
Abstract
We propose a method to carry out an inequality assessment in a dynamic and cross-sectional framework, by applying the dynamic version of a suitable inequality index, such as the Gini coefficient, as a function of time. We use our methodology to a setup where the optimal value functions is the individuals’ income flows while the initial conditions characterize their level of wealth. When the Hamilton–Jacobi–Bellman system of equations can be solved in closed form, the monotone path of the income distribution is established. Extending the model according to a government intervention gives the possibility to study, first policy for reducing income inequality under a specific exogenous target, and second to minimise income inequality across individuals.
Similar content being viewed by others


1 Introduction
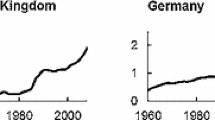
The rapid increase of income inequality in the past few decades is one of the most problematic issues widely discussed in the public debate. In most countries, capital accumulation has dramatically raised at the top wealth level, while consumption and savings have substantially decreased for the majority of the population. Such difference contributes to worsening income inequality in most western countries and creates the need to understand the origin and the changes in the income distribution. Figure 1 shows for instance the constant increase in the trend of income inequality in Italy in the last years.

Inequality in Italy: 2003–2017
Investigating their dynamic evolution is indeed necessary for policy targets aiming to control and even potentially reverse this trend justifying even public policy instruments like consumption or labor taxes. So far, however, there has been little work in the inequality literature that explicitly takes into account the evolution of the income inequality over time. It is the purpose of the present paper to make some progress in this direction, while modeling the different impact of initial wealth conditions on the unfair patterns of income distribution measured by the inequality index.
When considering a dynamic scenario, where the relevant income sources are functions of time, some different questions may arise: which are the most appropriate models to take into account for the evaluation of inequality over time? Is there a way to guarantee that the resulting inequality verifies its dynamic properties? Which elements of the model should be modified or manipulated to implement a policy aiming to reduce inequality or to keep income inequality below a certain threshold? And above all, can an inequality reduction issue be inserted into a typical payoff maximization problem?
First, we study some general conditions on capital accumulation that allow for a monotonic rise of income inequality over a finite time interval. The choice of a finite horizon model may seem unusual in this kind of literature, but we strongly uphold that it is useful and economically relevant to analyze the behavior of the accumulation of wealth to understand its effect in some short time periods. In this way, a better strategy for income inequality reduction can be addressed. Typically, governments and decision makers have to decide their strategies over a small number of years, consequently it makes sense to keep inequality under control during small periods. In our framework, we can observe how heterogeneity of initial wealth conditions influences the evolution of the optimal income value function of each agent and how much it contributes to the overall inequality. Second, inspired by the model of Lindner and Strulik (2004), we propose an optimisation problem where each agent maximises intertemporal utility from consumption and labour starting from different capital endowments. A natural consequence of this structure is that it is possible to apply an economic policy leading to the reduction of income inequality in the future periods. Plausible changes in consumption and labour tax may have a significant effect on the unfair distribution. Therefore we study the time paths of taxes and accumulated capital according to the optimal choice of a social planner. In particular, we focus on two policy options. First, the social planner may be interested in the reduction of income inequality under a specific target, or second, it can try to realise the process of minimising inequality after a time span.
The formal model developed below further generates some new technical insights. First, the dynamics of income inequality is captured according to the Gini coefficient. We define its properties under a dynamic context when the flow of the optimal income value functions are linear in the state variables of the model at hand. Introducing heterogeneity of initial wealth conditions as different endowments for each agent allows for establishing some general criteria for the monotonicity of the income functions over time. We then modify a typical growth model emphasizing the aspect of dynamic redistribution. We thus calculate agents’ optimal value functions in closed form, so that inequality assessment can be performed and observed in a finite time interval.
When such an option is possible, a policymaker observes the amount of capital accumulation and conceives a taxation strategy to minimise it or to prevent its excessive increase. Such a taxation is 2-dimensional because it is supposed to affect both labour and capital. Note that the purpose of our policy interventions is to reduce the inefficient allocations in an equality of opportunity perspective. In this view, labour source is considered as the variable of responsibility of individuals, while capital source is interpreted as a general family legacy which requires a dynamic intervention from the government. We do not aim to capture the general equilibrium effects but can provide a complete landscape in partial setting on how the government should play introducing a taxation frame on the determinants of income inequality.
To the best of our knowledge, our model is the first contribution that applies the concept of inequality issue into an optimal control structure. A fuller review of the related research with proper comparisons of the procedures is postponed in the next section. We finally observe how our model may have implications for empirical testing. For instance, using historical data, the model can be used as a predictor too, thus discovering the relative effect of the various parameters on expected income inequality. See Iacono and Ranaldi (2020) as a first contribution that addresses this concern in Italy for the period 1989-2016. Such line of investigation may constitute a fertile ground for future research.
The organisation of the paper is as follows. Section 2 describes the main contributions of the literature, while Sect. 3 sets up the basic structure of the Gini coefficient and establishes general properties on the monotonic evolution of income inequality. In Sect. 4, we propose a modified version of Lindner and Strulik (2004), and we determine the optimal value function for each agent in a finite time horizon. Section 5 applies such methodology proposing two policy interventions for reducing inequality. Section 6, finally, discusses the main results and concludes.
2 Related literature
The paper is related to the literature that examines the relationship between the extent of income inequality and socioeconomic determinants working via the optimisation problem of individuals, see Bertola et al. (2006).
The first strand of references is the one discussed in the field of inequality measurement. We apply the static Gini coefficient into a dynamic framework by looking at its monotonic stability properties over time. One of the first contributions of Gini is made by Shorrocks (1984). He proposes the so-called, natural property, with restrictions on the subsets of sources. According to this procedure, Lerman and Yitzhaki (1985) propose a covariance decomposition of the Gini index building on Fei et al. (1980). They obtain the impact of the marginal change of a given income source on overall inequality.Footnote 1 We are going to conceive our model by relying on the Gini index as well.
First, we reformulate the analysis by introducing a time dependent structure of the index; then we establish the monotonical conditions of its dynamics according to the optimal value functions of N agents. We propose a linear framework with heterogeneous initial capital conditions among agents.Footnote 2 The monotonic variations of these profiles ensure strict general conditions for the evolution of the wealth distribution. The literature proposes alternative criteria to measure income disparities. For instance, Ebert and Moyes (2007) introduce a Lorenz Dominance condition observing whether the effective progression in taxation may reduce inequality in a certain distribution, see even Marshall et al. (2011) for a highlighting book on the theory of Majorization with different applications.
By doing so, we investigate an intertemporal optimisation process of each agent with consumption and labour as inputs of their utility functions subject to the budget constraint. Our setting borrows initially from the contribution of Lindner and Strulik (2004), according to Alesina and Rodrik (1994). Our approach extends their original scenario with a further dependence in the individuals’ payoff structure. Differently, from Lindner and Strulik (2004), where individuals only choose their consumption level, we also consider labour as a strategic variable. Note that the use of an individual payoff function formulated as a bundle of consumption and labour has often occurred in literature, especially in dynamic macroeconomic models. Golosov et al. (2003) propose a similar analysis in a model of optimal taxation of the capital income, and alternatively, Liu and Turnovsky (2005) focus on the investigation of production and consumption externalities in the long-run. Another difference compared to Lindner and Strulik (2004) is the adoption of a finite horizon model that allows us to obtain more general results looking at the subintervals of the inequality. This is extremely helpful to implement and capture the efficacy of the proposal interventions to reduce income inequality.
This gives us the opportunity to discuss two alternative policy strategies matching the procedures discussed above. There have been many contributions analysing the mechanics of the different variants of consumption and labour taxation by looking at their potential efficient and distributional aspects. Interestingly, Bernasconi and Profeta (2012) investigate the relation between taxation and public redistribution in a discrete dynamic structure with overlapping generations. Our analysis extended this discussion by looking at a social planner with two different tasks. On one side, the idea would be reducing inequality below a specific exogenous target in a finite time horizon under optimal control. On the other side, the social planner may decide to impose a certain level of taxation on consumption and labour to minimise the overall inequality in a specific range of time.
Our interpretation of labour, capital and consumption as inputs and outcome in the utility functions even combines with the recent literature on equality of opportunity, see Pignataro (2012). Usually, labour is interpreted as a variable of responsibility of individuals. It identifies a factor over which individuals have control, while of course, the individual cannot be responsible for the amount of capital inherited for instance from the family. It implies that from social planner’s viewpoint, taxing capital should be considered more objectionable from moral equality of opportunity and even much more volatile. However, we should point out that labour taxation primarily involves the poor and middle classes. This is one of the reasons why in our simple applications we model taxation on both consumption and labour. In the perspective of equality of opportunity, an analysis of long-term effects have been recently proposed by Aaberge et al. (2011) while a comparison between ex ante and ex post equality of opportunity has been proposed by Fleurbaey and Peragine (2013).
3 The dynamics of inequality
We focus on an economy that is populated by N agents in a finite time interval \(I=[0,T]\). The choice of a finite horizon is reasonable in our context as we are studying the dynamic process of inequality also from the viewpoint of the policymakers. It is well-known that policymakers must decide their fiscal strategies, i.e., the potential taxation of agents’ consumption and labour, over a short time period, typically some years. For this reason, an infinite horizon model, despite being more common in economic models, would be definitely less realistic in terms of political decisions and of taxation efficacy.
Let us define \(J_{i}^{*}(t)\) the outcome function of the i-th agent at time \(t\in I\). We first look at the dynamic consistency of the Gini Coefficient, where the time-dependent functions involve the incomes accrued to the agents,Footnote 3\(^{,}\)Footnote 4
To ensure that \({\mathcal {G}}(t)\) is well-defined, Eq. (1) requires that for \(\forall t\in I\), there exists at least one j such that \( J_{j}^{*}(t)\ne 0\). In this presentation we assume there are no dynamic interactions among agents, and therefore this model cannot be presented as a standard differential game. It can be described instead as a collection of optimal control problems, each one of them played by a single agent. According to the theory of optimal control,Footnote 5 the choice of the solution concept is particularly relevant. In principle, different kinds of solution concepts can be applied, and a typical prerogative of the related analyses is the choice of one specific solution concept for technical reasons. As general as possible, we assume the existence of a Nash equilibrium as agents’ optimal strategy which can be either open-loop, closed-loop or feedback, depending on the structure of the problem. Note that no steady-state analysis is carried out because the model’s horizon is finite. In the solution of the model, we determine its feedback Nash equilibrium as it represents a complete solution involving dependence on the initial conditions. In particular, denote \(K_{it}\) as the amount of the i-th capital available at \(t\in [0,T]\), and the i-th optimal value function of the income flow is \(V_{i}(K_{it},t)\) as the i-th individual’s discounted payoff at \( t\in [0,T]\). We can now replace \(J_{i}^{*}(t)\) with \( V_{i}(K_{it},t)\) measuring the agent’s income payoff function rather than his profile such that:
to gauge unfair distribution of the income flows through the use of Gini coefficient. If for all \(i=1,\ldots , N\), the optimal value functions \( V_{i}(\cdot )\) are linear and only depend on \(K_{it}\) and t, i.e., there exist N functions \(A_{i}(t)\in C^{1}(I)\) and N functions \(B_{i}(t)\in C^{1}(I)\) such that \(V_{i}(K_{it})=A_{i}(t)+B_{i}(t)K_{it}\). In economic terms, this implies that the individual i’s income payoff at time t is composed by a wealth component \(A_{i}(t)\) interpreted as initial conditions in the distribution plus an accumulation process \(B_{i}(t)K_{it}\) with a different parametrization (trend) among individuals. \(A_{i}(t)\) identifies the stock variable in our framework.
In this case, the modified Gini index of the model is:
Once defined the dynamic Gini coefficient, we can verify different properties of the index over a finite horizon. In particular, the following proposition reformulates the structure of the Gini ratio when the initial wealth conditions \( A_{i}(t)\) are equal among agents, while capital endowments (and their related coefficients) are monotonically increasing at time t. Such requirements are pretty general as measuring the income inequality trend simply requires a different accumulation process among individuals even without disparities in the initial conditions. The next Proposition summarizes the results proposing a simplified formulation under certain symmetry assumptions.
Proposition 1
If at time \(t \in I\), the following conditions are verified:
-
1.
\(A_i(t)=A_j(t)=A(t)\) for all \(i \ne j\), \(i,j=1, \ldots , N\);
-
2.
\(K_{1t} \le K_{2t} \le \cdots \le K_{Nt}\);
-
3.
\(B_1(t) \le B_2(t) \le \cdots \le B_N(t)\);
then the Gini index at time t can be reformulated as follows:
Proof
See Appendix. \(\square \)
It is worth to note that under Eq. (4), inequality can be assessed at each instant of the interval I. When \(t=0\), the evaluation of inequality considers the whole path in the analysis and a complete picture of the unfair distribution is captured. If instead, the evaluation is carried out at the final time \(t=T\), by construction all discounted profit flows \(V_{j}(K_{jT},T)\) are equal to the scrap values \(e^{-\rho T}K_{jT}\). Hence the Gini index boils down to:
In other words, if no dynamics occurs, i.e., the model is basically static, the inequality is perfectly maintained: a typical outcome under circumstances where no inequality-reducing policy can be implemented. The above properties are both due to a well-known property of such indices: scale independence.
Interestingly, we can push the analysis a bit further. We can indeed try to understand if the heterogeneity of initial conditions may realise a monotonic increase of income inequality over time.
We are going to expose some results and examples to provide a mathematical structure which underlies the analysis of the dynamic behaviour of the Gini index. Before proceeding, we briefly outline our approach.
We intend to make our assumptions as general as possible and for this reason we will not impose conditions on the whole time interval under consideration, which would be too restrictive. Namely, we are going to consider any possible decomposition of I such that the dominance of the functions may be reversed from one subinterval to the following one. This means that the analysis on the derivative of the Gini index with respect to time is basically local. The conditions stated in Lemma 1, Proposition 2 and Lemma 2 are criteria to capture the local behaviour of the Gini index and of inequality itself.
Lemma 1
Given two functions \(f(t),g(t)\in C^{1}(I)\) and the function \(h(t):=\dfrac{|f(t)-g(t)|}{f(t)+g(t)}\), provided that there exists a decomposition of the interval
such that:
then the following results hold for h(t):
-
1.
\(h^{\prime }(t)>0\) at all \(t\in I_{2k}\) such that \(\left( \dfrac{f(t)}{ g(t)}\right) ^{\prime }>0\) and \(h^{\prime }(t)<0\) at all \(t\in I_{2k}\) such that \(\left( \dfrac{f(t)}{g(t)}\right) ^{\prime }<0\), for all \(k=1,\ldots , \dfrac{M}{2}\);
-
2.
\(h^{\prime }(t)>0\) at all \(t\in I_{2k+1}\) such that \(\left( \dfrac{f(t) }{g(t)}\right) ^{\prime }<0\) and \(h^{\prime }(t)<0\) at all \(t\in I_{2k}\) such that \(\left( \dfrac{f(t)}{g(t)}\right) ^{\prime }>0\), for all \( k=0,\ldots ,\dfrac{M}{2}-1\);
Proof
See Appendix. \(\square \)
If one of the 2 above functions is larger than the other one over the whole interval under consideration, the behaviour of h(t) is even easier to be determined. In particular,
Corollary 1
Given two functions \(f(t),g(t)\in C^{1}(I)\), if \( f(t)\ge g(t)\) for all \(t\in I\), then h(t) is:
-
increasing at each \(t\in I\) such that \(\left( \dfrac{f(t)}{g(t)} \right) ^{\prime }>0\);
-
decreasing at each \(t\in I\) such that \(\left( \dfrac{f(t)}{g(t)} \right) ^{\prime }<0\).
On the other hand, given two functions \(f(t),g(t)\in C^{1}(I)\), if \( f(t)\le g(t)\) for all \(t\in I\), then h(t) is:
-
increasing at each \(t\in I\) such that \(\left( \dfrac{f(t)}{g(t)} \right) ^{\prime }<0\);
-
decreasing at each \(t\in I\) such that \(\left( \dfrac{f(t)}{g(t)} \right) ^{\prime }>0\).
Inequality measured by the static version of the Gini coefficient is merely a snapshot of outcomes. It does not tell why income disparities have opened up or what the trend is over time. The picture can thus be misleading of the issue at hand. We solve this problem by taking into account the unfair distribution in a subinterval and searching for the wealth conditions that allow income gaps to increase. Indeed Lemma 1 and Corollary 1 shows that it is always possible to establish dominance condition of functions f(t) and g(t) for \(N=2\) case such that the ratio of the two derivatives monotonically increases or decreases in a subinterval. If the dominance conditions are always satisfied in I, then the monotone trend is even more remarkable. The following Example simply outlines a scenario in which the subintervals where h(t) is increasing and decreasing are explicitly determined (Fig. 2).

Functions f(t) and g(t) and the two subintervals \(I_1\) and \(I_2\)
Example 1
Consider the two linear functions \(f(t)=1+t\) and \(g(t)=2+\dfrac{t}{2}\) in the interval \(I=[0,\ 4]\).
It is immediate to check that \(f(t)\le g(t)\) in \(I_{1}=[0,\ 2]\) and \( f(t)\ge g(t)\) in \(I_{2}=[2,\ 4]\), therefore the function h(t) is:
Since
for all \(t\in I\), then by the above results \(h^{\prime }(t)<0\) in \(I_{1}\) and \(h^{\prime }(t)>0\) in \(I_{2}\).
Studying the dynamics of income disparities may provide at least a partial answer to understanding the initial wealth conditions and their likely trajectory over time. This is possible by simply replacing the general properties of f(t) and g(t) in Lemma 1 with the optimal payoff \( V_{1}(K_{1t},t)\) and \(V_{2}(K_{2t},t)\). In particular, for \(N=2\) case, the dynamic Gini coefficient boils down to:
Relying on (6) and its similarity with function h(t), the next Proposition relabels Lemma 1 in the context of linear value functions to describe the behaviour of G(t) over time.
Proposition 2
Consider a 2-agents model, where agents’ payoff profiles are described by value functions \( V_{i}(K_{it},t)=A_{i}(t)+K_{it}B_{i}(t)\), where agents have \((K_{1t},K_{2t})\) as the initial capital endowments, for \(i=1,2\). Assume that there exists a decomposition of the interval
such that:
then the following results hold for G(t):
-
1.
\({\mathcal {G}}^{\prime }(t)>0\) at all \(t\in I_{2k}\) such that \(\left( \dfrac{A_{1}(t)+K_{1t}B_{1}(t)}{A_{2}(t)+K_{2t}B_{2}(t)}\right) ^{\prime }>0\) and \({\mathcal {G}}^{\prime }(t)<0\) at all \(t\in I_{2k}\) such that \(\left( \dfrac{A_{1}(t)+K_{1t}B_{1}(t)}{A_{2}(t)+K_{2t}B_{2}(t)}\right) ^{\prime }<0\) , for all \(k=1,\ldots ,\dfrac{M}{2}\);
-
2.
\({\mathcal {G}}^{\prime }(t)>0\) at all \(t\in I_{2k+1}\) such that \(\left( \dfrac{A_{1}(t)+K_{1t}B_{1}(t)}{A_{2}(t)+K_{2t}B_{2}(t)}\right) ^{\prime }<0\) and \({\mathcal {G}}^{\prime }(t)<0\) at all \(t\in I_{2k}\) such that \(\left( \dfrac{A_{1}(t)+K_{1t}B_{1}(t)}{A_{2}(t)+K_{2t}B_{2}(t)}\right) ^{\prime }>0\) , for all \(k=0,\ldots ,\dfrac{M}{2}-1\);
Proof
See Appendix. \(\square \)
Proposition 2 claims that differences among classes, in this simple case, between richer and poorer classes, e.g., \(A_{1}(t)\ge A_{2}(t)\) and \(K_{1t}B_{1}(t)\ge K_{2t}B_{2}(t)\), necessarily originate a systemic increase of inequality as \({\mathcal {G}}^{\prime }(t)>0\). If the dominance condition is large in I, then this means that differences in initial wealth among classes create greater disparities between rich and poor that cannot be inverted or reduced without interventions. This helps to explain why the income gap between rich and poor began to widen due to capital accumulation as confirmed by empirical evidence. See for instance an interesting analysis recently made in Italy by Iacono and Ranaldi (2020) on this issue. They show the evolution of inequality in both capital and labor income between 1989 and 2016. Similar results are made by Ranaldi (2021) looking at the global distributions of capital and labor income among individuals in 2000 and 2016. The extension of previous results to the \(N-\)individuals case is somewhat complex, because the number of involved functions and the related intervals to be considered, grows dramatically. However, we can establish sufficient conditions to ensure that G(t) has a monotonic behaviour at certain intervals. The next Lemma and Proposition resemble Lemma 1 and Proposition when agents are \(N>2\).
Lemma 2
Given N functions \(f_{1}(t),\ldots ,f_{N}(t)\), and the functions
for all \(i,j=1,\ldots ,N\), provided that for all \(i\ne j\) there exists a decomposition of the interval
such that:
then the following results hold for all \(h_{ij}(t)\), \(i\ne j\):
-
1.
\(h_{ij}^{\prime }(t)>0\) at all \(t\in I_{2k}^{ij}\) such that \(\left( \dfrac{f_i(t)}{f_l(t)}\right) ^{\prime }>0\) for all \(l \ne i\) and \(\left( \dfrac{f_l(t)}{f_j(t)}\right) ^{\prime }>0\) for all \(l \ne i,j\); moreover, \( h_{ij}^{\prime }(t)<0\) at all \(t\in I_{2k}^{ij}\) such that \(\left( \dfrac{ f_i(t)}{f_l(t)}\right) ^{\prime }<0\) for all \(l \ne i\) and \(\left( \dfrac{ f_l(t)}{f_j(t)}\right) ^{\prime }<0\), for all \(l \ne i,j\), for all \( k=1,\ldots ,\dfrac{M_{ij}}{2}\);
-
2.
\(h_{ij}^{\prime }(t)>0\) at all \(t\in I_{2k+1}^{ij}\) such that \(\left( \dfrac{f_i(t)}{f_l(t)}\right) ^{\prime }<0\) for all \(l \ne i\) and \(\left( \dfrac{f_l(t)}{f_j(t)}\right) ^{\prime }<0\) for all \(l \ne i,j\); moreover, \( h_{ij}^{\prime }(t)<0\) at all \(t\in I_{2k+1}^{ij}\) such that \(\left( \dfrac{ f_i(t)}{f_l(t)}\right) ^{\prime }>0\) for all \(l \ne i\) and \(\left( \dfrac{ f_l(t)}{f_j(t)}\right) ^{\prime }>0\), for all \(l \ne i,j\), for all \( k=1,\ldots ,\dfrac{M_{ij}}{2}-1\).
Proof
See Appendix. \(\square \)
It is simple to note why Lemma 2 relates to the function \(h(t)=\sum _{i>j}h_{ij}(t)\), which is proportional to \({\mathcal {G}} (t) \) if \(f_{i}(t)=J_{i}^{*}(t)\) for all \(i=1,\ldots ,N\). Hence, that result provides a sufficient condition to determine the behaviour of \( {\mathcal {G}}(t) \). If the above conditions do not hold, then Lemma cannot be employed and it is necessary to study function h(t) in the standard way.
The next Example amends the previous one by adding a third function to treat the 3-individuals case. As will be shown, Lemma 2 is not useful in this context, hence the normal calculation of the first order derivative will be carried out (Fig. 3).

Functions \(f_1(t), f_2(t), f_3(t)\) and the two subintervals \(I_1\) and \(I_2\)
Example 2
Consider the 2 linear functions \(f_1(t)=1+t\) and \(f_2(t)=2+\dfrac{t}{2}\) and the constant function \(f_3(t)=3\) in the interval \(I=[0,\ 4]\).
It is immediate to check that \(f_3(t)\ge f_2(t)\ge f_1(t)\) in \(I_{1}=[0,\ 2]\) and \(f_1(t)\ge f_2(t) \ge f_3(t)\) in \(I_{2}=[2,\ 4]\), therefore the relevant functions are:
Note that in this case, \(h_{12}(t)=h_{23}(t)\) over both intervals, then the behaviour of both functions is the same. Since
then \((h_{13})^{\prime }(t)>0\) in \(I_{1}\) and \((h_{13})^{\prime }(t)<0\) in \( I_{2}\). However, the hypotheses of Lemma 2 are only verified for \(h_{13}(t)\). Namely, as far as \(h_{12}(t)\) is concerned:
meaning that one derivative does not have the appropriate sign. Then, in order to state a unique condition for the behaviour of function h(t), we have to calculate its derivative. Note that:
The calculation of its derivative yields:
hence \(h^{\prime }(t)<0\) in \(I_{1}\) and \(h^{\prime }(t)>0\) in \(I_{2}\).
The next Proposition illustrates the application of Lemma (2) to tackle the N-individuals case.
Proposition 3
Consider an N-agents model, where agents’ payoff profiles are described by the income value functions \( V_{i}(K_{it},t)=A_{i}(t)+K_{it}B_{i}(t)\), for \(i=1,\ldots ,N\), where agents have \((K_{1t},\ldots ,K_{Nt})\) as the initial capital endowments. Assume that for all \(i\ne j\) there exists a decomposition of the interval,
such that:
then the following results hold for \({\mathcal {G}}(t)\):
-
1.
\({\mathcal {G}}^{\prime }(t)>0\) at all \(t\in I_{2k}^{ij}\) such that
$$\begin{aligned} \left( \dfrac{A_{i}(t)+B_{i}(t)K_{it}}{A_{l}(t)+B_{l}(t)K_{lt}}\right) ^{\prime }>0\ \ \text { for all }\ \ l\ne i \end{aligned}$$and
$$\begin{aligned} \left( \dfrac{A_{l}(t)+B_{l}(t)K_{lt}}{A_{j}(t)+B_{j}(t)K_{jt}}\right) ^{\prime }>0\ \ \text { for all }\ \ l\ne i,j; \end{aligned}$$moreover, \({\mathcal {G}}^{\prime }(t)<0\) at all \(t\in I_{2k}^{ij}\) such that
$$\begin{aligned} \left( \dfrac{A_{i}(t)+B_{i}(t)K_{it}}{A_{l}(t)+B_{l}(t)K_{lt}}\right) ^{\prime }<0\ \ \text { for all }\ \ l\ne i \end{aligned}$$and
$$\begin{aligned} \left( \dfrac{A_{l}(t)+B_{l}(t)K_{lt}}{A_{j}(t)+B_{j}(t)K_{jt}}\right) ^{\prime }<0\ \ \text { for all }\ \ l\ne i,j, \end{aligned}$$for all \(k=1,\ldots ,\dfrac{M_{ij}}{2}\);
-
2.
\({\mathcal {G}}^{\prime }(t)>0\) at all \(t\in I_{2k}^{ij}\) such that
$$\begin{aligned} \left( \dfrac{A_i(t)+B_i(t)K_{it}}{A_l(t)+B_l(t)K_{lt}}\right) ^{\prime }<0 \ \ \text { for all } \ \ l \ne i \end{aligned}$$and
$$\begin{aligned} \left( \dfrac{A_l(t)+B_l(t)K_{lt}}{A_j(t)+B_j(t)K_{jt}}\right) ^{\prime }<0 \ \ \text { for all } \ \ l \ne i,j; \end{aligned}$$moreover, \({\mathcal {G}}^{\prime }(t)<0\) at all \(t\in I_{2k}^{ij}\) such that
$$\begin{aligned} \left( \dfrac{A_i(t)+B_i(t)K_{it}}{A_l(t)+B_l(t)K_{lt}}\right) ^{\prime }>0 \ \ \text { for all } \ \ l \ne i \end{aligned}$$and
$$\begin{aligned} \left( \dfrac{A_l(t)+B_l(t)K_{lt}}{A_j(t)+B_j(t)K_{jt}}\right) ^{\prime }>0 \ \ \text { for all } \ \ l \ne i,j, \end{aligned}$$for all \(k=1,\ldots ,\dfrac{M_{ij}}{2}\);
Proof
It is sufficient to apply Lemma 2 taking \( f_{i}(t)=A_{i}(t)+B_{i}(t)K_{it}\) for all \(i=1,\ldots ,N\). \(\square \)
Proposition 3 is a technical result which can be applied to each differential game model whose value functions are linear in the initial wealth endowments under some specific conditions on the time functions \(A_i(t)\) and \(B_i(t)\). Basically, the Proposition intends to apply Lemma 2 to \({\mathcal {G}}(t)\). The most intuitive interpretation suggests that if the dominance conditions specified in Lemma 2 are verified, then the trend of inequality may increase in the short run. On the other hand, if the ratio is always positive, then there are at least some intervals where inequality may reduce. This suggests that when income inequality increases, wealth disparities presented at the initial level constitute an important determinant of the trend over time, thus requiring appropriate policies to be implemented by the Government to keep income inequality at tolerably low levels.
Once the general properties of the evolution of inequality are defined, then we can start to investigate an optimisation process of a representative agent as a proxy for social welfare.
4 The dynamic optimization process
Here we devise a model à la Lindner and Strulik (2004) for the evaluation of the intertemporal payoff of each agent i. We extend their analysis describing the dynamics of the wealth accumulation taking the time paths of taxes and capital as given. In the next Section, we see the optimal strategy of a social planner that modifies the level of taxation for a specific target policy.
First, Lindner and Strulik (2004) propose a sequential asymmetric game between individuals and government. As mentioned in Sect. 3, we instead focus on the maximization process of each agent with no interaction among them. Our main purpose is to show the possibility to measure the evolution of income inequality and the policy evaluation from a social planner. Second, in their paper, the closed-loop equilibrium strategy is determined on an infinite time horizon, whereas we take into account a compact interval \(I=[0,T]\).
In our setting, each agent has two different control variables, i.e., consumption \(C_{i}(t)\) and labour \(l_{i}(t)\). In particular, each agent i, or \(i=1,\ldots ,N\), maximises her intertemporal utility function as follows:
where \(C_{i}(t)\in {\mathbb {R}}_{+}\) is an i-th control variable denoting consumption. The logarithmic utility form has been chosen for consumption in that it verifies the scale-independence property, which is standard in a framework with income heterogeneity among agents. The other control variable is labour, \(l_{i}(t)\in {\mathbb {R}}_+\), which is quadratic. The state variable is instead \(K_{i}(t)\in {\mathbb {R}}_{+}\) defined as the capital of agent i. Finally, \(\rho >0\) is the instantaneous discount factor, i.e., the discount rate of future payoffs, common to all individuals, while, \(e^{-\rho T}K_{i}(T)\) is the scrap value, namely the discounted value of one unit of capital at the final time. Note that \(K_{i}(0)\ne K_{j}(0)\) for \(\forall \) \(j\ne i\), \(\forall i=1,\ldots ,N\), are ordered in a non-decreasing way as \(K_{1}(0)\le K_{2}(0)\le \cdots \le K_{N}(0)\). The state dynamics for each agent i is as follows:
where \(\tau _{l}\ge 0\) is the tax rate on labour, \(\tau _{C}\ge 0\) is the tax rate on consumption and \(r_{i}>0\) is the i-th interest rate on personal capital endowment. Note that the assumption \(r_{i}\ne r_{j}\), \( \forall \) \(j\ne i\), \(\forall i=1,\ldots ,N\) implicitly establishes that 2 different agents have 2 different returns in capital accumulation. Relying on the above assumptions, the i-th Hamilton-Jacobi-Bellman (usually indicated by HJB) equation is:
Proposition 4
The solution of 9 is the following value function:
where
Proof
See Appendix. \(\square \)
By replacing Eqs. (10), (11), (12) into Eq. (3), we can measure income inequality of the community according to the intertemporal utility function of each agent. In particular, the behaviour of Gini Coefficient \({\mathcal {G}}(t)\) in Eq. (3) is determined by the application of Proposition 2.
5 Policy-target interventions
Widening wealth disparities may have damaging side-effects for the sustainability of the community. The mainstream consensus has long been on the opportunity for the Government to intervene inverting such trend. One interesting question in studying the evolution of inequality over time stands on the role of Government should play in helping the rest through the use of taxation instruments. Greater mobility of capital relative to labour ensured the trend towards reduced capital taxation was broadly shared. This is the reason why we focus on consumption and labour taxation as the main objects of our analysis. The ideal tax system strikes a balance between efficiency and equity such that different societies make different choices. In our simple framework of \(N=2\) agents, we imagine a benevolent social planner that on one side merely searches for reducing income inequality under a specific exogenous target, while on the other side, decides to minimize income inequality across individuals. As in the previous Section, we assume that agents’ initial capital endowments at time t are different, and it is not restrictive to posit \(K_{1t}\le K_{2t}\). Moreover, we focus on the case in which the return rates of capitals are equal, i.e., \( r_{1}=r_{2}\).
Given the formulation of the dynamic Gini index described by (6) and after some simplifications, its numerator is given by
whereas the denominator of (6) is:
If we consider \(t = 0\), we are evaluating the inequality assessment on the whole time interval [0, T], meaning that we are taking into account the quantity
The approaches we can adopt depend on the target policy to be implemented. In both cases, 2 optimal values of \(\tau _{C}\) and \(\tau _{l}\) must be determined at the end of the period [0, T]. Defining \(\tau _{C}^{*}\) and \(\tau _{L}^{*}\) the optimal taxes and according to the original formulation, the i-th dynamic constraint is,
5.1 A policy for bounded inequality
There are 2 viable approaches that can be adopted. One of them is based on \(\tau _C\) and the other one on \(\tau _l\).
Firstly, consider an upper bound of inequality \({\mathcal {I}}_{max}\) acceptable by the Government such that \({\mathcal {G}}(0)\le {\mathcal {I}}_{max}\). According to Eqs. (7) and (14), solving for \( \tau _{C}\) leads to the identification of a specific portion of the \((\tau _{l},\tau _{C})\)-plane where the overall inequality does not exceed the level \({\mathcal {I}}_{max}\). After some algebraic steps, it follows that \({\mathcal {G}}(0)\) can be rearranged as followsFootnote 6:
where the following functions are quadratic in \(\tau _l\):
and the above constant is
Imposing the inequality condition on the Gini index leads to a linear inequality on \(\tau _C\):
where the left-hand side of the inequality is a linear expression in \(\tau _C\), whereas the right-hand side of the inequality is quadratic in \(\tau _l\).
Given the form we obtained for the inequality, a this stage another approach can be adopted. We might also establish a certain tax rate on consumption, say \(\tau _{C}=\tau _{C}^{*}\), to subsequently determine the interval for \(\tau _{l}\) as \( {\mathcal {G}}(0)\le {\mathcal {I}}_{max}\). Provided that the parameter values allow for the existence of solutions, solving the second degree inequality for \(\tau _{l}\) would identify an interval
such that, for all tax rates \(\tau _l\) belonging to 15, the Gini level is bounded. The parameter set is bounded from below because tax rates are supposed to be positive and from above by the parabola described by the associated equation. The following Figure intends to illustrate the present case. If we sketch the curve describing the function of \(\tau _l\) in the right-hand side of the above inequality, we know that at each given level of \(\tau _C^*\), the tax rate on labour \(\tau _l\) must be included in the compact interval \(\left( \underline{\tau }_l, \ {\overline{\tau }}_l \right) \) and below the graph of the function, as is shown in Fig. 4.

The portion of the plane \((\tau _l, \tau _C)\) where inequality does not exceed \({\mathcal {I}}_{max}\)
5.2 Minimization of inequality
Instead, when the Government commits to reducing income inequality over the whole period [0, T], the related problem directly involves the minimization process of the Gini coefficient:
without irrelevant constants. Minimizing \({\mathcal {G}}(0)\) with respect to \( \tau _{l}\) and \(\tau _{C}\) yields the optimal tax rate for \(\tau _{l}\):
whereas, since the expression \(\dfrac{\partial {\mathcal {G}}(0)}{\partial \tau _{C}}>0\) for all \(\tau _{C}>0\), there is no finite value of \(\tau _{C}\) which minimizes the inequality level. Considering a fixed value \(\tau _{C}= {\widetilde{\tau }}_{C}\), we can evaluate inequality for \(\tau _{l}=\tau _{l}^{*}\):
If the Government really wants to increase agents’ welfare, it could do so by axing tax rules that reduce income gap between individuals after a period of time. The options in our simple framework are twofold. The Government decides to maximize continuous social welfare of agents by looking at the difference of the individual payoffs that satisfied an exogenous upper bound. Alternatively, the dynamic process may require merely the minimisation of inequality of the income distribution. Of course, such policies have some effects for labour supply which are outside the scope of this analysis. Although it is not possible to make a general comparison between the two policies, results in terms of taxation simply suggest that minimizing inequality is costly for labour compared to the bounded one where a range of values is proposed under the optimal tax on consumption.
6 Concluding remarks
Although in this paper we made an attempt to propose a theoretical framework for a dynamic analysis of inequality, this topic is definitely far from being completely treated. We established a preliminary approach to incorporate assessment of inequality in a continuous time model where agents are heterogeneous and during the evolution of the economic process, inequality evolves as well.
Both technical and applied aspects can be improved and refined: the choice of the most appropriate inequality index, the validity of the solution concepts, the extension of the time horizon and the policy implementation of a planner which aims to reduce overall inequality. The issue of equality of opportunity in a dynamic scenario deserves to be treated as well: which characteristics of a dynamic multi-agent model can represent equality of opportunity? And which kind of intervention can be done to avoid that inequality of opportunity can transform into income inequality over time?
All the above questions may constitute a fertile ground for future research.
Notes
The literature on Gini index is very vast: his original paper (Gini, 1997) was published in Italian in 1912.
A similar analysis can be proposed by investigating the Atkinson index (see (Atkinson, 1970)) \({\mathcal {I}}_{A}:I\longrightarrow {\mathbb {R}}\) as follows:
$$\begin{aligned} {\mathcal {I}}_{A}(t)=1-\dfrac{N^{\frac{\epsilon }{\epsilon -1}}\left[ \sum _{j=1}^{N}(J_{j}^{*}(t))^{1-\epsilon }\right] ^{\frac{1}{1-\epsilon } }}{\sum _{j=1}^{N}J_{j}^{*}(t)}. \end{aligned}$$For an exhaustive overview of these solution concepts in differential games, see Dockner et al. (2000).
The notation has been modified for the sake of simplicity.
Such calculations are quite standard in literature, however all the steps are available upon request to the Authors.
Note that the expression for \({\widehat{A}}_i(t)\) makes sense under the condition \(\rho \ne 2 r_i\), otherwise it gets much easier.
References
Aaberge, R., Mogstad, M., & Peragine, V. (2011). Measuring long-term inequality of opportunity. Journal of Public Economics, 95(3), 193–204.
Alesina, A., & Rodrik, D. (1994). Distributive Politics and Economic Growth. The Quarterly Journal of Economics, 109(2), 465–490.
Atkinson, A. B. (1970). On the measurement of inequality. Journal of Economic Theory, 2(3), 244–263.
Bernasconi, M., & Profeta, P. (2012). Public education and redistribution when talents are mismatched. European Economic Review, 56(1), 84–96.
Bertola, G., Foellmi, R., & Zweimüller, J. (Eds.). (2006). Income Distribution in Macroeconomic Models. Princeton University Press.
Dockner, E. J., Jorgensen, S., Long, N. V., & Sorger, G. (2000). Differential Games in Economics and Management Science. Cambridge: Cambridge Books.
Ebert, U., & Moyes, P. (2007). Income taxation with labor responses. Journal of Public Economic Theory, 9, 653–682.
Fei, J., Ranis, G., & Kuo, W. Y. (1980). Growth and the family distribution of income by factor components. Quarterly Journal of Economics, 92(1), 452–473.
Fleurbaey, M., & Peragine, V. (2013). Ex ante versus ex post equality of opportunity. Economica, 80(317), 118–130.
Gini, C. (1997). Concentration and dependency ratios. Rivista di Politica Economica, 87, 769–792.
Golosov, M., Kocherlakota, N., & Tsyvinski, A. (2003). Optimal indirect and capital taxation. The Review of Economic Studies, 70(3), 569–587.
Kets, W., Iyengar, G., Sethi, R., & Bowles, S. (2011). Inequality and network structure. Games and Economic Behavior, 73(1), 215–226.
Iacono, R., & Ranaldi, M. (2020). Poor Laborers and Rich Capitalists? On the Evolution of Income Composition Inequality in Italy 1989–2016, Stone Center Working Paper Series, No. 13,
Lerman, R., & Yitzhaki, S. (1985). Income inequality by income sources: A new approach and application to the United States. Review of Economics and Statistics, LXVII(1), 151–156.
Lindner, I., & Strulik, H. (2004). Distributive politics and economic growth: The Markovian Stackelberg solution. Economic Theory, 23(2), 439–444.
Liu, W. F., & Turnovsky, S. J. (2005). Consumption externalities, production externalities, and long-run macroeconomic efficiency. Journal of Public Economics, 89(5), 1097–1129.
Marshall, A. W., Olkin, I., & Arnold, B. C. (2011). Inequalities: Theory of majorization and its applications. Springer series in statistics (2nd ed.). New York: Springer.
Mornet, P. (2016). On the axiomatization of the weakly decomposable inequality indices. Mathematical Social Sciences, 83, 71–78.
Palestini, A., & Pignataro, G. (2016). A graph-based approach to inequality assessment. Physica A: Statistical Mechanics and its Applications, 455, 65–78.
Pignataro, G. (2012). Equality of opportunity: Policy and measurement paradigms. Journal of Economic Surveys, 26(5), 800–834.
Plata-Pérez, L., Sánchez-Perez, J., & Sánchez-Sánchez, F. (2015). An elementary characterization of the Gini index. Mathematical Social Sciences, 74, 79–83.
Ranaldi, M (2021). Global distributions of capital and labor incomes: Capitalization of the global middle class, Stone Center Working Paper Series, No. 30
Shorrocks, A. (1984). Inequality decomposition by population subgroups. Econometrica, 52(6), 1369–1385.
Acknowledgements
The Authors thank Giorgio Basevi, Michael Heinrich Baumann, Chiara Binelli, Alessandra Buratto, Roberto Cellini, Vittoria Cerasi, Giorgio Fabbri, Astrid Gamba, Luca Lambertini, Catherine Liberati, Marco Mantovani, Piergiovanna Natale, Matteo Pelagatti, Tito Pietra and the audiences at the 13th Meeting of the Society for Social Choice and Welfare in Lund (Sweden), at the 40th Annual Meeting of the Italian Association for Mathematics Applied to Economic and Social Sciences in Catania (Italy) and at the XVII Workshop on Quantitative Finance QFW2017 in Milan (Italy) for valuable comments and suggestions. The usual disclaimer applies.
Funding
Open access funding provided by Università degli Studi di Roma La Sapienza within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Proof of Proposition 1
Provided that \(A_{i}(t)=A_{j}(t) = A(t)\) for all \(i\ne j\), their sum amounts to NA(t) we can note that some contributions vanish in the sum at the numerator of \({\mathcal {G}}(t)\). Specifically, all the terms of the kind
vanish when \(i = j\). When \(i \ne j\), \(A_i(t) - A_j(t) = 0\) as well, hence what remains is:
Furthermore,
Hence, for all \(i \ne j\), assuming without loss of generality that \(i > j\), we have that
Consequently, since the j-th difference is equal to \((N-1-2j)B_{N-j}(t)K_{(N-j)t}\) for \(j=0,1,\ldots ,N-1\) , after collecting terms and simplifying, the form of Gini index becomes:
1.2 Proof of Lemma 1
Firstly, consider any subinterval \(I_{l}\), where l is an even integer number, where \(f(t)\ge g(t)\), implying \(h(t)=\dfrac{f(t)-g(t)}{f(t)+g(t)}\) for all \(t\in I_{l}\). Calculation of the derivative of h(t) yields:
which is positive if and only if \(\left( \dfrac{f(t)}{g(t)}\right) ^{\prime }>0\). On the other hand, it is negative if and only if \(\left( \dfrac{f(t)}{ g(t)}\right) ^{\prime }<0\). The second case is analogous: consider any subinterval \(I_{m}\), where m is an odd integer number. At every \(t\in I_{m} \), by definition of the subintervals, \(h(t)=\dfrac{-f(t)+g(t)}{ f(t)+g(t)}\). Carrying out the same analysis, where signs are reversed, we obtain that \(h^{\prime }(t)\) is positive if and only if \(\left( \dfrac{f(t)}{ g(t)}\right) ^{\prime }<0\). Finally, it is negative if and only if \(\left( \dfrac{f(t)}{g(t)}\right) ^{\prime }>0\).
1.3 Proof of Proposition 2
When only 2 agents are playing, we know the form of Gini index evaluated at \(t \in I\):
Therefore, because in the first case \( A_1(t)+B_1(t)K_{1t}>A_2(t)+B_2(t)K_{2t}>0\) and in the second case \( A_2(t)+B_2(t)K_{2t}>A_1(t)+B_1(t)K_{1t}>0\), we can apply Lemma , which ensures that \({\mathcal {G}}^\prime (t)>0\) for all \(t \in I\).
1.4 Proof of Lemma 2
The proof of Lemma 2 closely resembles the proof of Lemma 1. In this case, we identify a decomposition of the interval I for each pair of functions \(f_{i}(t)\) and \(f_{j}(t)\), thus extending the decomposition described in the 2-individuals case. We reproduce the same approach and find out that in each subinterval \( I_{2k}^{ij}\) where \(f_{i}(t)\ge f_{j}(t)\), for any \(i\ne j\), we calculate the following derivative:
which is positive if \(\left( \dfrac{f_{i}(t)}{f_{k}(t)}\right) ^{\prime }>0\) for all \(k\ne i\) and \(\left( \dfrac{f_{k}(t)}{f_{j}(t)}\right) ^{\prime }>0\) for all \(k\ne i,j\). Reversing signs in the above derivatives yields the negativity of \((h_{it})^{\prime }(t)\) in the same subintervals. The second thesis concerns the remaining subintervals of the decomposition, where the procedure is identical given that the sign of \(h_{ij}(t)\) is reversed.
1.5 Proof of Proposition 4
The standard solution procedure yields:
We guess the form \({\widehat{V}}_{i}(K_{it},t)={\widehat{A}}_{i}(t)+K_{it} {\widehat{B}}_{i}(t)\), where \({\widehat{A}}_{i}(t),\ {\widehat{B}}_{i}(t)\) are \( C^{1}(I)\) functions for all \(i=1,\ldots ,N\), for the i-th optimal value function. In this case, adopting the standard approach, we have that:
whose solution is determined by solving the following dynamic system:
endowed with the final conditions implied by the transversality conditions:
The dynamic system (18) can be simply solvedFootnote 7, leading to the following expression:
whereFootnote 8
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Palestini, A., Pignataro, G. Inequality assessment in a dynamic framework with heterogenous agents. Econ Polit 40, 469–494 (2023). https://doi.org/10.1007/s40888-022-00275-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40888-022-00275-7