i}\) in \({P}_{i,j}\), \({A}_{j},{B}_{j}\) are system matrices and \(R\) is state vector.
6.9.5 A non-linear/adaptive control
A non-linear/adaptive control (Fig. 47) was proposed by Bitaraf et al. [267] after combining the study of simple adaptive control method [268] and genetic-based fuzzy control method. An adaptive control-based MR damper [269] for seat suspension is shown in Fig. 48. A nonlinear or adaptive controller can controlboth displacement, acceleration and response time effectively. Fuzzy logic control method is a combination of several control methods such as sliding mode and genetic algorithm control or combined method of fuzzy logic and neural network where neural network models [270] and black box model [271] are used. Fuzzy logic algorithm was proposed in civil structure [272,273,274,275] and MR dampers modeling [276,277,278,279]. Equation (59–62) shows the control law of the system. The equation are as follows:

Block diagram of adaptive control system [267]

MR Damper [269]
where, \({A}_{p}\) \({A}_{m}\) are state matrices, \({B}_{p}\), \({B}_{m}\) are input matrices, \({C}_{p}\), \({C}_{m}\) are the output matrices, \({R}_{p}\), \({R}_{m}\) are the n × 1 plant state vector \({n}_{m}\) × 1 model state vector, \({y}_{p}\) is plant output, \({y}_{m}\) is the model output, \({u}_{p}\) is the m × 1 input control vector, \({u}_{m}\) is the m × 1 input command vector and \({d}_{i}\) and \({d}_{o}\) are the input and output disturbances.
7 Conclusion
Large MR dampers have been developing for large vibration control systems. The review presents different structural design, mathematical models, their applications, classifications and different control system used for large MR dampers. Large MR dampers are developed by modifying the conventional MR dampers both in internal and external design structure. The main feature of a large MR damper over normal MR damper is its higher damping force and large frequency vibration control capability. The mono tube large MR damper with single ended and double ended structure are mostly developed over the years due to its cost-effectiveness and availability while the twin-tube large MR damper are less developed.
Among different mathematical model, the phenomenological bouc-wen model-based mono tube MR damper was mostly developed due to its fast response time, resistance to particle sedimentation, lower energy consumption and effective in both low and high frequency vibration control system. Whereas the Phenomenological Dhel friction model-based monotube large MR damper had more error in efficiency and not suitable for large scale MR damper modeling due to its high sedimentation, low magnetic flux distribution problems.
It is essential to react fast when subjected to large frequency vibration in case of large vibration mitigation. Large MR damper requires faster response time and better reliability for long-term large vibration control system. Among different control system the non-linear or adaptive control system was proved to be the most effective in case of better response, displacement and acceleration control. It is a combination of adaptive control and fuzzy control method which are used for many civil engineering applications where large damping force requires.
Change history
17 May 2022
A Correction to this paper has been published: https://doi.org/10.1007/s13367-022-00032-z
Abbreviations
- \(\dot{a}\) :
-
Acceleration
- a, b, c:
-
Damper characterization parameters
- \({A}_{e}\) :
-
Effective area of the piston
- \(a\) :
-
Velocity adjustment co-efficient of coulomb damping force
- \({A}_{p}\), \({A}_{m}\) :
-
State matrices
- \({B}_{p}\), \({B}_{m}\) :
-
Input matrices
- \({C}_{i}\) :
-
Damping coefficient
- \({C}_{\mathrm{post}}\) :
-
Post-yield damping
- \(c\) :
-
Viscous coefficients
- \({c}_{1}\) :
-
Pre-yield viscous
- \({c}_{k}\) :
-
Viscous damping for force roll off
- \({c}_{\mathrm{l}}\) :
-
Viscous damping at large velocities
- \({c}_{\mathrm{o}}\left(\dot{x}\right)\) :
-
Post yield plastic damping coefficient
- \({c}_{b}\) :
-
Roll off phenomenon of MR damper at low motion velocities
- \({c}_{\mathrm{max}}\) :
-
Maximum damping coefficients
- \({c}_{\mathrm{min}}\) :
-
Minimum damping coefficients
- \({C}_{p}\), \({C}_{m}\) :
-
Output matrices
- \({D}^{\mathrm{^{\prime}}}\) :
-
Mean diameter of the damping gap
- \({d}_{i}\) and \({d}_{o}\) :
-
Input and output disturbances
- \({e}_{s}\) :
-
Sprung mass displacement error
- \(F\) :
-
Damping force
- \({f}_{c}\) :
-
Frictional force
- \({F}_{\mathrm{post}}\) :
-
Post-yield damping force
- \({F}_{y}\) :
-
Yield force
- \({f}_{py}\) :
-
Positive or negative force
- \({F}_{\mathrm{pre}}\) :
-
Pre-yield damping force
- \({f}_{0}\) :
-
Damper force when the damper velocity is zero
- \({f}_{m}\) :
-
Damper force when the damper velocity is maximum
- \({f}_{d}\) :
-
Damper force offset
- \({F}_{c}\) :
-
Coulomb friction force
- \({F}_{d}\) :
-
Coulomb force
- \({F}_{\tau }\) :
-
Shear stress
- \({f}_{k}\) :
-
Damper force caused by seals and measurement bias
- \({F}_{\eta }\) :
-
Viscous stress
- \({F}_{b}\) :
-
Control force
- \(\mathrm{f}\) :
-
Measured force
- \(\mathrm{G}\) :
-
Influence vector
- \(\mathrm{g}\) :
-
Positive gain coefficient
- \(\mathrm{h}\) :
-
Heaviside step function
- \({\mathrm{H}}_{0}\) :
-
Strength of the magnetic field
- \(\mathrm{I}\) :
-
Current
- \(\mathrm{k}\) :
-
Stiffness coefficients
- \({k}_{\mathrm{l}}\) :
-
Stiffness at large velocities
- \({k}_{a}\) :
-
Accumulator stiffness
- \({k}_{s}\) :
-
Linear spring constant
- \({k}_{c}\) :
-
Consistency index
- \({K}_{c}\) :
-
Linear optimal controller
- \({k}_{1}\) :
-
Pre-yield stiffness
- \({k}_{H}\) :
-
Shape coefficient
- \(\overline{{k}_{x}}\), \({k}_{\mathrm{wa}}\) and \({k}_{\mathrm{wb}}\) :
-
Hysteresis loop controlling parameter
- \(\mathrm{l}\) :
-
Effective length of the piston
- L :
-
Laplace transform
- \(\mathrm{M}\) :
-
Mass
- \({m}_{0}\) :
-
Mass acceleration
- \(n\) :
-
Power law index
- \(N\left(t\right)\) :
-
Controllable contact force
- \({q}_{0},{q}_{1},{q}_{2},{q}_{3,} {r}_{o},{r}_{1},{r}_{2}\, \mathrm{and}\, {r}_{3}\) :
-
Optimal co-efficient of the polynomial equation for control signal
- \(R\) :
-
State vector.
- \({R}_{p}\),\({R}_{m}\) :
-
N × 1 plant state vector \({n}_{m}\) × 1 model state vector
- \(\Delta \left(t\right)\) :
-
Damping deformation
- \(u\) :
-
Dimensionless displacement
- \({\dot{u}}_{r}\) :
-
Relative velocity
- \({u}_{0}\) :
-
Harmonic motion with an amplitude
- \({u}_{a}\) :
-
Absolute displacement of the single degree of freedom
- \({u}_{p}\) :
-
M × 1 input control vector
- \({u}_{m}\) :
-
M × 1 input command vector
- \(V\left(z\right)\) :
-
Lyapunov function
- \({V}^{n}\) :
-
Velocity of the piston
- \({V}_{\mathrm{ref}}\) :
-
Reference velocity
- \({v}_{o}\) :
-
Input voltage to the current driver
- \({v}_{i}\) :
-
Measured noise vector
- \({V}_{\mathrm{max}}\) :
-
Maximum allowable voltage
- \({\omega }_{2}\) :
-
Angular speed of the upper lever
- \(\omega\) :
-
Frequency
- \(x\) :
-
Displacement of MR damper
- \({x}_{0}\) :
-
Displacement initial mass
- \({\dot{x}}_{0}\) :
-
Initial mass velocity
- \(\dot{x}\) :
-
Velocity
- \({x}_{i}\) :
-
Spring initial displacement
- \({\dot{x}}_{H}\) :
-
Hysteretic velocity
- \({x}_{c}\) :
-
Characteristics displacement
- \({x}_{v}\) :
-
Displacement value when damping force was zero
- \({x}_{s0}\) :
-
Sprung mass displacement
- \({x}_{s}\) :
-
Vertical displacement
- \({\dot{x}}_{t}^{+}or {\dot{x}}_{t}^{-}.\) :
-
Tangential curve velocity
- \({\ddot{x}}_{g}\) :
-
Ground acceleration
- \({y}_{p}\) :
-
Plant output
- \({y}_{m}\) :
-
Model output
- \({y}_{j}\) :
-
Measured output vector
- \({||z||}_{p}\) :
-
Norm of the state
- \(\alpha , \beta , \delta , \gamma ,n\) :
-
Model parameters
- \({a}_{1},{a}_{2},p\) :
-
Positive constants
- \(\eta\) :
-
Dynamical viscosity
- \({\tau }_{y}\) :
-
Yield shear stress
- \(\mu\) :
-
Coefficient of friction
- \({\alpha }_{1}\),\({\alpha }_{2}\) :
-
Angular position
- \({P}_{i,j}\), \({A}_{j},{B}_{j}\) :
-
System matrices
- \(\eta\) :
-
Dynamic viscosity of MR fluid
- \(\dot{\gamma }\) :
-
Strain rate
- Г:
-
Column vector
- λ:
-
Vector
- \(\Phi\) :
-
Convergence rate of sliding mode control
References
Rabinow J (1948) The magnetic fluid clutch. Electr Eng 67(12):1167–1167
Aziz MA, Embong AH, Rashid M, Saadeddin MS (2019) Design and material analysis of regenerative dispersion magnetorheological (MR) damper. Int J Recent Technol Eng 7(6s):304–307
Abu-Ein S, Fayyad S, Momani W, Al-Alawin A, Momani M (2010) Experimental investigation of using MR fluids in automobiles suspension systems. Res J Appl Sci Eng Technol 2(2):159–163
Schurter KC, Roschke PN (2000) Fuzzy modeling of a magnetorheological damper using ANFIS. Ninth IEEE Int Conf Fuzzy Syst 1:122–127
Weiss KD, Carlson JD, Nixon DA (1994) Viscoelastic properties of magneto-and electro-rheological fluids. J Intell Mater Syst Struct 5(6):772–775
Ginder J, Davis L, Elie L (1996) Rheology of magnetorheological fluids: models and measurements. Int J Mod Phys B 10(2324):3293–3303
Sonawane A, More C, Bhaskar SS (2016) A study of properties, preparation and testing of magneto-rheological (MR) fluid. Int J Innov Res Sci Technol 2(9):82–86
Hajalilou A, Mazlan SA, Shila ST (2016) Magnetic carbonyl iron suspension with Ni-Zn ferrite additive and its magnetorheological properties. Mater Lett 181:196–199
Choi K-M, Jung H-J, Cho S-W, Lee I-W (2007) Application of smart passive damping system using MR damper to highway bridge structure. J Mech Sci Technol 21(6):870–874
Xu ZD, Sha LF, Zhang XC, Ye HH (2013) Design, performance test and analysis on magnetorheological damper for earthquake mitigation. Struct Control Health Monit 20(6):956–970
Nguyen Q-H, Choi S-B (2009) Optimal design of MR shock absorber and application to vehicle suspension. Smart Mater Struct 18(3):035012
Wang T, Cheng H-B, Dong Z-C, Tam H-Y (2013) Removal character of vertical jet polishing with eccentric rotation motion using magnetorheological fluid. J Mater Process Technol 213(9):1532–1537
Li W, Kostidis K, Zhang X, Zhou Y (2009) Development of a force sensor working with MR elastomers. In: 2009 IEEE/ASME international conference on advanced intelligent mechatronics, IEEE, pp 233–238
Grunwald A, Olabi A-G (2008) Design of magneto-rheological (MR) valve. Sens Actuators A 148(1):211–223
Choi S-B, Lee S-K, Park Y-P (2001) A hysteresis model for the field-dependent damping force of a magnetorheological damper. J Sound Vib 245(2):375–383
Ashfak A, Saheed A, Rasheed KA, Jaleel JA (2011) Design, fabrication and evaluation of MR damper. Int J Aerosp Mech Eng 1:27–33
Chen C, Liao W-H (2012) A self-sensing magnetorheological damper with power generation. Smart Mater Struct 21(2):025014
Tseng HE, Hrovat D (2015) State of the art survey: active and semi-active suspension control. Veh Syst Dyn 53(7):1034–1062
Ebrahimi B, Khamesee MB, Golnaraghi F (2008) Eddy current damper feasibility in automobile suspension: modeling, simulation and testing. Smart Mater Struct 18(1):15017
Sherje N, Deshmukh DS (2016) Preparation and characterization of magnetorheological fluid for damper in automobile suspension. Int J Mech Eng Tech 7(4):75–84
Guo C, Gong X, Zong L, Peng C, Xuan S (2015) Twin-tube-and bypass-containing magneto-rheological damper for use in railway vehicles. Proc Instit Mech Eng Part F 229(1):48–57
Shin Y-J, You W-H, Hur H-M, Park J-H, Lee G-S (2014) Improvement of ride quality of railway vehicle by semiactive secondary suspension system on roller rig using magnetorheological damper. Adv Mech Eng 6:298382
Gandhi F, Wang K, Xia L (2001) Magnetorheological fluid damper feedback linearization control for helicopter rotor application. Smart Mater Struct 10(1):96
Powell LA, Hu W, Wereley NM (2013) Magnetorheological fluid composites synthesized for helicopter landing gear applications. J Intell Mater Syst Struct 24(9):1043–1048
Choi K, Jung H, Cho S, Lee I-W (2006) Application of smart passive damping system using MR damper to highway bridge benchmark problem. In: Proceedings of 8th international conference on motion and vibration control (MOVIC 2006)
Lee H-J, Moon S-J, Jung H-J, Huh Y-C, Jang D-D (2008) "Integrated design method of MR damper and electromagnetic induction system for structural control. Sens Smart Struct Technol Civil Mech Aerosp Syst 6932:69320S
Jang D-D, Jung H-J, Lee H-J (2011) Investigation of structural response reduction performance of smart passive system using real-time hybrid simulation. Adv Sci Lett 4(3):681–685
Maślanka M, Sapiński B, Snamina J (2007) Experimental study of vibration control of a cable with an attached MR damper. J Theor Appl Mech 45:893–917
Cai C, Wu W, Araujo M (2007) Cable vibration control with a TMD-MR damper system: Experimental exploration. J Struct Eng 133(5):629–637
Han C, Kim B-G, Choi S-B (2018) Design of a new magnetorheological damper based on passive oleo-pneumatic landing gear. J Aircr 55(6):2510–2520
Choi S, Han S, Han Y, Thompson B (2007) A magnification device for precision mechanisms featuring piezoactuators and flexure hinges: design and experimental validation. Mech Mach Theory 42(9):1184–1198
Desai RM, Jamadar MEH, Kumar H, Joladarashi S, Rajasekaran S, Amarnath G (2019) Evaluation of a commercial MR damper for application in semi-active suspension. SN Appl Sci 1(9):1–10
Du X, Yu M, Fu J, Huang C (2020) Experimental study on shock control of a vehicle semi-active suspension with magneto-rheological damper. Smart Mater Struct 29(7):002
Ulasyar A, Lazoglu I (2018) Design and analysis of a new magneto rheological damper for washing machine. J Mech Sci Technol 32(4):1549–1561
Bui DQ, Diep BT, Dai HL, Hoang LV, Nguyen QH (2019) "Hysteresis investigation of shear-mode MR damper for front-loaded washing machine. Appl Mech Mater 889:361–370
Seid S, Chandramohan S, Sujatha S (2018) Optimal design of an MR damper valve for prosthetic knee application. J Mech Sci Technol 32(6):2959–2965
Tak RSS, Kumar H, Chandramohan S, Srinivasan S (2019) Design of twin-rod flow mode magneto rheological damper for prosthetic knee application. AIP Conf Proceedings 2200(1):020045
Mcnamara RJ, Taylor DP (2003) Fluid viscous dampers for high-rise buildings. Struct Design Tall Spec Build 12(2):145–154
Lin WH, Chopra AK (2002) Earthquake response of elastic SDF systems with non-linear fluid viscous dampers. Earthquake Eng Struct Dyn 31(9):1623–1642
Zhang R-H, Soong T (1992) Seismic design of viscoelastic dampers for structural applications. J Struct Eng 118(5):1375–1392
Shen K, Soong T (1995) Modeling of viscoelastic dampers for structural applications. J Eng Mech 121(6):694–701
Skinner R, Tyler R, Heine A, Robinson W (1980) Hysteretic dampers for the protection of structures from earthquakes. Bull N Z Soc Earthq Eng 13(1):22–36
Skinner R, Kelly JM, Heine A (1974) Hysteretic dampers for earthquake-resistant structures. Earthquake Eng Struct Dyn 3(3):287–296
Sarwar W, Sarwar R (2019) Vibration control devices for building structures and installation approach: a review. Civil Environ Eng Rep 29(2):74–100
Sodeyama H, Suzuki K, Sunakoda K (2004) Development of large capacity semi-active seismic damper using magneto-rheological fluid. J Press Vessel Technol 126(1):105–109
Spencer B Jr, Nagarajaiah S (2003) State of the art of structural control. J Struct Eng 129(7):845–856
Fujitani H et al (2003) Development of 400kN magnetorheological damper for a real base-isolated building. Smart Struct Mater 5052:265–276
Ou J (2003) Structural Vibration control-active, semi-active and smart control. Press of Science, Beijings
Qu W-L et al (2009) Intelligent control for braking-induced longitudinal vibration responses of floating-type railway bridges. Smart Mater Struct 18(12):125003
Yang G, Spencer BF Jr, Jung H-J, Carlson JD (2004) Dynamic modeling of large-scale magnetorheological damper systems for civil engineering applications. J Eng Mech 130(9):1107–1114
Phillips BM et al (2010) Real-time hybrid simulation benchmark study with a large-scale MR damper. In: Proceedings of the 5th WCSCM, pp 12–14
Tu J, Liu J, Qu W, Zhou Q, Cheng H, Cheng X (2011) Design and fabrication of 500-kN large-scale MR damper. J Intell Mater Syst Struct 22(5):475–487
Friedman A, Dyke S, Phillips B (2013) Over-driven control for large-scale MR dampers. Smart Mater Struct 22(4):045001
Heo G, Kim C, Jeon S, Lee C, Seo S (2017) A study on a MR damping system with lumped mass for a two-span bridge to diminish its earthquake-induced longitudinal vibration. Soil Dyn Earthq Eng 92:312–329
Heo G, Kim C (2017) A hybrid seismic response control to improve performance of a two-span bridge. Struct Eng Mech 61(5):675–684
Spencer B Jr, Dyke S, Sain M, Carlson J (1997) Phenomenological model for magnetorheological dampers. J Eng Mech 123(3):230–238
El-Khoury O, Kim C, Shafieezadeh A, Hur J, Heo G (2015) Experimental study of the semi-active control of a nonlinear two-span bridge using stochastic optimal polynomial control. Smart Mater Struct 24(6):065011
Javadinasab-Hormozabad S, Zahrai S (2019) Innovative adaptive viscous damper to improve seismic control of structures. J Vib Control 25(12):1833–1851
Miah MS, Chatzi EN, Dertimanis VK, Weber F (2017) Real-time experimental validation of a novel semi-active control scheme for vibration mitigation. Struct Control Health Monit 24(3):e1878
Yeganeh Fallah A, Attari NKA (2017) Robust control of seismically excited cable stayed bridges with MR dampers. Smart Mater Struct 26(3):035056
Bathaei A, Ramezani M, Ghorbani-Tanha AK (2017) Type-1 and Type-2 fuzzy logic control algorithms for semi-active seismic vibration control of the college urban bridge using MR dampers. Civil Eng Infrastruct J 50(2):333–351
Hormozabad SJ, Ghorbani-Tanha AK (2020) Semi-active fuzzy control of Lali Cable-Stayed Bridge using MR dampers under seismic excitation. Front Struct Civ Eng 14(3):706–721
Bathaei A, Zahrai SM, Ramezani M (2018) Semi-active seismic control of an 11-DOF building model with TMD+ MR damper using type-1 and-2 fuzzy algorithms. J Vib Control 24(13):2938–2953
Bozorgvar M, Zahrai SM (2019) Semi-active seismic control of buildings using MR damper and adaptive neural-fuzzy intelligent controller optimized with genetic algorithm. J Vib Control 25(2):273–285
Bhaiya V, Bharti S, Shrimali M, Datta T (2019) Performance of semi-actively controlled building frame using mr damper for near-field earthquakes. Recent advances in structural engineering, volume 2. Springer, Berlin, pp 397–407
Fu W, Zhang C, Li M, Duan C (2019) Experimental investigation on semi-active control of base isolation system using magnetorheological dampers for concrete frame structure. Appl Sci 9(18):3866
Gong W, Xiong S, Tan P (2019) Experimental and numerical studies on pseudo-negative-stiffness control of a base isolated building using magneto-rheological dampers. Smart Mater Struct 28(10):105020
Cruze D, Gladston H, Farsangi EN, Banerjee A, Loganathan S, Solomon SM (2021) Seismic performance evaluation of a recently developed magnetorheological damper: experimental investigation. Pract Period Struct Des Constr 26(1):04020061
Amezquita-Sanchez JP, Valtierra-Rodriguez M, Aldwaik M, Adeli H (2016) Neurocomputing in civil infrastructure. Sci Iran 23(6):2417–2428
Salehi H, Burgueño R, Chakrabartty S, Lajnef N, Alavi AH (2021) A comprehensive review of self-powered sensors in civil infrastructure: State-of-the-art and future research trends. Eng Struct 234:111963
Gad AS, El-Zoghby H, Oraby W, El-Demerdash SM (2019) Application of a preview control with an mr damper model using genetic algorithm in semi-active automobile suspension. SAE Technical Paper 0148–7191
Kabariya U, James S (2020) Study on an energy-harvesting magnetorheological damper system in parallel configuration for lightweight battery-operated automobiles. Vibration 3(3):162–173
Jin S et al (2021) A smart passive MR damper with a hybrid powering system for impact mitigation: an experimental study. J Intell Mater Syst Struct 32:1452–1461
Li Z, Gong Y, Wang J (2019) Optimal control with fuzzy compensation for a magnetorheological fluid damper employed in a gun recoil system. J Intell Mater Syst Struct 30(5):677–688
Muthalif AG, Kasemi HB, Nordin ND, Rashid M, Razali MKM (2017) Semi-active vibration control using experimental model of magnetorheological damper with adaptive F-PID controller. Smart Struct Syst 20(1):85–97
Maciejewski I, Krzyżyński T, Pecolt S, Chamera S (2019) Semi-active vibration control of horizontal seat suspension by using magneto-rheological damper. J Theor Appl Mech 57:411–420
Bai X-X, Jiang P, Qian L-J (2017) Integrated semi-active seat suspension for both longitudinal and vertical vibration isolation. J Intell Mater Syst Struct 28(8):1036–1049
Kim H-C, Shin Y-J, You W, Jung KC, Oh J-S, Choi S-B (2017) A ride quality evaluation of a semi-active railway vehicle suspension system with MR damper: railway field tests. Proc Instit Mech Eng Part F 231(3):306–316
Sharma SK, Kumar A (2017) Ride performance of a high speed rail vehicle using controlled semi active suspension system. Smart Mater Struct 26(5):5026
Saleh M, Sedaghati R, Bhat R (2018) Dynamic analysis of an SDOF helicopter model featuring skid landing gear and an MR damper by considering the rotor lift factor and a Bingham number. Smart Mater Struct 27(6):65013
Jiang M, Rui X, Zhu W, Yang F, Zhang Y (2021) Design and control of helicopter main reducer vibration isolation platform with magnetorheological dampers. Int J Mech Mater Des 17:345–366
Zhang G, Wang H, Wang J (2018) Development and dynamic performance test of magnetorheological material for recoil of gun. Appl Phys A 124(11):1–11
Patel DM, Upadhyay RV (2018) Predicting the thermal sensitivity of MR damper performance based on thermo-rheological properties. Mater Res Express 6(1):5707
Dantas CP, de Matos Gabriel FM, da Costa Neto RT (2018) Influence of the distances between the axles in the vertical dynamics of a military vehicle equipped with magnetorheological dampers. SAE Technical Paper 0148–7191
Ahamed R, Choi S-B, Ferdaus MM (2018) A state of art on magneto-rheological materials and their potential applications. J Intell Mater Syst Struct 29(10):2051–2095
Wang D, Zi B, Qian S, Qian J (2017) Steady-state heat-flow coupling field of a high-power magnetorheological fluid clutch utilizing liquid cooling. J Fluids Eng. https://doi.org/10.1115/1.4037171
Pisetskiy S, Kermani MR (2020) A concept of a miniaturized MR clutch utilizing MR fluid in squeeze mode. In: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, pp 6347–6352
Deng Z, Yang Q, Yang X (2020) Optimal design and experimental evaluation of magneto-rheological mount applied to start/stop mode of vehicle powertrain. J Intell Mater Syst Struct 31(8):1126–1137
Xin F-L, Bai X-X, Qian L-J (2017) Principle, modeling, and control of a magnetorheological elastomer dynamic vibration absorber for powertrain mount systems of automobiles. J Intell Mater Syst Struct 28(16):2239–2254
Gürgen S, Sert A (2019) Polishing operation of a steel bar in a shear thickening fluid medium. Compos Part B 175:107127
Sapiński B, Snamina J (2017) Automotive vehicle engine mount based on an MR squeeze-mode damper: modeling and simulation. J Theor Appl Mech. https://doi.org/10.15632/jtam-pl.55.1.377
Chen S, Li R, Du P, Zheng H, Li D (2019) Parametric modeling of a magnetorheological engine mount based on a modified polynomial bingham model. Front Mater 6:68
Weber F, Distl H, Fischer S, Braun C (2016) MR damper controlled vibration absorber for enhanced mitigation of harmonic vibrations. Actuators 5(4):27
Mikhailov V, Bazinenkov A, Dolinin P, Stepanov G (2018) Research on the dynamic characteristics of a controlled magnetorheological elastometer damper. Instrum Exp Techn 61(3):427–432
Ren C, Bayin Q, Feng S, Fu Y, Ma X, Guo J (2020) Biomarkers detection with magnetoresistance-based sensors. Biosens Bioelectron 165:112340
Migus M et al (2020) Measurements of shear stress in ER/MR fluids used in valves by adapting centrifugal force. Smart Mater Struct 29(7):077002
Bahiuddin I, Mazlan S, Imaduddin-Ubaidillah F, Ichwan B (2016) Magnetorheological valve based actuator for improvement of passively controlled turbocharger system. AIP Conf Proc 1717(1):030007
Hui Y, Tao Y, Xiang B, Zhao Y-L, Yang DS, Jiang HY (2016) Contact stress analysis of metal rubber seals based on finite element. Destech Trans Mater Sci Eng. https://doi.org/10.12783/dtmse/ammme2016/6902
Kubík M, Pavlíček D, Macháček O, Strecker Z, Roupec J (2019) A magnetorheological fluid shaft seal with low friction torque. Smart Mater Struct 28(4):047002
Lee T-H, Shin S-U, Cha S-W, Choi S-B (2019) Fine position control of a vehicle maintenance lift system using a hydraulic unit activated by magnetorheological valves. J Intell Mater Syst Struct 30(6):896–907
Liem DT, Ahn KK (2016) Adaptive semi-parallel position/force-sensorless control of electro-hydraulic actuator system using MR fluid damper. Int J Precis Eng Manuf 17(11):1451–1463
Ramamoorthy M, Rajamohan V, Jeevanantham AK (2016) Vibration analysis of a partially treated laminated composite magnetorheological fluid sandwich plate. J Vib Control 22(3):869–895
Naji J, Zabihollah A, Behzad M (2016) Layerwise theory in modeling of magnetorheological laminated beams and identification of magnetorheological fluid. Mech Res Commun 77:50–59
Lara-Prieto V, Parkin R, Jackson M, Silberschmidt V, Kęsy Z (2009) Vibration characteristics of MR cantilever sandwich beams: experimental study. Smart Mater Struct 19(1):5005
Bolat FC, Sivrioglu S (2018) Active control of a small-scale wind turbine blade containing magnetorheological fluid. Micromachines 9(2):80
Karabulut MG, Dede M (2018) Design and experimental validation of an MR-fluid based brake for use in haptics. In: ACTUATOR 2018; 16th International Conference on New Actuators, pp 1–5
Jinaga R, Thimmaiah J, Kolekar S, Choi S-B (2019) Design, fabrication and testing of a magnetorheologic fluid braking system for machine tool application. SN Appl Sci 1(4):1–12
Ganesha A, Patil S, Kumar N, Murthy A (2020) Magnetic field enhancement technique in the fluid flow gap of a single coil twin tube Magnetorheological damper using magnetic shields. J Mech Eng Sci 14(2):6679–6689
Hu G, Liu F, Xie Z, Xu M (2016) Design, analysis, and experimental evaluation of a double coil magnetorheological fluid damper. Shock Vib. https://doi.org/10.1155/2016/4184726
Kikuchi T, Kobayashi K (2011) Design and development of cylindrical MR fluid brake with multi-coil structure. J Syst Des Dyn 5(7):1471–1484
Seid S, Chandramohan S, Sujatha S (2018) Design evaluation of a mono-tube magnetorheological (MR) damper valve. Innovative design, analysis and development practices in aerospace and automotive engineering (I-DAD). Springer, Berlin, pp 145–151
Ashfak A, Saheed A, Rasheed K, Jaleel J (2011) Design, fabrication and evaluation of MR damper, vol. 1, pp. 27–33
Avinash B, Sundar SS, Gangadharan K (2014) Experimental study of damping characteristics of air, silicon oil, magneto rheological fluid on twin tube damper. Proced Mater Sci 5:2258–2262
Ebrahimi B, Khamesee MB, Golnaraghi F (2009) Design of a hybrid electromagnetic/hydraulic damper for automotive suspension systems. In: 2009 International Conference on Mechatronics and Automation, IEEE, pp 3196–3200
Poynor JC (2001) Innovative designs for magneto-rheological dampers. Virginia Tech
Ahamed R, Rashid M, Ferdaus M, Yusuf HB (2017) Modelling and performance evaluation of energy harvesting linear magnetorheological (MR) damper. J Low Freq Noise Vib Active Control 36(2):177–192
Ashfak A, Saheed A, Rasheed KA, Jaleel JA (2011) Design, fabrication and evaluation of MR damper. Development 3191:9458
Sohn JW, Oh J-S, Choi S-B (2015) Design and novel type of a magnetorheological damper featuring piston bypass hole. Smart Mater Struct 24(3):5013
Hong H, Tang S, Sheng Y, Cui Q (2015) Magnetic circuit design and computation of a magnetorheological damper with exterior coil. In: 2015 IEEE international conference on mechatronics and automation (ICMA), IEEE, pp 60–64
Yazid I, Mazlan SA, Kikuchi T, Zamzuri H, Imaduddin F (2014) Magnetic circuit optimization in designing magnetorheological damper. Smart Struct Syst 14(5):869–881
Yazid IIM, Mazlan SA, Kikuchi T, Zamzuri H, Imaduddin FJM (2014) Design of magnetorheological damper with a combination of shear and squeeze modes. Mater Des 54:87–95
Hu G, Liu H, Duan J, Yu L (2019) Damping performance analysis of magnetorheological damper with serial-type flow channels. Adv Mech Eng 11(1):1687814018816842
Chae Y, Ricles JM, Sause R (2014) Large-scale real-time hybrid simulation of a three-story steel frame building with magneto-rheological dampers. Earthq Eng Struct Dynam 43(13):1915–1933
Gong X, Ruan X, Xuan S, Yan Q, Deng H (2014) Magnetorheological damper working in squeeze mode. Adv Mech Eng 6:410158
Bai X-X, Wereley NM, Hu W (2015) Maximizing semi-active vibration isolation utilizing a magnetorheological damper with an inner bypass configuration. J Appl Phys 117(17):17C711
Bai X-X, Shen S, Cai F-L, Deng X-C, Xu S-X (2018) Mechanical responses of a magnetorheological damper. Active Passive Smart Struct Integr Syst 10595:1059507
Yazid IIM, Mazlan SA, Kikuchi T, Zamzuri H, Imaduddin F (2014) Design of magnetorheological damper with a combination of shear and squeeze modes. Mater Des 1980–2015(54):87–95
Rashid M, Aziz MA, Khan MR (2017) An experimental design of bypass magneto-rheological (MR) damper. IOP Conf Ser 260(1):012021
Sun Q, Zhang L, Zhou J, Shi QJEE (2003) Experimental study of the semi-active control of building structures using the shaking table. Earthq Eng Struct Dyn 32(15):2353–2376
Gordaninejad F, Wang X, Hitchcock G, Bangrakulur K, Ruan S, Siino MJJOSE (2010) Modular high-force seismic magneto-rheological fluid damper. J Struct Eng 136(2):135–143
Imaduddin F, Mazlan SA, Idris MH, Bahiuddin IJJOKSU-S (2017) "Characterization and modeling of a new magnetorheological damper with meandering type valve using neuro-fuzzy. J King Saud Univer Sci 29(4):468–477
Jacquot J (2017) Damper and awe: 6 types of automotive dampers explained. https://www.caranddriver.com
Corporation L (2019) Products and solutions. https://www.lord.com
Berasategui J, Elejabarrieta M, Bou-Ali M (2014) Characterization analysis of a MR damper. Smart Mater Struct 23(4):045025
Yao G, Yap F, Chen G, Li W, Yeo S (2002) MR damper and its application for semi-active control of vehicle suspension system. Mechatronics 12(7):963–973
Yang B, Zhang A, Bai Y, Zhang K, Li H (2018) Development and simulation of magnetorheological damper for segment erector vibration control. Trans Can Soc Mech Eng 43(2):237–247
Berasategui J, Gomez A, Martinez-Agirre M, Elejabarrieta MJ, Bou-Ali MM (2018) Magnetorheological damper behaviour in accordance with flow mode. Eur Phys J Appl Phys 84(2):21101
Hadidi A, Azar BF, Shirgir S (2019) Reliability assessment of semi-active control of structures with MR damper. Earthq Struct 17(2):131–141
Huang H, Liu T, Sun L (2019) Multi-mode cable vibration control using MR damper based on nonlinear modeling. Smart Struct Syst 23(6):565–577
Meng F, Zhou J, Jin C, Ji W (2019) Modeling and experimental verification of a squeeze mode magnetorheological damper using a novel hysteresis model. Proc Inst Mech Eng C J Mech Eng Sci 233(15):5253–5263
Meng F, Zhou J (2019) Modeling and control of a shear-valve mode MR damper for semiactive vehicle suspension. Math Probl Eng. https://doi.org/10.1155/2019/2568185
Madhavrao Desai R, Acharya S, Jamadar M-E-H, Kumar H, Joladarashi S, Sekaran SR (2020) Synthesis of magnetorheological fluid and its application in a twin-tube valve mode automotive damper. Proc Instit Mech Eng Part 234(7):1001–1016
Acharya S, Saini TRS, Kumar H (2019) Determination of optimal magnetorheological fluid particle loading and size for shear mode monotube damper. J Braz Soc Mech Sci Eng 41(10):1–15
Zeinali M, Mazlan SA, Choi S-B, Imaduddin F, Hamdan LH (2016) Influence of piston and magnetic coils on the field-dependent damping performance of a mixed-mode magnetorheological damper. Smart Mater Struct 25(5):055010
Hong S, Wereley N, Choi Y, Choi S (2008) Analytical and experimental validation of a nondimensional Bingham model for mixed-mode magnetorheological dampers. J Sound Vib 312(3):399–417
Alghamdi A, Olabi A (2012) Novel design concept of magnetorheological damper in squeeze mode. In: International Conference on Experimental Mechanics
Rahman M, Ong ZC, Julai S, Ferdaus MM, Ahamed R (2017) A review of advances in magnetorheological dampers: their design optimization and applications. J Zhejiang Univ Sci A 18(12):991–1010
Gao F, Liu Y-N, Liao W-H (2017) Optimal design of a magnetorheological damper used in smart prosthetic knees. Smart Mater Struct 26(3):035034
Liu YL, Peng ZZ, Gao YQ, Yue J (2011) Design and Analysis of MR Damper with Radial Duct for Tracked Vehicle Suspension. Adv Mater Res 311:2245–2250
Ding Y, Zhang L, Zhu H-T, Li Z-X (2013) A new magnetorheological damper for seismic control. Smart Mater Struct 22(11):115003
Zhao Z et al (2019) Studies on application of scissor-jack braced viscous damper system in wind turbines under seismic and wind loads. Eng Struct 196:109294
Ichwan B, Mazlan S, Imaduddin F, Koga T, Idris MJSM (2016) Development of a modular MR valve using meandering flow path structure. Smart Mater Struct 25(3):7001
Strecker Z, Roupec J, Mazůrek I, Macháček O, Kubík M (2018) Influence of response time of magnetorheological valve in Skyhook controlled three-parameter damping system. Adv Mech Eng 10(11):1687814018811193
Imaduddin F, Mazlan SA, Zamzuri H, Yazid IIM (2015) Design and performance analysis of a compact magnetorheological valve with multiple annular and radial gaps. J Intell Mater Syst Struct 26(9):1038–1049
Kim H-S, Kang J-W (2017) Smart outrigger damper system for response reduction of tall buildings subjected to wind and seismic excitations. Int J Steel Struct 17(4):1263–1272
El-Khoury O, Kim C, Shafieezadeh A, Hur JE, Heo GH (2018) Mitigation of the seismic response of multi-span bridges using MR dampers: experimental study of a new SMC-based controller. J Vib Control 24(1):83–99
Gasparini G, Palermo M, Ponzo F, Sorace S, Lavan O (2018) energy dissipation systems for seismic vibration-induced damage mitigation in building structures: development, modeling, analysis, and design. Shock Vib 2018:4791641
Ji H, Huang Y, Nie S, Yin F, Dai Z (2020) Research on semi-active vibration control of pipeline based on magneto-rheological damper. Appl Sci 10(7):2541
Wang ZH, Xu YW, Gao H, Chen ZQ, Xu K, Zhao SB (2019) Vibration control of a stay cable with a rotary electromagnetic inertial mass damper. Smart Struct Syst 23:627–639
Yoshida S, Fujitani H, Mukai Y, Ito MJJAR (2018) "Real-time hybrid simulation of semi-active control using shaking table: proposal and verification of a testing method for mid-story isolated buildings. Jpn Archit Rev 1(2):221–234
Braz-César M, Barros R (2012) Experimental behaviour and numerical analysis of dampers MR dampers. In: The Fifthteenth World Conference on Earthquake Engineering
Zhou Q (2002) Two mechanic models for magneto-rheological damper and corresponding test verification. Earthq Eng Eng Vib 22(4):144–150
Gamota D, Filisko FE (1991) Dynamic mechanical studies of electrorheological materials: moderate frequencies. J Rheol 35(3):399–425
Occhiuzzi A, Spizzuoco M, Serino GJSM (2003) Experimental analysis of magnetorheological dampers for structural control. Smart Mater Struct 12(5):703
Lee D-Y, Wereley NM (2000) Analysis of electro-and magneto-rheological flow mode dampers using Herschel-Bulkley model. Smart Mater Struct 3989:244–255
Stanway R, Sproston J, El-Wahed AJSM (1996) Applications of electro-rheological fluids in vibration control: a survey. Smart Mater Struct 5(4):464
Wereley NM, Pang L, Kamath GM (1998) Idealized hysteresis modeling of electrorheological and magnetorheological dampers. J Intell Mater Syst Struct 9(8):642–649
Ang WL, Li WH, Du H (2004) Experimental and modeling approach of a MR damper performance under harmonic loading. J Instit Eng 44(4):1–4
Sims ND, Peel DJ, Stanway R, Johnson AR, Bullough WA (2000) The electrorheological long-stroke damper: a new modelling technique with experimental validation. J Sound Vib 229(2):207–227
Sims ND, Holmes NJ, Stanway R (2003) A unified modelling and model updating procedure for electrorheological and magnetorheological vibration dampers. Smart Mater Struct 13(1):100
Hu W, Wereley NM (2008) Hybrid magnetorheological fluid–elastomeric lag dampers for helicopter stability augmentation. Smart Mater Struct 17(4):045021
Li WH, Yao GZ, Chen G, Yeo SH, Yap FF (2000) Testing and steady state modeling of a linear MR damper under sinusoidal loading. Smart Mater Struct 9(1):95
Wereley NM, Kamath GM, Madhavan V (1999) Hysteresis modeling of semi-active magnetorheological helicopter dampers. J Intell Mater Syst Struct 10(8):624–633
Makris N, Burton SA, Taylor DP (1996) Electrorheological damper with annular ducts for seismic protection applications. Smart Mater Struct 5(5):551
Chae Y, Ricles JM, Sause R (2010) Development of a large-scale MR damper model for seismic hazard mitigation assessment of structures. In: Proceedings of the 9th US National and 10th Canadian conference on earthquake engineering. Toronto, Canada
Jansen LM, Dyke SJ (2000) Semiactive control strategies for MR dampers: comparative study. J Eng Mech 126(8):795–803
Yi F, Dyke SJ, Caicedo JM, Carlson JD (2001) Experimental verification of multiinput seismic control strategies for smart dampers. J Eng Mech 127(11):1152–1164
Dominguez A, Sedaghati R, Stiharu I (2004) Modelling the hysteresis phenomenon of magnetorheological dampers. Smart Mater Struct 13(6):1351
Dominguez A, Sedaghati R, Stiharu I (2006) A new dynamic hysteresis model for magnetorheological dampers. Smart Mater Struct 15(5):1179
Dominguez A, Sedaghati R, Stiharu I (2008) Modeling and application of MR dampers in semi-adaptive structures. Comput Struct 86(3–5):407–415
Kwok NM, Ha QP, Nguyen MT, Li J, Samali B (2007) Bouc-Wen model parameter identification for a MR fluid damper using computationally efficient GA. ISA Trans 46(2):167–179
Ikhouane F, Dyke SJ (2007) Modeling and identification of a shear mode magnetorheological damper. Smart Mater Struct 16(3):605
Jiménez R, Álvarez-Icaza L (2005) LuGre friction model for a magnetorheological damper. Struct Control Health Monit 12(1):91–116
Jimnez R, Alvarez L (2002) Real time identification of structures with magnetorheological dampers. Proc IEEE Conf Decis Control 1:1017–1022
Sakai C, Ohmori H, Sano A (2003) Modeling of MR damper with hysteresis for adaptive vibration control. IEEE Int Conf Decis Control 4:3840–3845
Terasawa T, Sakai C, Ohmori H, Sano A (2004) Adaptive identification of MR damper for vibration control. IEEE Conf Decis Control (CDC) 3:2297–2303
Kwok N, Ha Q, Nguyen T, Li J, Samali B (2006) A novel hysteretic model for magnetorheological fluid dampers and parameter identification using particle swarm optimization. Sens Actuators A 132(2):441–451
Wang ER, Ma XQ, Rakhela S, Su CY (2003) Modelling the hysteretic characteristics of a magnetorheological fluid damper. Proc Instit Mech Eng Part D. 217(7):537–550
Oh H-U, Onoda JJSM (2002) An experimental study of a semiactive magneto-rheological fluid variable damper for vibration suppression of truss structures. Smart Mater Struct 11(1):156
Falk F, Konopka P (1990) "Three-dimensional Landau theory describing the martensitic phase transformation of shape-memory alloys. J Phys 2(1):61
Matus P, Melnik RV, Wang L, Rybak I (2004) Applications of fully conservative schemes in nonlinear thermoelasticity: modelling shape memory materials. Math Comput Simul 65(4–5):489–509
Lookman T, Shenoy SR, Rasmussen K, Saxena A, Bishop AR (2003) Ferroelastic dynamics and strain compatibility. Phys Rev B 67(2):024114
Carlson JD (1996) Magneto-rheological fluid dampers for semi-active seismic control. In: Proceedings of 3rd International Conference on Motion and Vibration Control, Chiba, Japan, no. 3, pp 35–40
Sodeyama H, Sunakoda K, Fujitani H, Soda S, Iwata N, Hata K (2003) Dynamic tests and simulation of magneto–rheological dampers. Comput-Aided Civil Infrastruct Eng 18(1):45–57
Structure H (2021) Structural and fire engineering. https://www.holmes.us/
Engco (2021). Product engineering. https://www.engco.co.nz/
Kye S, Jung HJ, Jung HY (2019) Experimental investigation on a cable structure equipped with an electrodynamic damper and its monitoring strategy through energy harvesting. Sensors 19(11):2631
Stanway R, Sproston J, Stevens N (1987) Non-linear modelling of an electro-rheological vibration damper. J Electrostat 20(2):167–184
Xu Z-D, Shen Y-P, Guo Y-Q (2003) Semi-active control of structures incorporated with magnetorheological dampers using neural networks. Smart Mater Struct 12(1):80
Chae Y, Ricles JM, Sause R (2013) Modeling of a large-scale magneto-rheological damper for seismic hazard mitigation. Part II: Semi-active mode. Earthquake Eng Struct Dynam 42(5):687–703
Herschel W, Bulkley R (1926) Konsistenzmessungen von gummibenzollosungen. Kolloid-Z 39(4):291–300
Gavin HP (2001) Multi-duct ER dampers. J Intell Mater Syst Struct 12(5):353–366
Bass BJ, Christenson RE (2007) System identification of a 200 kN magneto-rheological fluid damper for structural control in large-scale smart structures. In: 2007 American Control Conference, pp 2690–2695
Jiang Z, Christenson R (2011) A comparison of 200 kN magneto-rheological damper models for use in real-time hybrid simulation pretesting. Smart Mater Struct 20(6):5011
Yang M-G, Cai C (2016) Longitudinal vibration control for a suspension bridge subjected to vehicle braking forces and earthquake excitations based on magnetorheological dampers. J Vib Control 22(17):3659–3678
Hurlebaus S, Stocks T, Ozbulut OE (2012) Smart structures in engineering education. J Profess Issues Eng Educ Pract 138(1):86–94
Li Z-X, Xu L-H (2005) Performance tests and hysteresis model of MRF-04K damper. J Struct Eng 131(8):1303–1306
Li Z-X, Chen Y, Shi Y-D (2016) Seismic damage control of nonlinear continuous reinforced concrete bridges under extreme earthquakes using MR dampers. Soil Dyn Earthq Eng 88:386–398
Yang G, Spencer B Jr, Carlson J, Sain M (2002) Large-scale MR fluid dampers: modeling and dynamic performance considerations. Eng Struct 24(3):309–323
Corporation ST (2020) Buildings and detached houses MR dampers. https://www.tekki.co.jp
Homeland Security News (2011) Shock absorbers making building earthquake-proof. https://www.homelandsecuritynewswire.com
Weber F, Feltrin G, Huth OJ (2006) Swiss federal laboratories for material testing, and D. Research, Switzerland. Guidel Struct Control
Ni Y, Ko J, Chen Z, Spencer B (2002) Lessons learned from application of semi-active MR dampers to bridge cables for wind-rain-induced vibration control. China-Japan workshop on vibration control and health monitoring of structures
Cha Y, Agrawal A, Dyke S (2012) Time delay effects on large-scale MR damper based semi-active control strategies. Smart Mater Struct 22(1):5011
Cha Y-J, Agrawal AK (2016) Robustness studies of sensor faults and noises for semi-active control strategies using large-scale magnetorheological dampers. J Vib Control 22(5):1228–1243
Bahar A, Pozo F, Acho L, Rodellar J, Barbat A (2010) Parameter identification of large-scale magnetorheological dampers in a benchmark building. Comput Struct 88(3–4):198–206
Bahar A, Pozo F, Acho L, Rodellar J, Barbat A (2009) Parameter identification of large-scale magnetorheological dampers in a benchmark building platform. In: 2009 European Control Conference (ECC), pp 496–501
Dyke S, Spencer B Jr, Sain M, Carlson J (1998) An experimental study of MR dampers for seismic protection. Smart Mater Struct 7(5):693
Rodríguez A, Pozo F, Bahar A, Acho L, Vidal Y, Rodellar J (2012) Force-derivative feedback semi-active control of base-isolated buildings using large-scale MR fluid dampers. Struct Control Health Monit 19(1):120–145
Zapateiro M, Karimi H, Luo N, Spencer B Jr (2010) Real-time hybrid testing of semiactive control strategies for vibration reduction in a structure with MR damper. Struct Control Health Monit 17(4):427–451
Kori JG, Jangid R (2009) Semi-active MR dampers for seismic control of structures. Bull N Z Soc Earthq Eng 42(3):157–166
Shrimali M, Bharti S, Dumne S (2015) Seismic response analysis of coupled building involving MR damper and elastomeric base isolation. Ain Shams Eng J 6(2):457–470
De Roeck G, Degrande G, Lombaert G, Müller G (2011) Performance evaluation of a steel MRF with large scale magneto-rheological dampers using real-time hybrid simulation. In: Proceedings of the 8th International Conference on Structural Dynamics, EURODYN 2011, Leuven, Belgium, 4–6 July 2011
Karunaratne NPKV (2016) Use of semi-active dampers in seismic mitigation of building structures. Queensland University of Technology, Brisbane
Caterino N, Spizzuoco M, Nuzzo I (2019) Use, effectiveness and long term reliability of mr dampers for seismic protection of framed structures. Conference of the Italian association of theoretical and applied mechanics. Springer, Berlin, pp 1773–1784
Bani-Hani KA, Sheban MA (2006) Semi-active neuro-control for base-isolation system using magnetorheological (MR) dampers. Earthquake Eng Struct Dyn 35(9):1119–1144
Chae Y, Ricles JM, Sause R (2013) Large-scale experimental studies of structural control algorithms for structures with magnetorheological dampers using real-time hybrid simulation. J Struct Eng 139(7):1215–1226
Moon SJ, Bergman LA, Voulgaris PG (2003) Sliding mode control of cable-stayed bridge subjected to seismic excitation. J Eng Mech 129(1):71–78
Bouc R (1967) Forced vibrations of mechanical systems with hysteresis. In: Proceedings of the Fourth Conference on Nonlinear Oscillations, Prague
Wen YK (1976) Method for random vibration of hysteretic systems. J Eng Mech Div 102(2):249–263
Dahl PR (1976) Solid friction damping of mechanical vibrations. AIAA J 14(12):1675–1682
Rodriguez A, Iwata N, Ikhouane F, Rodellar J (2008) Modeling and identification of a large-scale magnetorheological fluid damper. Adv Sci Technol 56:374–379
Dahl PR (1968) A solid friction model. Aerospace Corp El Segundo Ca
Aguirre N, Ikhouane F, Rodellar J, Christenson R (2008) Modeling and identification of large scale magnetorheological dampers. In: 4th European Conference on Structural Control (St Petersburg)
De-kui X, Song-lin N, Hui J, Fang-long Y (2018) Characteristics, optimal design, and performance analyses of MRF damper. Shock Vib. https://doi.org/10.1155/2018/6454932
Peng Y, Zhang Z, Yang J, Wang L (2019) Full-scale simulations of magnetorheological damper for implementation of semi-actively structural control. J Mech 35(4):549–562
Peng Y-B, Li J (2011) Multiscale analysis of stochastic fluctuations of dynamic yield of magnetorheological fluids. Int J Multisc Comput Eng 9(2):175–191
Zolfagharian MM, Kayhani MH, Norouzi M, Jalali A (2019) Parametric investigation of twin tube magnetorheological dampers using a new unsteady theoretical analysis. J Intell Mater Syst Struct 30(6):878–895
Wang W, Hua X, Wang X, Wu J, Sun H, Song G (2019) Mechanical behavior of magnetorheological dampers after long-term operation in a cable vibration control system. Struct Control Health Monit 26(1):280
Soong T, Masri S, Housner G (1991) An overview of active structural control under seismic loads. Earthq Spectra 7(3):483–505
Symans MD, Constantinou MC (1999) Semi-active control systems for seismic protection of structures: a state-of-the-art review. Eng Struct 21(6):469–487
Carlson JD, Chrzan MJ, James FO (1995) Magnetorheological fluid devices, ed: Google Patents
Aly AM (2013) Vibration control of buildings using magnetorheological damper: a new control algorithm. J Eng. https://doi.org/10.1155/2013/596078
Karnopp D, Crosby MJ, Harwood R (1974) Vibration control using semi-active force generators. J Eng Ind 96(2):619–626
Choi S-B, Nam M-H, Lee B-K (2000) Vibration control of a MR seat damper for commercial vehicles. J Intell Mater Syst Struct 11(12):936–944
Lee H-S, Choi S-B (2000) Control and response characteristics of a magneto-rheological fluid damper for passenger vehicles. J Intell Mater Syst Struct 11(1):80–87
McClamroch NH, Gavin H (1995) Closed loop structural control using electrorheological dampers. Proc Am Control Conf 6:4173–4177
Dyke S, Spencer B Jr, Sain M, Carlson J (1996) Modeling and control of magnetorheological dampers for seismic response reduction. Smart Mater Struct 5(5):565
Heo G, Kim C, Lee C (2014) Experimental test of asymmetrical cable-stayed bridges using MR-damper for vibration control. Soil Dyn Earthq Eng 57:78–85
Cha YJ et al (2014) Performance validations of semiactive controllers on large-scale moment-resisting frame equipped with 200-kN MR damper using real-time hybrid simulations. J Struct Eng 140(10):0401
Inaudi JA (1997) Modulated homogeneous friction: a semi-active damping strategy. Earthquake Eng Struct Dyn 26(3):361–376
He W, Agrawal A, Yang J (2003) Novel semiactive friction controller for linear structures against earthquakes. J Struct Eng 129(7):941–950
Dyke S, Spencer B (1997) A comparison of semi-active control strategies for the MR damper. In: Proceedings Intelligent Information Systems. IIS'97, IEEE, pp 580–584
Barroso L, Hunt S, Chase J (2002) Application of magneto-rheological dampers for multi-level seismic hazard mitigation of hysteretic structures. 15th ASCE engineering mechanics conference. Columbia University, New York, pp 2–5
Kumar G, Kumar A, Jakka R (2018) The particle swarm modified quasi bang-bang controller for seismic vibration control. Ocean Eng 166:105–116
Cetin S, Zergeroglu E, Sivrioglu S, Yuksek I (2011) A new semiactive nonlinear adaptive controller for structures using MR damper: design and experimental validation. Nonlinear Dyn 66(4):731–743
Cha YJ, Agrawal AK (2013) Decentralized output feedback polynomial control of seismically excited structures using genetic algorithm. Struct Control Health Monit 20(3):241–258
Zhang J (2012) A novel MR damper based semi-active control system for seismic hazard mitigation of structures. The City College of New York, New York
Zapateiro M, Luo NS, Harimi HR (2009) Neural network-backstepping control for vibration reduction in a magnetorheological suspension system. Solid State Phenom 147:839–844
Ali S, Ramaswamy A (2009) Testing and modeling of MR damper and its application to SDOF systems using integral backstepping technique. J Dyn Syst Meas Control. https://doi.org/10.1115/1.3072154
Yang J, Wu J, Agrawal A (1995) Sliding mode control for nonlinear and hysteretic structures. J Eng Mech 121(12):1330–1339
Lee T-Y, Chen P-C (2011) Experimental and analytical study of sliding mode control for isolated bridges with MR dampers. J Earthq Eng 15(4):564–581
Chae Y, Ricles JM, Sause R (2010) Evaluation of structural control strategies for improving seismic performance of buildings with MR Dampers using real-time large-scale hybrid simulation. In: Structures Congress 2010: 19th Analysis and Computation Specialty Conference, pp 335–346
Zhang H, Wang E, Zhang N, Min F, Subash R, Su C (2015) Semi-active sliding mode control of vehicle suspension with magneto-rheological damper. Chin J Mech Eng 28(1):63–75
Ha Q, Nguyen M, Li J, Kwok N (2013) Smart structures with current-driven MR dampers: Modeling and second-order sliding mode control. IEEE/ASME Trans Mechatron 18(6):1702–1712
Kane MB, Lynch JP, Law K (2011) Market-based control of shear structures utilizing magnetorheological dampers. In: Proceedings of the 2011 American Control Conference, pp 2498–2503
Bitaraf M, Ozbulut OE, Hurlebaus S, Barroso L (2010) Application of semi-active control strategies for seismic protection of buildings with MR dampers. Eng Struct 32(10):3040–3047
Bar-Kana I, Kaufman H (1993) Simple adaptive control of large flexible space structures. IEEE Trans Aerosp Electron Syst 29(4):1137–1149
Song X, Ahmadian M (2004) Study of semiactive adaptive control algorithms with magneto-rheological seat suspension. SAE Technical Paper0148–7191
Wang D, Liao W (2004) Modeling and control of magnetorheological fluid dampers using neural networks. Smart Mater Struct 14(1):111
Jin G, Sain MK, Spencer B (2005) Nonlinear blackbox modeling of MR-dampers for civil structural control. IEEE Trans Control Syst Technol 13(3):345–355
Choi KM, Cho SW, Jung HJ, Lee IW (2004) Semi-active fuzzy control for seismic response reduction using magnetorheological dampers. Earthquake Eng Struct Dynam 33(6):723–736
Guclu R, Yazici H (2008) Vibration control of a structure with ATMD against earthquake using fuzzy logic controllers. J Sound Vib 318(1–2):36–49
Bhardwaj M, Datta T (2006) Semiactive fuzzy control of the seismic response of building frames. J Struct Eng 132(5):791–799
Sun T, Huang Z, Chen D (2005) Signal frequency-based semi-active fuzzy control for two-stage vibration isolation system. J Sound Vib 280(3–5):965–981
Imaduddin F, Mazlan SA, Idris MH, Bahiuddin I (2017) Characterization and modeling of a new magnetorheological damper with meandering type valve using neuro-fuzzy. J King Saud Univ-Sci 29(4):468–477
Priyandoko G, Baharom MZ (2013) PSO-optimised adaptive neuro-fuzzy system for magneto-rheological damper modelling. Int J Appl Electromagnet Mech 41(3):301–312
Mitchell R, Kim Y, El-Korchi T (2012) System identification of smart structures using a wavelet neuro-fuzzy model. Smart Mater Struct 21(11):009
Wang H, Hu H (2009) The neuro-fuzzy identification of MR damper. Int Conf Fuzzy Syst Knowl Discov 6:464–468
Acknowledgements
The authors would like to convey their gratitude to the Abdal Engineering Limited (C-146474/2018), Bangladesh, for providing their facilities and research support.
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions.
Author information
Authors and Affiliations
Contributions
MAA: Formal analysis, writing—original draft, methodology, review-editing, and supervision. SMM: Formal analysis, Writing—original draft. RA: Writing, review & editing.
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The original online version of this article was revised: Due to an unfortunate oversight the co-author’s name has been misspelled. It should be read: Sakib Muhammad Mohtasim.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Abdul Aziz, M., Mohtasim, S.M. & Ahammed, R. State-of-the-art recent developments of large magnetorheological (MR) dampers: a review. Korea-Aust. Rheol. J. 34, 105–136 (2022). https://doi.org/10.1007/s13367-022-00021-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13367-022-00021-2