
Abstract
To better deploy the landside rapid transit network for large airports, this study proposes a multi-objective transit network design model to maximize passenger demand coverage, reduce passenger travel time and minimize operational cost simultaneously. This model is formulated as an equivalent integer programming problem by predefining the transportation corridors and passengers’ OD pairs. A branch-and-cut algorithm is proposed to find a non-inferior solution set. We also conduct trade-off analysis between efficiency, effectiveness and equity under each deployment strategy using the modified Gini coefficient method. The effectiveness of the proposed model and solution algorithm are tested with rapid transit network of the Beijing Capital International Airport. Results show that among the three common network topologies, including star, tree and finger, the passenger demand coverage and travel time reduction per unit cost under star topology outperform the other two topologies. As for finger topology, the performances of the passenger demand coverage and travel time reduction are the best among the three, but the cost is the poorest. In addition, the trade-off analysis shows that the solution whose objective is to maximize passenger demand coverage has a higher efficiency and a lower unit cost than the solution whose objective is to reduce travel time. However, the latter has a higher level of equity, especially for the medium and low-cost solutions. The proposed method in this study can help the decision makers to design effective landside rapid transit networks for large airports to improve the service level.
Similar content being viewed by others

1 Introduction
Airport landside rapid transit networks primarily rely on public transportation systems, such as rail transportion, rapid public transportation and special bus transportation. It provides passenger with rapid transport services between airports and other urban areas. Due to the inherent large traffic throughput and high transport efficiency, airport landside rapid transit networks have become unprecedentedly important in recent years, especially for large airports. For instance, the London Heathrow Airport has constructed three railways and six airport rapid lines to urban areas in London; the Beijing Capital International Airport has constructed one railway and twelve airport bus lines for transportation. During traditional planning process of the transit network, the traffic corridors are usually identified and combined based on travel patterns codified by origin–destination (OD) flow matrices (Laporte and Mesa 2015). Previous studies have suggested that such discrete formulations of links in a network design problem can only be applied to the instance with a very small size of network (Laporte et al. 2011a, b; Zhang et al. 2014). Given that we are going to study a large network in reality, hence such discrete design of OD pairs may be impratical. To overcome such difficulty in solving the real world problem, this study pre-defines three topologies to represent the structure of the studied network. The three topologies, i.e., star, tree and finger, are chosen by taking into consideration the most commonly used configurations of the airport rapid transit network in practice. It should be noted that despite the simple layout, the large number of the stop location choices renders the problem hard, and hence we further introduce a multi-objective optimization model, which considers the expectations from different stakeholders.
The stakeholders who are interested in the planning processes can be broadly classified into three groups: the government, the potential passengers and the operators who offer the service (Laporte et al. 2011a, b). Government sections are mainly concerned about the general benefit that the public can enjoy and one important indicator of this is the passenger coverage. Potential passengers mainly expect to reduce their travel time to access the airport. And operators are mainly interested in cutting the operating cost. However, these objectives are sometimes conflicting in one topologial configuration. For instance, although the checkerboard network has higher operating efficiency, it is usually rejected due to the reason that the cost of it is relatively higher. The star topology can cover more passenger demands, but it has relatively longer operating time. To balance the needs of the aforementioned groups, an optimization model with three objectives (i.e., passenger coverage, travel time reduction and operating cost) is proposed. It should be pointed out that the influence of the opearting frequency and the corresponding vehicle capacities on travel time and operational cost cannot be neglected. Therefore, they have been taken into special consideration in the network design problem. The competition among various transportation modes is usually neglected in previous researches, and thus this study also considers the competition between public transportation and private cars. This optimization problem is soved by the non-inferior solution set estimation (NISE) method.
The main goal of this paper is to propose a landside rapid transit network design method for large airports considering differnt objectives. The computation burden for solving the proposed multi-objective optimization problem is reduced by presetting three transit network topologies as the star, tree and finger. The non-inferior solution set generated by the model are assessed from the perspectives of efficiency, effectiveness and equity. The first two criteria are measured by passenger demand coverage per operating cost and travel time reduction per operating cost, respectively. A modified Gini coefficient method is proposed to conduct the trade-off analysis for selecting the optimal solution.
This paper is organized as follows: Section 2 provides a literature review of landside rapid transit network design. Section 3 discusses the factors considered in this study for landside rapid transit network design. The corresponding multi-objective problem is then formulated. Section 4 uses the Beijing Capital International Airport as a case study. Section 5 analyzes the solution performance. Section 6 concludes this study.
2 Literature Review
2.1 Transit Network Topological Configurations
In the early 1990s, numerous researchers investigated airport transportation network system planning. In the popular book “Planning and Design of Airports” written by Robert et al. (2010), airport transportation network system planning and design methods were proposed. However, the research only focused on the transportation facilities such as terminal area driveways. Studies on airport landside transit network planning are scarce. Trational method of designing a network is to assign the passenger flow to each OD pair and discretely formulate the links between nodes. However, such discrete formulations cannot handle the modal competition for such enormous realistic size instances because of the complexity of modeling alternatives for each flow in the network (Gutiérrez-Jarpa et al. 2017). Zhang et al. (2014) discussed that even for a small network of given stops (20 nodes) and links, the required constraints and variables can be extremely hard to solve. To overcome such difficulty to solve the real world problem, researches have introduced other methodologies by pre-assigned the topological configuration. Bruno and Laporte (2002) indicated that the predefined network topology can significantly improve the computation speed of transit network design model. They also proposed several types of common transit network topologies. Based on the transportation modes between airport and urban area, Qin (2007) classified transit network topological configurations into the following types: interchange hub connection, interchange node connection and demand node connection. Zhang et al. (2010) and He and Guo (2014) proposed four common topological configurations (i.e., the finger, cartwheel, tree and cross). They established a network optimization model to minimize passengers’ travel time. Gutiérrez-Jarpa et al. (2017) compared the performance of passenger demand coverage and construction cost among three transit network topological configurations (i.e., the star, triangle and cartwheel) and proposed a method to determine the optimal network topology. The existing research has essentially reached a consensus on the advantages of presetting transit network topological configurations, however, studies on the evaluation of airport landside rapid transit network topology are scarce. In addition, airport transit network can have different configurations at different stages. For instance, the Beijing International Capital Airport metro network started with a single route before, and gradually becoming cross shaped. Currently, it is close to a star topology, and new lines will be constructed in the future. Determination of the optimal topology is a complex process that requires a comprehensive evaluation from multiple views. A pre-designed topological configuration is a positive feature for planners as it incorporates their knowledge of the demand flows in cities (Bruno and Laporte 2002). We did some researches before fomulating the transit network design problem. We found that in most large cities in China, the configurations of airport lanside rapid transit network are quite simple and can be classified into the following topologies (i.e., star, finger and tree). The method proposed in this study is universal to some extent, and valid comparing various types of airport rapid transit network topologies.
2.2 Planning Objectives
The objectives of the airport transit network optimization problems can be categorized into two types. The first includes the objectives constructed based on graph theory such as transit network connectivity, reachability, and straight-line coefficients (Nicholson and Du 1997; Pan and Deng 2010). However, this type of objectives focuses on evaluating static characteristics of established transit networks, while dynamic network characteristics are ignored. The second defines passengers’ travel characteristics such as travel time, travel distance and travel cost. Mahmassani (2002) and Zhang (2011) have considered the shortest passenger travel time as an objective to formulate the model and obtained an optimal solution using a heuristic algorithm. Bergener et al. (2011) analyzed the Chicago airport landside transit network using ArcGIS and proposed a line network optimization strategy to minimize the passenger travel distance. Vuchic and Newell (1968) showed that the passenger travel time and operational cost were inversely correlated to some extent. They compared the two objectives above and found that reducing operating cost could lead to a fewer number of bus stations. Han et al. (2018) analyzed the mechanism of passengers’ decision-making procedure and influence factors of the travel mode choice. Latent variables including safety, comfort, convenience, flexibility and economy were selected to reflect the satisfaction degree of passengers on a specific type of the transportation mode. Based on the SEM-Logit Integration Model, it was found that flexibility, which is measured by delay time in travel, operation speed of the vehicle and the waiting time, is the most significant variable affecting passengers’ mode choice among all the influential factors. Therefore, an optimization solution aimed at minimizing travel time was recommended. In recent years, many researchers have raised concerns regarding the equity of public service. Transit equity has been gradually considered as optimization objectives. Perugia et al. (2011) used the common maximum-minimum objective function in economics as an equity index to minimize the population coverage under the most unfavorable conditions. However, the results error was big when testing the model in case study. Gutiérrez-Jarpa et al. (2013) characterized transit network equity using the indicator of travel population coverage. However, none of the research measures the equity from the perspective travel time reduction. In this study, we extend the conception of the Gini coefficient to measure the fairness of travel time reduction in different network design solutions.
2.3 Transit Network Design
Researches on optimization approaches for rail and bus transit network began in the 1970s. In early studies, researchers generally determined network layout based on urban location importance. Dicesare (1970) used a single-line layout, and the pipeline positioning method to determine site location. Current et al. (1985) advanced the literature by proposing a model for rail transit network layout based on unit importance, which was a substantial breakthrough compared to the previous qualitative analysis method. Subsequently, Ceder and Wilson (1986) proposed an efficient algorithm for solving the multi-path bus network optimization problem and obtained better results for dual-path bus network problem. Matisziw et al. (2006) discussed a mathematical method to improve the service level of the existing network. However, solving the massive bus network optimization problem is still challenging as is articulated by Baaj and Mahmassanizai (1991) and Gao et al. (2002). In recent years, researches have mainly focused on transportation systems, network planning and flow distribution. Southworth and Peterson (2000) established various models for harbor freight network design based on several elements such as joint transportation and transportation tools. However, their research only focused on the optimization of network transportation cost, without considering transportation efficiency. Iannone (2012) employed an “interport model” network programming tool and investigated the cost efficiency performance of airport transportation network using a mathematical model. Researchers such as Bell et al. (2013) and Castillo-Manzano et al. (2013) established a traffic distribution model for shipping containers to minimize logistics transportation costs. The differences between this study and previous ones are in the following ways: (1) We consider the competition among various transportation modes such as airport public transit and private cars. The degree of competition between the two transportation modes determines the passenger flow in each system, which subsequently affects transportation efficiency. This is considered in the objective function of the model in this study. (2) Transit network design is based on a predefined topology. It provides a group of relatively accurate routes and candidate nodes. Further, it also improves the computation speed of the solution algorithm.
2.4 Heuristic Algorithm
Network optimization problems are normally solved by heuristic algorithms. Bruno and Laporte (2002) designed an algorithm to find a single route to maximize population coverage under constraints on node quantity and spacing. Then they applied this method to multi-route scenarios. One characteristic of their study is that the network topology is determined in advance. This paper combines the advantages of the two methods, human intervention and mathematical planning. Emerging in the early 1980s, intelligent algorithms are heuristic methods used to solve combined optimization problems, mainly including genetic algorithms, simulated annealing, ant colony algorithms and artificial neural networks. Guo (2017) proposed a public transportation network optimization model based on minimizing travelers’ cost. They also found that this model can be solved using a mixed heuristic algorithm. In this paper, to obtain an accurate solution, the transit network design problem is formulated to a mixed integer problem. Branch-and-cut algorithm is used to obtain a group of non-inferior solutions, and the characteristics of different solutions are compared.
3 Problem Description
3.1 Study Workflow
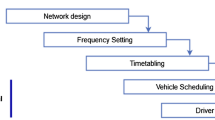
The content of this paper includes four parts: data acquisition, model formulation, algorithm design and case study. The specific research process and research methods adopted are shown in Fig. 1.

Research process chart
3.2 Model Development
3.2.1 Network Structure
Consider an undirected network G (N, E), where N = {1, 2, …, n} is the node set, and E = {(i, j): i, j ∈ N, i < j} is the edge set. A node represents a passenger distribution point as well as a candidate station. An edge is formed between node pairs that satisfy the maximum or minimum distance between adjacent stations. The network topology is predefined, and a set of continuous edges is generated by the proposed model to form the route network. Figure 2 shows three types of airport rapid transit network topologies, including the star, tree and finger.

Three types of airport landside rapid transit network topologies
Taking the star topology as an example, Fig. 3 shows the elements in the network. The network consists of three corridors (dark gray) and six terminal areas (light gray). In this study, the corridors represent the densely populated areas containing airport passenger collection points (e.g., train stations, bus stations, subway stations, commercial entertainment and residential areas). The terminal areas represent areas composed of a number of travel origin or destination. In each corridor, a chain of edges configures a line. The nodes of each line are in the corridor, and the origin or destination is in the terminal area. The corridors and terminal areas are all preset.

Corridors and terminal areas of a star topology
C denotes the corridor set. Nc denotes the node set in the c-th corridor, and Nk denotes the node set in the k-th terminal area. \({N}_{T}\) denotes the node set in all the terminals. A terminal is the origin or destination of a route. Based on this definition, the airport must be in a terminal area. Denote a and b as the origin and destination of a passenger trip, respectively, one of them being in the airport. For departing passengers, b is the airport. For arriving passengers, a is the airport. For a predefined topology, there are multiple routes between a and b. Eab denotes the edge set which is formed by two nodes \(i\) and \(j\) of all routes between a and b. It should be noted that we have pre-assigned three topological configurations for the rapid transit network, and hence not every edge can be on the route of a to b. Cab denotes the set of corridors traversed by routes between a and b. Nab denotes the set of points traversed by routes between a and b.
3.2.2 The Influence of Frequency
As for the public transportation planning and design problem, the influence of airport bus frequency on the travel time and operational cost cannot be neglected. According to Ceder (2016), the average waiting time of the passengers is half of the reciprocal of bus frequency. Obviously, higher frequency of airport bus can significantly reduce the waiting time and thus improving the possibility of choosing public transportation instead of private cars. However, purely improving passenger satisfaction will come at a cost to the public transportation provider, as excessive services can significantly increase the operational cost. The influence of vehicle frequency on the network design process is considered by using the cost per unit kilometer to calculate the operational cost, which can both reduce the difficulties of solving the problem and conform to the actual situation. In recent decades, with the emerging technologies of advanced management system, instead of providing traditional fixed-schedule bus service, operators now tend to employ more flexible airport bus operational strategies. The pioneering practices in the context is to reorganize bus frequency to cater for the actual travel demand and meanwhile minimize the budget to an acceptable level.
Passengers choose a certain airport bus route primarily based on the locations of their origins. It can be assumed that passengers always choose the nearest airport bus stations from their origin to minimize the transfer time. The practical operation of the airport bus network should be adapted to the passenger demand, which is distributed in temporally and spatially heterogenous manner (Liang et al. 2021). A rational assignment of airport bus frequency is important for coordinating airport bus demand and supply, and the degree of coordination between the two is a major reflection of the level of airport bus service. A commonly employed determination of bus frequency is presented as follows:
where \({Fre}_{ab}\) refers to the operating frequency from a to b by airport bus; \({v}_{max}\) denotes the maximum cross-sectional passenger flow on the airport bus routes from a to b; \(\alpha\) is the actual passenger load factor (\(0\le \alpha \le 1\)). \({C}_{v}\) denotes the airport bus capacity, including seating capacity and standing capacity. It is usually expressed by the maximum number of passengers that the airport bus can accommodate;
It can be seen from the Eq. (1) that the frequency of airport bus is influenced by a number of factors. \({v}_{max}\) is an indicator reflecting the passenger demand for a specific route and the frequency is proportional to it. In reality, the passenger flow usually varies from time to time at different stations of a certain route. In order to reduce the difficulty of calculation, we use the average passenger demand to determine the frequency. \(\alpha {C}_{v}\) indicates the actual capacity of the vehicle, which is inversely proportional to the frequency. \({C}_{v}\) is primarily determined by the overall size of the bus, as well as the interior design of the bus. As for airport shuttle bus, the capacity is usually fixed according to the licensing details in China. \(\alpha\) can reflect the crowdedness of the airport bus. The smaller the \(\alpha\) is, the more comfortable the passengers are. As \(\alpha\) increases, the airport bus becomes more crowded, but the operating cost becomes lower.
3.2.3 Parameters and Variables
Node i and j both denote the candidate station of a line. Edge (i, j) denotes a candidate section of a line. The OD pair (a, b) represents passenger flow through geographical space, from origin a to the destination b. To simplify the problem, all the passengers that are involved in the survey to obtain relevant data are considered as departing passengers. Therefore, the destination b in the OD pair (a, b) represents the airport. We assume that an airport bus route that originates from a candidate station is denoted by the number 1, and terminates at the candidate airport station is denoted by number N. The airport bus travels through the urban area which contains N candidate stops. It should be noted that there are usually two bus stops at a specific location, one bus stop on each side of a road segment. In order to simplify the problem, we only consider one-side bus stops when constructing the model to design the transit network. We also assign different numbers to represent different origins and the destination. Each origin of the trip which is represents by node a is also labeled by continuous integer starting from 1. Being the destination, the airport is denoted by a very large number M to distinguish from node a. Therefore, in an OD pair (a, b), the value of a is smaller than b.
The parameters and decision variables used in the mathmatical formulation are presented in Table 1.
3.2.4 Mathematical Programming
The multi-objective functions for airport transit network optimization problems is formulated as:
Equations (2)-(4) seek to maximize passenger demand coverage, maximize travel time reduction and minimizes operational cost, respectively. It should be noted that there are a number of factors that may affect the airport access mode choice of the passengers (Gokasar and Gunay 2017). Some of the factors (e.g., travel time, cost, comfort, reliability) are specific to a given mode of transportation (Tam et al. 2008; Alhussein 2011; Jou et al. 2011; Akar 2013; Bao et al. 2019; Pasha et al. 2020); others (e.g., age, gender, income) are specific to the socioeconomic characteristics of travelers (Tam et al. 2008; Gupta et al. 2008; Alhussein 2011; Choo et al. 2013). Given that the focus of this paper is the planning of the transit network, not the behavior of travelers, we only consider the trip characteristics of different transport modes when formulating the model. Previous studies (Bao et al. 2019) have also revealed that the main concerns of passengers for selecting the ground access mode to the airport vary by regions (Gokasar and Gunay 2017). Therefore, before developing the multi-objective functions, we did some researches regarding the main factor that affects the passenger preference of travel mode to Beijing Capital International Airport. The data were collected from 8,435 passengers through an online survey which is about the stated preferences and the corresponding influential factors pivoting on their most recent trip to the Beijing Capital International airport. Results show that a significant higher proportion (83%) of air passengers perceived the travel time reduction as their primary consideration when choosing the travel mode to the Beijing Capital International Airport, as the city Beijing suffers from severe traffic congestion in most of the times just like many densely populated metropolitans around the world. Therefore, we only include travel time reduction in the objective function to reduce the difficulty of solving the model to a certain extent and conforms to the actual travel characteristics of airport passengers.
The constraints are formulated as:
Constraints (5) ensures that each corridor with an extremity in terminal k has an edge connecting a node in the terminal with a node in the corridor. Constraints (6) ensures that exactly one node in terminal k is a station. Constraints (7) and (8) ensure continuity between edges in the network. A terminal is connected to only one edge and a corridor node is connected to two edges. Constraints (9) ensures that all travel origins are distributed to one nearby station at most. Constraints (10) ensures that the trip origin a can be served by station i only if such a station exists. Constraints (11) ensures that all travel destinations are distributed to one nearby station at most. Constraints (12) ensures that trip destination b can be served by station j only if such a station exists. Constraints (13) and (14) ensure that when the passengers’ origin and destination are distributed to a nearby station, the OD point pair (a, b) will be covered by the transit network. Constraints (15) ensures that the edge of route between a and b is selected as edge in the transit network only if the transport demand of the OD point pair (a, b) is covered by the transit network. Constraints (16) ensures that the airport bus transit capacity for the route between a and b can cover the passenger demand of the route. Constraints (17) and (18) ensure that when the passengers’ travel time by car is shorter, the value of wab is 0, which indicates that the OD point pair (a, b) is not covered by the transit network. It should be noted that we only consider the competition between airport bus and private car in constraints (24). The reason is that the vast majority of passengers still choose road transport to get to the airport (80%) according to the annual report of Beijing Capital International Airport (2018), while only a small percentage of passengers choose rail transport (e.g., subway). Therefore, we only focus on the competition between airport buses and cars.
4 Case Study
4.1 Research Area and Data Resources
This study uses the Beijing Capital International Airport to demonstrate the effectiveness of the proposed method. The airport is 25 km from Beijing urban center. In 2019, the passenger throughput was 95 million, and the take-off and landing volume was 606,000, which ranked first in China and second in the world. The average airport landside daily passenger volume is 258,000, and the passenger primarily come from the locations within 1.5-h travel time around the airport. Survey data shows that 85% of passengers come from 95 transportation zones in urban areas. The center of each transportation zone is defined as the passenger demand distribution point, as shown in Fig. 4.

Passenger distribution points of the Beijing Capital International Airport
The data used in this paper are collected through questionnaire survey conducted in T3 terminal of the airport. The sampling rate was 10%, and the survey took place from 8:00–10:00am on October 15, 2019. According to the airport statistics, the daily peak travel period is from 8:00 to 10:00 am (Fig. 5), during which time the passenger flow accounts for approximately 12% of the entire daily total. Therefore, the survey was conducted during this period of time. The full sampling method is used to estimate all the arriving and departing passengers during the period of time. Survey questions included both passenger attributes (e.g., passengers’ gender, age, profession, travel origin and destination) and travel characteristics (e.g., travel mode, travel time and travel cost). A total of 13,825 questionnaires were obtained, of which 12,262 were valid. The statistics of passengers’ characteristics are shown in Table 2. The survey shows that the passenger attributes of the sample are consistent with the data published in the airport’s annual report, indicating that the sample has high reliability and can be used in this study (Annul report of Beijing Capital International Airport Co., Ltd 2018).

The distribution of passenger flow of one day
This paper compares the structures of three types of rapid transit networks including the star, tree, and finger topologies. He and Guo (2014) analyzed the landside transit networks of several large airports in Beijing, Shanghai, Guangzhou, and Shenzhen, They concluded that the landside transit network structures of domestic airports usually fell into one of four types: the finger, spoke, tree and cross. In conjunction with the "Beijing Capital International Airport Public Transportation System Development Plan (2015–2030)" formulated by the Capital Airport Group, we pre-drew the transportation corridors and terminal areas of the airport under three types of topology –the star, tree and finger – as shown in Fig. 6.

Transit network topologies of the Beijing Capital International Airport
4.2 Model Parameters and Solution
4.2.1 Model Parameters
There are three important parameters in the model: passenger demand, travel time and operational cost. The passenger demand of each of the airport bus route that operates along the corridors selected for the transit network is estimated based on both the aforementioned survey data and the historical flow of people in the catchment area of the airport bus station. The maximum radius of the catchment area of a bus station is determined by the acceptable walking distance of passengers. According to the “Urban Road Traffic Planning and Design Specifications (GB50220-95)”, the service radius of a bus stop in China is designed as 500 m. It should be noted that travelers may also take other public transit lines in Beijing and transfer to the airport bus line to reach the airport, and thus, the average number of alighting customers from the subway station or the regular bus station covered by the catchment area of the selected airport bus stops is also taken into consideration when estimating the potential passenger demand. When passenger demand distribution point is within 500 m from an airport bus station, the transportation mode to/from the airport bus station is considered as walking. When the distance is over 500 m, the transportation mode to/from the airport bus station is considered as the combination of public transportation (i.e., regular bus and subways) and walking. The travel time by airport bus or car is calculated using vehicle travel speed. Based on Beijing’s urban area transportation conditions, there are two zones: the central zone and the peripheral zone. The travel speed in different zones by different modes is listed in Table 3. Operational cost mainly consists of the line operational cost and the station maintenance cost. The parameters, based on the annual report of the Beijing Public Transportation Development Statistics, are listed in Table 4. According to the aforementioned analysis, the frequency of airport bus service has great impact on passenger waiting time and operation cost. The frequency of current airport bus which provides access service to Beijing Capital International Airport varies according to the routes it runs. In general, the frequency of airport buses which run through the central zone of the city are relatively higher than those mainly operate in peripheral zones. Given the fact that passenger demand is usually larger in central zones of the city, we can therefore assume that an acceptable way to preset the frequency is to make it proportional to the passenger demand of each route, which can be obtained from the aforementioned survey data. We also need to know the airport bus capacity and the load factor in practice to preset the frequency. As for the former parameter, according to the official website of Beijing Capital International Airport, there is no significant difference in the capacity of airport buses operating on different routes. The maximum number of passengers that an airport bus can carry is around 45 in Beijing. The crowdedness of an airport bus is determined by the actual load factor. Load factor is an indicator which can measure the comfort level of travelers. Shen et al. (2016) classify the comfort perception level based on different load factors of regular buses. We modified crowdedness level in order to accommodate to the realistic operation of airport bus in Beijing. We also take the impact of COVID-19 into consideration as it would be better to keep social distance between any two passengers under the context of the ongoing pandemic. Detailed classifications are shown in Table 5. Based on the survey conducted in Beijing Capital International Airport, the average load factor is 0.6.
4.2.2 Multi-Objective Solution
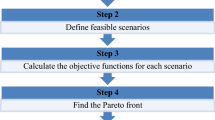
There are three objectives in this optimization problem: maximum passenger demand coverage, maximum travel time reduction and minimum operational cost. Classic methods for multi-objective problems can be generally devided into two catogories: combined method and limited method (Shadkam and Jahani 2015). As for the former one, multiple objectives are aggregated into a single objective function. However, applying such simplification to the rapid transit network design issue in this study involves arbitrary rules that can hardly capture the accurate complexity of real world decision issues, and hence we attempt to use the second type of approach to solve the optimization problem in this study. In 1978, Savas (1978) suggested that efficiency, effectiveness, and equity were the three main criteria that should be used to evaluate the performance of public facilities. Given that airport rapid transit systems are public infrastauctures facilities which are meant for serving the general public, we suppose that coverage of passenger demand and travel time reduction deserve more attention than operational cost when designing the airport transit network. Therefore, we converted this triple-objective optimization problem into two bi-objective optimization problem. The three objectives are divided into two objective pairs: (1) passenger demand coverage and operational cost; (2) travel time reduction and operational cost. It should be noted that it is almost impossible to find an optimized solution that covers all the restrictions together in a problem with multiple objectives. However, the use of Pareto frontier can help obtain the reliable answers(Shadkam and Jahani 2015). Bérubé et al. (2009) found the ε-constraint method can efficiently generate the Pareto frontiers, especially for bi-objective problems. The idea of the ε-constraint method is to keep only one of the objectives and restrict the rest of the objectives within some user-specified values (Mavrotas and Florios 2013). In each bi-objective problem, the objective function of operational cost is converted into a budget constraint by the ε-constraint method. The other objective function (either the passenger coverage or the travel time reduction) remains. And thus, the left-side of the new constraint is the calculation formula of operational cost, and the right-side of the constraints (i.e., the value of ε) can be viewed as budget. This budget constraint can be easily interpreted and grasped for the decision makers. It should be noted that for each bi-objective problem, the formula for calculating the third objective is a combination of parameters and decision variables. And thus the value of of it still depends on different solutions of the optimization problem. The advantage of ε-constraint method compared to other methods is that different pareto-optimal solution can be found using different ε values. Through this process, two sets of non-inferior solution can be obtained.
4.2.3 Solution Algorithm
Intelligent algorithms such as genetic algorithm and ant algorithm are often used to solve the network optimization models. Although these algorithms have advantages, they only provide suboptimal solutions even for small-scale networks. The problem investigated in this study is a mixed integer problem. Branch-and-cut method is one of the most effective precision algorithms used to solve such problems. (Gutiérrez-Jarpa et al. 2010) The algorithm framework is primarily based on the boundary-branching and plane-cutting algorithms. Upper and lower boundaries, as well as effective and enhanced boundaries in equations, are added to improve solution efficiency.
Based on the branch-and-cut method, we build a tree based on a maximization strategy. Each node corresponds to a sub problem. A tree root node is a continuous relaxation problem derived from the original mixed integer problem. If the solution to the relaxation problem contains one or more partial variables, they will be removed. The sections removed from the feasible region contain the partial integer solution to the relaxation problem. If the solution to the remaining relaxation problem still contains one or more partial integer variables, we divide the partial variables into two new sub-problems. Each branched variable has a strict boundary (e.g., a binary variable). The sub-problem may yield an all-integer solution, an infeasible solution or a partial integer solution. If the problem solution contains a partial integer solution, we will repeat the above procedure until the optimal solution is obtained (Sun 2014). The general procedure of the branch-and-cut algorithm is as follows:
-
Step 1 (initial phase): The model is formulated as a linear programming relaxation initial model, P0, with Constraints (11) ~ (22). The initial upper bound is set to be Zu, the initial lower bound is set to be Zl, and s = 0.
-
Step 2 (solution to linear programming model): Model Ps is solved via the simplex method. Assume that xk is the optimal solution to Ps. If xk is an integer solution, then xk ∈ S (Where S is the feasible region for the solution to the original problem), and xk is the optimal solution, then exit. Otherwise, go to step 3.
-
Step 3 (recognition algorithm): The current xk value is determined to modify the lower bound Zl. Based on the type of the equation in the original problem, an “odd cut” in the equation that violates xk is identified to solve the xk recognition problem. If one or more of the inequality are violated by xk, the equation is added to Ps to create Ps+1; set s = s + 1, and go to step 2. If no inequality is violated and xk is not an integer solution, go to step 4.
-
Step 4 (branch boundary): If the current solution xk is a non-integer solution and no inequality constraints is violated by xk is not identified, then a non-integer component of xk is selected as a branch to form a branch tree. Next, a node in the current branch tree is calculated in order, based on the rule, and the current upper bound Zu is modified. Define Ps+1; let s = s + 1, and go to step 2. Otherwise, create a cutting plane based on the current non-integer solution and add it into Ps to define Ps+1; let s = s + 1 and go to step 2.
5 Results
5.1 Computational Results
According to the method given in Sect. 4.2, the multi-objective problem is converted into two sets of multi-objective problems in which the operating cost is reformulated as the constraint. The NISE (Non-inferior solution set estimation) method (Cohon 2003) is used to solve different objectives separately, resulting in two sets of solutions. The two sets of solutions are non-inferior solutions under corresponding objectives. To simplify the analysis process, the Pareto optimal solution acquisition process is adopted, and the curve front of the non-inferior solution set is selected as the set of candidate solutions. The basic parameters of the solution process and the number of solutions are shown in Table 6. The two sets of solutions are shown in Table 5. Based on these results, we plot the non-inferior solution distribution maps under different objectives shown in Figs. 7 and 9. Each solution corresponds to a network structure. For example, the star network structure in Fig. 8 corresponds to target Z1 in Table 7 and solution 2 in the star structure. Due to space constraint, we only show the network structure diagrams of six solutions in Figs. 8 and 10.

Non-inferior solution distribution curves for objective Z1 under the three topologies

Network structure of one solution for objective Z1
We solved the model using CPLEX12.6.1, on a PC Intel Corei7 at 3.8 GHz, with 16 GB RAM, and Windows7. Table 4 shows the number of constraints, the number of solutions in each configuration, and the average computing time of each solution under the goal Z1 and goal Z2, respectively. We used equally spaced ε value to find different non-inferior solutions. The convergence results are shown in Figs. 7 and 9. It shows that the solution time under the objective of travel time reduction (Z2) is longer than that of passenger demand coverage (Z1). The main reason is that Constraints (21) and (22) have a significant impact on Z2, which increases the convergence time of the boundary branching process. For the three topologies, the running time for tree topology is the largest. This is because it has more variables and constraints than the other two topologies.

Non-inferior solution distribution curves for objective Z2 under the three topologies
Columns 2–7 in Table 7 list the computational results for objective Z1. Figure 7 shows Non-inferior solution distribution curves for objective Z1 under the three topologies. Figure 8 shows the network topology of one specific solution in the non-inferior solution set. The main findings are as follows: (1) Among the three topologies, the performance of average passenger demand coverage per unit operational cost under star topology (0.082 passengers/RMB¥) is the best. By comparison, the averages passenger demand coverage per unit operational cost for tree topology and finger topology are only 0.073 passengers/RMB¥) and 0.060 passengers/RMB¥), respectively. Thus, if all else being equal, the star topology can meet the travel needs of a larger number of passengers. (2) When the operational cost reaches 2.5 million RMB¥, the star and tree topologies achieve similar passenger demand coverage. It means that as the operational costs increases, both the star and tree topologies can satisfy the passenger demand. (3) The finger topology has higher passenger demand coverage than the other two topologies. However, the average operational cost per passenger of finger topology is 39.1% and 23.8% higher than those of star and tree topologies, respectively.
Columns 8–13 in Table 7 list the computational results for objective Z2. Figure 9 shows the distribution of non-inferior solutions. Figure 10 shows the network topology of a solution in the non-inferior solution set. The main findings are as follows: (1) Among the three topologies, the performance of travel time reduction per unit operational cost under star topology (0.020 h/RMB¥) is the best. By comparison, the average travel time reduction per unit operational cost for tree and finger topologies are 0.016 h/RMB¥ and 0.015 h/RMB¥, respectively. Thus, if all else being equal, the star topology can meet more travel time reduction for passengers. (2) The average travel time reduction for tree topology is the lowest. There is a low line directness and a high line detour for tree topology, therefore, passengers need to spend more time when traveling to airport. (3) The finger topology has higher travel time reduction than the other two topologies. However, the operational cost per passenger of finger topology is 26.6% higher than that of star topology.

Network structure of one solution for objective Z2
5.2 Trade-Off Analysis of the Solutions
Using the method mentioned above, we have obtained two groups of non-inferior solutions under the target Z1 and Z2, but how to choose between them? There are two traditional methods: (1) Choosing the solution with higher importance or priority, which mainly depends on the planning strategy formulated by the decision maker. If the decision maker pays more attention to whether the plan can meet the travel needs of passengers, he can choose the plan under goal Z1; if he pays more attention to the travel efficiency of passengers, he can choose the plan under goal Z2; (2) Choosing the solution whose value is closer to the expected value. Generally, decision makers will determine a number of goals before formulating a plan, such as the length, scale, and coverage of the planned network. Then, the values of indicators of each plan and the expected values will be compared with each other, and the plan which is closer to the expectation will be selected. However, these two methods have several shortcomings: (1) The importance of the goal and the expected value both depend on the subjective judgment from decision maker and lack a quantitative analysis process; (2) The fairness of the plans can only be compared by the target value, not the perspective of passengers. To select the solution with higher fairness for passengers, this paper introduces the Gini coefficient to evaluate the equity of different transit network designs. Gini coefficient is a well-known measure of statistical dispersion describing the inequality of income or wealth distribution among a nation’s residents (Hu 2004). In recent years, the Gini coefficient method has been widely applied in many other domains of science to analyze any data with an unequal distribution. In this section, we further extend the conception of Gini coefficient so as to measure how evenly the travel time reductions are distributed to the target passengers traveled from different origins in the urban areas to the airport. As we analyzed before, one of the most important factors that affects passengers’ choices of airport access mode is travel time. Therefore, one of the main purposes of proposing this multi-objective optimization problem is to reduce the travel time for all the passengers (or at least for most of the passengers). What is not expected to see is that a significant reduction of travel time is only experienced by a small proportion of passengers, as the existence of large travel time reduction disparity can suggest the inequity of the proposed transit network design. Therefore, the Gini coefficient is applied to evaluate the equity of travel time reduction thus the fairest design solutions can be selected.
The Gini coefficient is calculated based on the Lorentz curve. In a conventional Lorentz curve, the horizontal coordinate represents the accumulated percentage of the population, and the vertical coordinate represents the accumulated percentage of income. Followed by this method, we decompose the passengers into different groups according to the absolute value of their travel time reduction in an increasing order. Figure 11 shows the Lorentz curve of one solution. The x-axis represents the cumulative share of passengers, and the y-axis represents the cumulative share of total time reduction of the corresponding passengers. Thereby, the Gini coefficient is the ratio of the area between the 45-degree diagonal line and the Lorentz curve (A) to the total area under the 45-degree diagonal line (A + B). The smaller the Gini coefficient of a solution, the fairer the solution it is. In this study, the Gini coefficient is calculated according to the total number of passengers in the airport. Taking solution 2 in Table 5 as an example, we assume that the characteristics of passenger at each distribution point are equal. Note that Tab_car and Tab_bus of passengers starting from different distribution points can be calculated according to the network structure (star topology) in Fig. 8. Thereby, value of Fab for each distribution point can be obtained. Then, according to the OD data of each distribution point, we calculate the cumulative time saving (Table 6) and the cumulative proportion of each distribution point time saving (y-axis) to plot the Lorentz curve of each distribution point. The calculation method for the other schemes can follow the same way.

Lorentz curve and Gini coefficient
The efficiency is determined by solution effectiveness. In this study, the passenger demand coverage and travel time reduction are the main indicators for evaluation. Among the three topologies, the performances of passenger demand coverage and travel time reduction per unit operational cost for star topology are the best. We also changed the operation frequency of airport buses for each route in the whole transit network to study how the results differ from the current one. Generally, higher operation frequency greatly reduces the travel times of the passengers as the service regularity is directly related to the waiting times. However, the more frequent the airport bus operates, the more operation expenses would be generated. Nevertheless, the star topology still remains the best topology from the perspective of the performances of passenger demand coverage per unit cost and travel time reduction per unit cost.
Therefore, the following paragraph focuses on the efficiency and equity of each feasible solution under the star topology. Tables 8 and 9 show all non-inferior solutions for the star topology under the two objectives. Figure 12 shows the operational cost versus Gini coefficient for each solution (i.e., cost versus equity). In general, a higher operational cost results in a lower Gini coefficient. Although increasing cost improves equity to some extent, their interrelationship is non-linear. When the operational cost is higher, the equity improvement rate reduces. Figures 7 and 9 also show the marginal improvement rates of the passenger demand coverage and travel time reduction reduce gradually. Figures 13 and 14 show the efficiency versus equity. Based on Fig. 13, although the efficiency of solutions under objective Z1 is normally higher (lower per passenger coverage cost), when the cost is at a medium or low level, the Gini coefficient of the solutions for objective Z2 is significantly lower than that of the solutions for objective Z1. Thus, at a same efficiency level, the solutions for objective Z2 have a higher level of equity, and the solutions for objective Z2 are always superior to the solutions for objective Z1. In Fig. 14, at the medium-cost level, the efficiency of the solutions for objective Z1 is slightly higher (a slightly lower cost per unit of time reduction). However, the solutions for the two objectives have similar levels of equity. Although a minority of the solutions for objective Z1 has higher efficiency, the equity is inferior to that of the solutions for objective Z2.

Operational cost versus Gini coefficient under different objectives

Per passenger coverage cost versus Gini coefficient under different objectives

Unit time reduction cost versus Gini coefficient under different objectives
In general, the solutions for objective Z1 have higher efficiency. They normally have a lower unit cost for passenger coverage and travel time reduction than the solutions for objective Z2. Therefore, it is better to choose maximizing passenger demand coverage as the objective when designing airport transit network, which can achieve a lower operational cost and a higher service quality. On the other hand, the solutions for objective Z2 have higher equity. This difference is particularly obvious in the solutions under medium and low operational cost situation. This implies that, in medium and small-scale transit networks, although the solutions for objective Z1 meet a larger passenger demand, the performance of travel time for the majority of passengers is devastated, which leads to a relatively high Gini coefficient. Therefore, from the perspective of passenger service equity, the solutions for objective Z2 are optimal.
Compared with the previous planning and decision-making process, the method in this study not only considers the trade-off between the operational efficiency and cost but also focuses on the equity of the solutions. We hope that this decision-making method can also be applied for the planning of other types of transportation networks, such as rail transit network.
6 Conclusions
This paper proposes a multi-objective integer programming model for the airport landside rapid transit network design. Compared with traditional research, this study has the following advantages. First, the topology of the airport landside transit network is pre-determined by taking into account the actual passenger demand characteristics of the airport. It helps to reduce the computational time for solving the network optimization model, through which a more accurate planning solution can be obtained as is validated in the numerical application. Second, the model takes into account the competition between public transportation and cars. By introducing the indicator of passenger travel time reduction, the impact of travel time on transit network design is quantified. It is the most important difference between this model and traditional model. Finally, this paper converts the triple-objective optimization problem into two separate dual-objective problem to generate two effective alternative solutions, by which the computational burden is greatly reduced. Further, a trade-off analytical method is proposed to measure the efficiency and equity of each solution to help the decision makers to choose a better solution.
In fact, airport landside transit network design should include three aspects: network planning, vehicle configuration and operation frequency determination. The combined processing requires more relevant models to be built. This paper focuses on network design, which is a strategic decision process. Based on the results in this paper, the planner can develop detailed airport bus operation schedules under different solutions. An interesting feature of this study is the ability to quickly generate transit network design solutions that will provide the basis for subsequent transportation organization and operational evaluation of transportation.
As the model calculation result is based on the NISE method, it only can identify a subset of non-inferior solutions. It will be possible to apply other new method to obtain all non-inferior solutions for larger transit network. Besides, there exists a number of ways to solve this triple-objective problem and show the tradeoff. These methods are worthy of exploring in future studied. In addition, the factors that affect whether airport passengers choose public transportation include travel costs, comfort level, etc. These factors can be added to the constraints of the model in future studies to obtain more accurate indicators that can better cover the needs of passenger, thus the transit network can be further optimized.
Data Availability Statement
The datasets generated during and analysed during the current study are available from the corresponding author on reasonable request.
References
Akar G (2013) Ground access to airports, case study: Port Columbus International Airport. J Air Transp Manag 30:25–31. https://doi.org/10.1016/j.jairtraman.2013.04.002
Alhussein SN (2011) Analysis of ground access modes choice King Khaled international airport, Riyadh, Saudi Arabia. J Transp Geogr 19(6):1361–1367. https://doi.org/10.1016/j.jtrangeo.2011.07.007
Baaj MH, Mahmassani HS (1991) An Al-based approach for transit route system planning and design. J Adv Transp 25(2):187–210. https://doi.org/10.1002/atr.5670250205
Bao DW, Di ZW, Zhang TX (2019) A reliability-based method for optimizing airport collection and distribution network. Concurrency Comput 30(4):e4733. https://doi.org/10.1002/cpe.4733
Beijing Capital International Airport Co., Ltd (2018) Annual Report, 2019. Beijing Capital International Airport Co., Ltd
Bell MGH, Liu X, Angeloudis P, Fonzone A, Hosseinloo SH (2013) A cost-based maritime container assignment model. Transport Res Part B: Methodol 58:58–70. https://doi.org/10.1016/j.trb.2013.09.006
Bergener J, Javid M, Seneviratne P (2011) Planning and analysis of airport access using GIS: SLCIA Example. Int Air Transport Conf 89–95
Bérubé JF, Gendreau M, Potvin JY (2009) An exact ϵ-constraint method for bi-objective combinatorial optimization problems: Application to the Traveling Salesman Problem with Profits. Eur J Oper Res 194(1):39–50. https://doi.org/10.1016/j.ejor.2007.12.014
Bruno G, Laporte G (2002) An interactive decision support system for the design of rapid public transit networks. Infor 40(2):111–118. https://doi.org/10.1080/03155986.2002.11732645
Castillo-Manzano JI, González-Laxe F, López-Valpuesta L (2013) Intermodal connections at Spanish ports and their role in capturing hinterland traffic. Ocean Coast Manag 86:1–12. https://doi.org/10.1016/j.ocecoaman.2013.10.003
Ceder A, Wilson NHM (1986) Bus network design. Transport Res Part B: Methodol 20:311–344. https://doi.org/10.1016/0191-2615(86)90047-0
Ceder A (2016) Public transit planning and operation: Modeling, practice and behavior. CRC Press
Choo S, You S, Lee H (2013) Exploring characteristics of airport access mode choice: a case study of Korea. Transp Plan Technol 36(4):335e351. https://doi.org/10.1080/03081060.2013.798484
Cohon JL (2003) Multiobjective programming and planning. Dover Publications, Mineola, NY
Current JR, Velle CR, Cohon JL (1985) The maximum covering/shortest path problem: A multiobjective network design and routing formulation. Eur J Oper Res 21(2):189–199. https://doi.org/10.1016/0377-2217(85)90030-X
Dicesare F (1970) A system analysis approach to urban rapid transit guide way location. Carnegie Mellon University, Pittsburgh, p 1970
Gao ZY, Sun HJ, Shan LL (2002) A continuous equilibrium network design mode land algorithm for transit systems. Transport Res Part B: Methodol 38:235–250. https://doi.org/10.1016/S0191-2615(03)00011-0
Gokasar I, Gunay G (2017) Mode choice behavior modeling of ground access to airports: A case study in Istanbul, Turkey. J Air Transp Manag 59:1–7. https://doi.org/10.1016/j.jairtraman.2016.11.003
Guo RG (2017) Optimal Routing Design of Customized Bus Based on Bus IC Data. Beijing Jiaotong University, Beijing
Gupta S, Vovsha P, Donnelly RM (2008) Air passenger preferences for choice of airport and ground access mode in the New York City Metropolitan Region. Transp Res Rec 2042(1):3–11. https://doi.org/10.3141/2042-01
Gutiérrez-Jarpa G, Donoso M, Obreque C, Marianov V (2010) Minimum cost path location for maximum traffic capture. Comput Ind Eng 58:332–341. https://doi.org/10.1016/j.cie.2009.11.010
Gutiérrez-Jarpa G, Laporte G, Marianov V, Moccia L (2017) Multi-objective rapid transit network design with modal competition: The case of Concepción. Chile Comp Operation Res 78(2):27–43. https://doi.org/10.1016/j.cor.2016.08.009
Gutiérrez-Jarpa G, Obreque C, Laporte G, Marianov V (2013) Rapid transit network design for optimal cost and origin–destination demand capture. Comp Operation Res 40(12):3000–3009. https://doi.org/10.1016/j.cor.2013.06.013
Han Y, Li W, Wei S, Zhang T (2018) Research on passenger’s travel mode choice behavior waiting at bus station based on SEM-logit integration model. Sustainability 10(6):1996. https://doi.org/10.3390/su10061996
He XZ, Guo XC (2014) Transport planning of high speed railway hub. Planners 30(2):53–58
Hu ZG (2004) A study of the best theoretical value of Gini coefficient and its concise calculation formula. Econ Res 9:60–69
Iannone F (2012) The private and social cost efficiency of port hinterland container distribution through a regional logistics system. Transport Res Part A: Policy Pract 46(9):1424–1448. https://doi.org/10.1016/j.tra.2012.05.019
Jou RC, Hensher DA, Hsu TL (2011) Airport ground access mode choice behavior after the introduction of a new mode: A case study of Taoyuan International Airport in Taiwan. Transport Res Part E: Logist Transport Rev 47(3):371–381. https://doi.org/10.1016/j.tre.2010.11.008
Laporte G, Marin A, Mesa JA, Perea F (2011a) Designing robust rapid transit networks with alternative routes. J Adv Transp 45(1):54–65. https://doi.org/10.1002/atr.132
Laporte G, Mesa JA, Ortega FA, Perea F (2011b) Planning rapid transit networks. Socio Econ Plan Sci 45(3):95–104. https://doi.org/10.1016/j.seps.2011.02.001
Laporte G, Mesa JA (2015) The design of rapid transit networks. In Location science (pp. 581–594). Springer, Cham. https://doi.org/10.1007/978-3-319-13111-5_22
Liang M, Zhang HM, Ma R, Wang W, Dong C (2021) Cooperatively coevolutionary optimization design of limited-stop services and operating frequencies for transit networks. Transport Res Part C: Emerging Technol 125:103038. https://doi.org/10.1016/j.trc.2021.103038
Mahmassani HS (2002) Strategies for airport accessibility. University of Texas at Austin, Center for Transportation Research
Matlsziw TC, Murray AT, Kim C (2006) Strategic route extension in transit networks. Eur J Oper Res 171:611–673. https://doi.org/10.1016/j.ejor.2004.09.029
Mavrotas G, Florios K (2013) An improved version of the augmented ε-constraint method (AUGMECON2) for finding the exact pareto set in multi-objective integer programming problems. Appl Math Comput 219(18):9652–9669. https://doi.org/10.1016/j.amc.2013.03.002
Nicholson A, Du ZP (1997) Degradable transportation systems: an integrated equilibrium model. Transport Res Part B: Methodol 31(3):209–223. https://doi.org/10.1016/S0191-2615(96)00022-7
Pan YR, Deng W (2010) Calculation connectivity reliability of road networks based on recursive decomposition arithmetic. J Southeast Univ 24(1):85–89
Perugia A, Moccia L, Cordeau JF, Laporte G (2011) Designing a home-to-work bus service in a metropolitan area. Transport Res Part B: Methodol 45(10):1710–1726. https://doi.org/10.1016/j.trb.2011.05.025
Pasha MM, Hickman MD, Prato CG (2020) Modeling Mode Choice of Air Passengers’ Ground Access to Brisbane Airport. Transp Res Rec 2674(11):756–767. https://doi.org/10.1177/0361198120949534
Qin CC (2007) Study on the planning of ground access system for mega-airports. Shanghai: Tongji Unversity
Robert H, Francis X, William J, Seth B (2010) Planning and design of airports. The McGrew-Hill Press
Savas ES (1978) (1978) On equity in providing public services. Manage Sci 24(8):800–808. https://doi.org/10.1287/mnsc.24.8.800
Shadkam E, Jahani N (2015) A hybrid COAepsilon $-constraint method for solving multi-objective problems. arXiv preprint arXiv:1509.08302. https://doi.org/10.5121/ijfcst.2015.5503
Shen X, Feng S, Li Z, Hu B (2016) Analysis of bus passenger comfort perception based on passenger load factor and in-vehicle time. Springerplus 5(1):1–10
Southworth F, Peterson BE (2000) Intermodal and international freight network modeling. Transport Res Part C: Emerging Technol 8(1–6):147–166. https://doi.org/10.1016/S0968-090X(00)00004-8
Sun WH (2014) ILOG CPLEX and railway transportation optimization. China Railway Press 2014
Tam ML, Lam WH, Lo HP (2008) Modeling air passenger travel behavior on airport ground access mode choices. Transportmetrica 4(2):135–153. https://doi.org/10.1080/18128600808685685
Vuchic VR, Newell GF (1968) Rapid transit interstation spacing’s for minimum travel time. Transp Sci 2(4):303–339. https://doi.org/10.1287/trsc.2.4.303
Zhang GH, Hao Y, Zhou L (2010) Optimization of Regional Passenger Distributing Network for Large Airport. Urban Transport of China 8(4):33–40
Zhang L, Yang H, Wu D, Wang D (2014) Solving a discrete multimodal transportation network design problem. Transport Res Part C: Emerging Technol 49:73–86. https://doi.org/10.1016/j.trc.2014.10.008
Zhang N (2011) Optimization of a comprehensive transportation hub taking the airport as the main body. Comprehensive Transport 5(3):12–15
Acknowledgements
This research was supported by the Fundamental Research Funds for the Central Universities, (NO. NS2020047). The authors also would like to thank College of Civil Aviation of Nanjing University of Aeronautics and Astronautics for their contribution to the survey.
Funding
This research was funded by the Fundamental Research Funds for the Central Universities (NO. NS2020047).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing Interests
The authors have no other competing interests to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Bao, D., Tian, S., Li, R. et al. Multi-Objective Decision Method for Airport Landside Rapid Transit Network Design. Netw Spat Econ 22, 767–801 (2022). https://doi.org/10.1007/s11067-022-09571-y
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11067-022-09571-y