
Abstract
Based on a cross-river tunnel of Wuhan Metro Line 8, we present a two-dimensional discrete element model for shield attitude adjustment considering the effect of overbreak cutters. The shield shell mechanics under the influence of over-excavation rate, over-excavation orientations, and overburden load are simulated, and the tunneling mechanics law and the ultimate range during the adjustment of the shield attitude are investigated. The simulation results indicate the following: (1) The greater the over-excavation rate, the smaller the force exerted by the soil layer in the negative direction of the shield movement; therefore, increasing the over-excavation rate is helpful in expanding the range of shield attitude adjustment. (2) The shield is stressed symmetrically while conducting positive and negative horizontal adjustments in the soil layer, which has a symmetrical distribution, but vertical upward adjustment is more difficult than vertical downward adjustment. (3) With the increase in overburden load, the space of the shield attitude adjustment is gradually reduced at the same over-excavation rate. A good engineering application was achieved in this project using the simulation model. It is recommended to use the attitude adjustment method by controlling the tunneling parameters. In difficult situations such as high overlying loads, the over-excavation cutter can be used to assist in adjusting the shield attitude.
Similar content being viewed by others

1 Introduction
With the continuous development and utilization of urban underground space, more stringent requirements are being put forward for the selection of subway tunnel lines and tunnel construction control [1, 2]. The density of the subway network makes the line shape of the shield tunnel increasingly complex, which increases the difficulty of shield attitude control during the construction process [3]. At present, the shield attitude is mainly controlled by adjusting the thrust of the jack, and it is strongly governed by the experience of the shield operator [4, 5].
The interaction between the shield and the soil must be considered when modeling the mechanical behavior of the shield tunneling process [6, 7]. In fact, the shield machine is greatly affected by the surrounding soil, and the soil pressure constrains the movement of the shield in the non-advance direction [8]. Therefore, the soil constraint is an important part of the shield load model, so as to improve the shield tunneling mechanical model [9]. For this reason, scholars have proposed soil spring, ground reaction curve, and other models to describe the effect of soil on the shield during shield tunneling [10, 11]. Based on the assumption that the tunneling process of the shield machine is quasi-static, Broere et al. [12] established dynamic mechanical models of the shield under different load conditions. Festa et al. [13] established four curve tunneling models considering the kinematic and geometric characteristics of shield tunneling. The above studies are all mechanism models that do not consider the influence of the overbreak cutter, and numerical simulation is an important method for solving this problem.
The precise control of shield attitude has increasingly become the core issue of shield tunneling in complex environments, and there are relatively few studies on this aspect at present. In actual engineering, since the diameter of the cutterhead is slightly larger than the diameter of the shield body, there is a certain gap between the excavation area and the outer surface of the shield body. Due to the inaccuracy of the jack control or the curve tunneling, the shield tunneling process usually presents a trend of "snake-like" motion [13, 14], as shown in Fig. 1. This is because the traditional manual attitude adjustment is susceptible to hysteresis and inaccuracy [15]. When the shield tunnels are in the permeable sand layer or under high water pressure, the requirements for attitude control are more stringent, and the construction risk is higher [16]. Yue et al. [17] designed a sliding mode robust controller and, based on this model, proposed an automatic control system for shield attitude and trajectory. The use of overbreak cutters is helpful for adjusting the shield attitude, especially in the sharp curve section [18, 19], which can reduce soil disturbance and construction risk. Based on the space vector analysis theory, Chen and Li [20] proposed a theoretical algorithm for the length and range of the overbreak cutter in a three-dimensional compound curve tunnel.

Shield “snake-like” motion
The research on shield attitude control by relevant scholars mainly focuses on the statistical analysis of measured data. The existing theoretical models are based on strict assumptions, with less consideration of the shield characteristics and low engineering applicability. In this paper, based on the actual project, through the simulation of Particle Flow Code distinct-element modeling (PFC-DEM) software, the influence of force on the shield during the change in the shield attitude is analyzed and discussed by introducing the factor of the overbreak cutter.
2 Project Overview
The total length of the Wuhan Metro Line 8 cross-river tunnel in Hubei Province is 3186 m where it crosses the Yangtze River, and the width is about 1500 m, as shown in Fig. 2. An air cushion shield with a diameter of 12.51 m passes through mainly siltstone, silt clay, silty fine sand, and coarse clay. The upper part of the tunnel is all silt-fine sand. Strongly weathered conglomerate (1365 m) and weakly weathered conglomerate (750 m) are distributed in the middle of the tunnel, and strongly cemented conglomerate is distributed at the bottom of the tunnel, as shown in Fig. 3. Silt-fine sand is the main soil layer that the shield tunnel traverses (see Fig. 4). The specific physical and mechanical parameters are shown in Table 1.

Location of the underwater tunnel of Wuhan Metro Line 8 crossing the Yangtze River

Strata profile

Strata of Wuhan Metro Line 8 cross-river tunnel
The shield–soil interaction is complex. In order to simplify the numerical model and highlight the simulation results, the interval between Ring. 210 and Ring. 250 with a relatively simple geological condition is selected to analyze the attitude control of shield tunneling. As shown in Fig. 3, the overburden load of this excavation section is about 0.3 MPa, and the thickness of the covering soil is about twice the diameter of the shield. According to the geological profile, the soil layer encountered in this excavation section can be approximately regarded as a uniform soil layer.
3 DEM Model and Parameter Calibration
3.1 Parameter Calibration
For simplification, the spherical particle was adopted to describe the strength properties and fluidity of the actual soil [21, 22]. In this study, to characterize the adhesion among the conditioned soil grains, the Hertz–Mindlin (H-M) with the Johnson–Kendall–Roberts (JKR) model was chosen for inter-particle contact behavior [23]. In the calibration, a series of DEM simulations of the laboratory triaxial tests were performed with assumed contact parameters (see Table 2). The contact parameters were continuously adjusted, and the results of the DEM simulations were compared with those of the laboratory triaxial tests. Finally, the contact parameters in Table 2 were obtained from a set of appropriate contact parameters. The related material properties and contact parameters for particles are listed in Table 2, which were carefully determined by comparing the numerically obtained and experimentally measured results of large-scale triaxial tests.
The layered undervoltage method proposed by Jiang et al. [24] is used to generate test samples in eight layers. By this method, the sample void ratio is uniform and does not cause excessive initial stress between particles. The numerical triaxial test model is shown in Fig. 5. The predicted and measured stress–strain curves (see Fig. 6a) are in good agreement with each other. Besides, the friction angle of the soil derived from the numerically obtained Mohr-Coulomb circles (see Fig. 6b) is consistent with the real value. From this perspective, the established particle model is competent to describe the actual soil behavior.

DEM synthetic sample for triaxial test

Calculated and measured triaxial test results: a stress–strain curves; b Mohr–Coulomb circles
3.2 Simulation Method of Overbreak Cutter
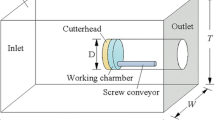
The overbreak cutter, which can also be called copying cutter, is set inside the cutterhead. The overbreak cutter can radially extend and retract from the inside of the shield machine to realize curve advancement and timely deviation correction. According to the requirements of the over-excavation amount and over-excavation range, the attitude adjustment of the shield machine is carried out using the overbreak cutter under the condition of little interference to the surrounding soil. The overbreak cutter is mainly aimed at the soil on both sides of the shield machine. However, at present, the axis of the tunnel tends to be more complicated, and the shield changes more so the cases of using the overbreak cutter on the upper and lower sides of the shield machine are gradually increasing. The specific operation of the overbreak cutter is shown in Fig. 7a, where δ is the elongation length of the overbreak cutter.

Overbreak cutter operation and simulation method: a operation; b simulation method
In PFC-DEM software, the construction process of the overbreak cutter is approximately simulated by gradually deleting the soil particles in the limited area, as shown in Fig. 7b. The height δ of the overbreak cutter is set to 100 mm, 150 mm, and 200 mm, respectively, and the corresponding over-excavation rates are 0.56%, 0.84%, and 1.12%. The over-excavation range is set according to the changing direction of the shield attitude, as shown in Fig. 7b.
3.3 Model Establishment and Simulation Process
The simulation model is shown in Fig. 8. The formation loss rate of subway shield construction in soft soil is generally 1–2% [25, 26], and the formation loss rate of the model in this paper is set to 1.8%. The shield can be regarded as a rigid body, so the model boundary and the shield machine can be simulated with wall elements in discrete element software. Using the particle microscopic parameters obtained from the biaxial test, the simulated shield diameter is 12 m (the engineering prototype is a shield tunnel with a diameter of 12.1 m), and the thickness of the covering soil is twice the shield diameter. The size of the numerical model is 90 m × 72 m, and a total of 85,866 soil particles are generated.

PFC numerical model
The shield can be regarded as composed of countless unit sections, and the movement of each section decreases or increases sequentially from the shield head to the tail, as shown in Fig. 9. Therefore, in this paper, a 3D model can be simplified into two-dimensional problem solving, and the three-dimensional shield tunneling can be analyzed with the stress state of several sections. The over-excavation part not only involves the cutting interface of the cutterhead, but extends to the rear of the shield shell. The cutting of the cutterhead only affects a small part of the range, so the influence of the overbreak cutter on soil cutting is not considered in the simulation process. In order to highlight the influence of the overbreak cutter and attitude changes in this study, the ground movement is cleared after tunnel generation.

Simulation of shield attitude change
After the formation and its initial stress are generated, the particles within the scope of the shield and the over-excavation parts are deleted. The shield attitude change is simulated by applying a certain direction of velocity to the wall. The velocity is 0.01 m/s, as shown in Fig. 10. In the first 1000 calculation steps, the moving speed of the shield shell is linearly increased to 0.01 m/s, and the moving speed remains unchanged in the subsequent calculation steps. In the process of simulation, the overburden load is achieved by setting a servo speed on the top wall. The contact of the shield shell is traversed in real time to record the interaction force between the shield shell and soil, including vertical force, horizontal force, and normal force.

Speed change curve of the shield
4 Numerical Results and Analysis
In order to facilitate analysis and discussion, the process of shield attitude adjustment can be divided into three stages. Stage I: The direction of the resultant force on the shield shell is the same as the direction of movement, and the resultant force shows a linear decreasing law. Stage II: With the slow movement of the shield, the over-excavation part is gradually compacted, and the resultant force on the shield shell in the same direction as the movement slowly decreases and gradually tends to a balanced state. Stage III: The over-excavation part disappears completely, the soil layer is gradually compacted, and the resultant force acting on the shield against the moving direction increases gradually. Three indicators are defined. D1 is the shield shell displacement when the over-excavation part starts to decrease, that is, the junction point of Stage I and Stage II. D2 is the displacement of the shield shell when the over-excavation part completely disappears and the shield shell reaches the force balance state, that is, the junction point of Stage II and Stage III. Figure 11 shows the specific interpretation of D1 and D2. ε is the over-excavation rate, which can be calculated according to Eq. (1).
where V2 is the simulated excavation soil volume, and V0 is the theoretical excavation volume.

Interpretation of D1 and D2 definitions
In this paper, the influence of the overbreak cutter on the force of the shield shell will be analyzed under the three influencing factors of over-excavation rate, over-excavation direction, and overburden load. An orthogonal test design was used to simulate the calculation cases, and three control groups (CA, CB, CC) were set up for comparative analysis, as shown in Table 3.
Based on the DEM model established above, the numerical calculation results of the shield shell force under the influence of multiple factors are shown in Fig. 12.

The speed change curve between the force on the shield shell and displacement: a C1; b C2; c C3; d C4; e C5; f C6; g C7; h C8
4.1 Over-Excavation Rate
In actual engineering, the over-excavation rate is often controlled by the elongation or cutting range of the overbreak cutter, and the direction and amount of over-excavation need to be set according to the shield attitude adjustment. Therefore, it is particularly necessary to study the influence of the over-excavation rate on the force of the shield shell and to analyze its internal relationship. C1, C2, and C3 are the corresponding simulation cases. The over-excavation rate is set to 0.56%, 0.84%, and 1.12%, respectively.
The simulation results of C1, C2, and C3 are shown in Fig. 12a–c. Firstly, when the shield moves in the +y direction, the resultant force on the shield in the x direction tends to 0, which is consistent with the characteristic that the simulation model is a symmetrical model. Under the same overburden load (0.5 MPa), the D1 of C1, C2, and C3 are 5.5 mm, 5.8 mm, and 6.0 mm, respectively. This shows that with the increase in the over-excavation rate, the allowable displacement of shield movement in Stage I increases slightly. The resultant force on the shield shell in the same direction as the movement decreases more slowly. Under the same overburden load (0.5 MPa), the D2 of C1, C2, and C3 are 13.0 mm, 19.8 mm, and 22.0 mm, respectively. D2 is the ultimate safe displacement of the shield when adjusting its attitude. When the moving distance of the shield is equal to D2, it indicates that the shield is in a force–balanced state, and the shield machine continues to move; the soil layer is gradually compacted, resulting in greater ground resistance, which easily makes the attitude adjustment cylinder in an overloaded state. If the shield continues to move, the soil layer will be gradually compacted, resulting in greater formation resistance, whe over-excavation rate can expand the adjustment range of the shield attitude. It can be seen from Fig. 12a–c that when D2 is exceeded, the growth trend of the resultant force in the y direction of the shield is almost thich will easily put the propulsion cylinder in an overloaded state. Similarly, with the increase in the over-excavation rate, the limit safety displacement D2 of the shield also increases. Therefore, an appropriate increase in the same. This indicates that the over-excavation part completely disappears, and the soil and the shield shell are in a state of complete contact.
Figure 13 shows the normal force distribution of the shield when the shield moves 5 mm in the +y direction. In three cases (C1, C2, C3), when the shield moves 5 mm in the y direction, the stress state of the shield is Stage I. Compared with the simulation results without over-excavation, it can be seen that the over-excavation part has an unloading effect on the shield, but as the shield moves, the over-excavation range will gradually decrease. As the over-excavation rate increases, the rate at which the over-excavation range decreases will gradually slow down.

Normal force distribution of shield when the shield moving distance in the +y direction is 5 mm
4.2 Over-Excavation Rate
The simulation cases for the over-excavation direction are C2, C4, C5, and C6, respectively. The over-excavation rate is set to 0.84%. The simulation results are shown in Fig. 12b, d–f. The results reveal that when the over-excavation rate is the same and moving toward the −y direction, the non-overbreak range of the lower part of the shield squeezes the soil greatly, so that the resultant force in the −y direction drops rapidly. When the displacement of the shield is −4 mm, the resultant force in the −y direction begins to increase slowly. This is because the shield shell has a certain blocking effect on the soil particles, so that the lower over-excavation area cannot be filled quickly. Comparing Fig. 12b, d, under the condition of the same over-excavation rate, it is more difficult to adjust the shield upward than downward. Regardless of whether the shield moves in the +y direction or the −y direction, the resultant force in the x direction tends to be zero.
As shown in Fig. 12e, f, when the shield moves toward the +x and −x directions, the two indicators D1 and D2 are very close, and the force on the shield shell is almost the same. It can be seen from Fig. 14 that the displacement contours of soil particles along the y-axis are symmetrical. Since ground displacements are cleared after tunnel generation, the distribution of surface settlement is not V-type, but W-type. When the properties of the soil layer have the characteristics of symmetrical distribution in the horizontal direction, the attitude adjustment of the shield in the horizontal direction has a symmetrical force-bearing form. When the shield moves toward the +x and −x directions, the resultant force on the shield shell in the y direction tends to decrease slowly. Figure 14 shows that the maximum displacement of soil particles occurs at the lower right and lower left of the shield, respectively, which indicates that the soil particles in these two parts are squeezed during the movement of the shield.

Displacement nephogram of soil particles in the y direction: a C5; b C6
4.3 Overburden Load
The adjustment of the shield attitude will be affected by the covering soil load. If the overburden soil load is too large, it will be extremely difficult to adjust the shield attitude, and excessive posture adjustment may cause excessive deformation of the soil layer. Excessive attitude adjustment may cause deformation of the soil layer and poor segment attitude [27, 28].
The simulation results for C2, C7, and C8 are shown in Fig. 12a. The over-excavation rate was set to 0.84% in the three cases. Values of 0.5 MPa, 1.0 MPa, and 1.5 MPa were applied, respectively, and the simulation calculation results are shown in Figs. 12b, e, f. As shown in Fig. 15, as the overburden load increases, the D2 gradually decreases. This indicates that under high loads, the space for attitude adjustment is much smaller. In order to further study the relationship between the covering soil load and the D2, four pressure levels of 0 MPa, 0.25 MPa, 0.75 MPa, and 1.25 MPa are added. The simulation results are shown in Table 4.

Fitting curve between the overburden load and D2
The quadratic function of one variable is used for fitting, and the fitting degree is better. The relational formula between the overburden load and the D2 is obtained as follows:
If x = 2.0 MPa, y = 5.2 mm can be calculated. It can be seen that under a high-pressure load of 2.0 MPa and under the premise of construction aided by overbreak cutters, the adjustable range of shield attitude is extremely limited.
5 Engineering Application
Based on the simulation method proposed in this paper, the engineering application is carried out for the vertical deviation of the shield attitude between Ring. 210 and Ring. 250. Figure 16 shows the projection view of the advance route and schematic of the front vertical deviation (FVD) and the tail vertical deviation (FVD). Figure 17 shows the shield head and tail attitude deviation in the vertical direction between Ring. 210 and Ring. 250. As shown in Fig. 17, the deviation difference between the shield head and tail is controlled between −43 and 34 mm. With the shield continuous tunneling, the difference decreases from a positive value. When the shield tunneling reaches Ring. 228, the difference between the shield head and tail basically disappears, but after Ring. 228, the deviation begins to increase in the negative direction. As shown in Fig. 17, through empirical operation, the shield attitude can be controlled, but since there is no standard for the threshold value of the deviation of the shield attitude, it is impossible to evaluate the quality of the attitude control more intuitively.

Shield vertical deviation

Shield attitude deviation in the vertical orientation between Ring. 210 and Ring. 250
The method proposed in this paper can be used to determine the limit value of the shield attitude. Using the simulation model in this paper, the overburden load is set to 0.3 MPa. The D2 in the vertical positive direction can be obtained under the two cases of no overbreak cutter and an over-excavation rate of 0.84%. From the above simulation results, it can be seen that the vertical upward adjustment of the shield is more difficult than the vertical downward adjustment, so its negative value can be used as the D2 in the vertical negative direction. In the case of not using the overbreak cutter, the D2 in the vertical positive direction is 10 mm. Bringing 0.3 MPa into Eq. (2), it can be obtained that D2 is 25 mm when the overbreak cutter is used. Figure 18 shows the attitude change of each ring in the vertical direction in the tunneling section between Ring. 210 and Ring. 250, and the vertical direction control of this excavation section is basically within the range of the limit value without using the overbreak cutter.

The amount of shield attitude change in the vertical orientation between Ring. 210 and Ring. 250
6 Conclusions
With PFC-DEM software, combined with actual engineering, the influence law of the overbreak cutter on the force and the shield attitude was studied. The shield shell mechanics were simulated under the influence of over-excavation rate, over-excavation orientations, and overburden load. The following main conclusions were drawn:
-
1.
In the case of the same overburden load, with a greater overbreak rate, the ultimate safety displacement D2 of the shield will increase, and an appropriate increase in the over-excavation rate can expand the adjustment range of the shield attitude. When the shield moves in the vertical direction, the resultant force on the shield in the horizontal direction is close to 0, and the force on the shield in the horizontal direction is balanced.
-
2.
In the case of the same over-excavation rate, with an increase in the overlying load, the ultimate safe displacement D2 of the shield gradually decreases. The overburden load and the index D2 are fitted by a quadratic function of one variable, and the fitting degree is good. According to the fitting formula, when the overburden load reaches 2.0 MPa, D2 is only 5.2 mm, indicating that under the high-pressure load of 2.0 MPa, the adjustable range of the shield attitude is extremely limited.
-
3.
Taking the cross-river tunnel of Wuhan Metro Line 8 as an example, the interval between Ring. 210 and Ring. 250 is selected to evaluate the attitude control of shield tunneling. In this excavation section, the deviation difference between the shield head and tail is controlled between −43 and 34 mm. Using the simulation method in this paper, it is judged that the vertical attitude of the excavation section is controlled within the range of the limit value without using the overbreak cutter. The overbreak cutter cannot be used in this section.
-
4.
The overbreak cutter can play an unloading role in the process of adjusting the shield attitude, but in practical engineering applications, during the deflection correction process of the shield, the adjustment of the shield attitude by the tunneling parameter control should be preferred. Therefore, it is recommended that the overbreak cutters be used for the adjustment of shield attitude under difficult conditions such as small curvature radius and high overburden load.
Through the simulation model, a good engineering application was achieved in the project discussed in this paper. It is worth noting that the DEM model needs to be transformed from a 2D to a 3D model, and more complex formation conditions should be considered. Further research is needed to verify this simulation model if it is to be applied in additional field cases.
References
Chen XS (2018) Research on combined construction technology for cross-metro tunnels in underground spaces. Engineering 4(1):103–111
Qian QH, Lin P (2016) Safety risk management of underground engineering in China: Progress, challenges and strategies. J Rock Mech Geotech 8:423–442
Geng Z, Jin DL, Yuan D (2023) Face stability analysis of cohesion-frictional soils considering the soil arch effect and the instability failure process. Comput Geotech 2023(153):105050
Sugimoto M, Sramoon A (2002) Theoretical model of shield behavior during excavation. I: Theory. J Geotech Geoenviron Eng 128(2):138–155
Wang LT, Yang X, Gong GF et al (2018) Pose and trajectory control of shield tunneling machine in complicated stratum. Autom Constr 93:192–199
Shen X, Yuan DJ, Jin DL (2019) Influence of shield attitude change on shield–soil interaction. Appl Sci 9(9):1812
Tang L, Kong XX, Ling XZ et al (2022) Deviation correction strategy for the earth pressure balance shield based on shield–soil interactions. Front Mech Eng 17(2):20
Yue M, Sun W, Hu P (2012) Dynamic coordinated control of attitude correction for the shield tunneling based on load observer. Autom Constr 24:24–29
Sugimoto M, Sramoon A, Konishi S et al (2007) Simulation of shield tunneling behavior along a curved alignment in a multilayered ground. J Geotech Geoenviron 133(6):684–694
Hu XT, Huang YA, Yin ZP et al (2012) Optimization-based model of tunneling-induced distributed loads acting on the shield periphery. Autom Constr 24:138–148
Sugimoto M, Chen J, Sramoon A (2019) Frame structure analysis model of tunnel lining using nonlinear ground reaction curve. Tunn Undergr Space Technol 94:103135
Broere W, Faassen TF, Arends G et al (2007) Modelling the boring of curves in (very) soft soils during microtunnelling. Tunn Undergr Space Technol 22(5–6):600–609
Festa D, Broere W, Bosch JW (2015) Kinematic behaviour of a tunnel boring machine in soft soil: theory and observations. Tunn Undergr Space Technol 49:208–217
Sramoon A, Sugimoto M, Kayukawa K (2002) Theoretical model of shield behavior during excavation. II: Application. J Geotech Geoenviron Eng 128(2):156–165
Xiao HH, Chen ZY, Cao RL et al (2022) Prediction of shield machine posture using the GRU algorithm with adaptive boosting: a case study of Chengdu Subway project. Transp Geotech 37:100837
Shen X, Yuan DJ, Cao LQ et al (2022) Experimental investigation of the failure of shield grease seals under the influence of environmental factors: a case study. Eng Fail Anal 133:105975
Yue M, Sun W, Wei J (2011) Sliding mode robust controller for automatic rectification of shield machine. J Cent South Univ 18(2):536–541
Deng HS, Fu HL, Yue S et al (2022) Ground loss model for analyzing shield tunneling-induced surface settlement along curve sections. Tunn Undergr Space Technol 119:104250
Zhu HZ, Wang DY, Shi B et al (2022) Performance monitoring of a curved shield tunnel during adjacent excavations using a fiber optic nervous sensing system. Tunn Undergr Space Technol 124:104483
Chen J, Li ZM (2017) Theoretical algorithm for over-excavated volume and articulation angle during shield tunneling along sharp curves. China J Highw Trans 30(18):66–73
Guo YD, Jin DL, Li XG et al (2023) Effect of cutting blind zones on the performance of the rectangular pipe jacking machine with multiple cutterheads: a DEM study. Tunn Undergr Space Technol 134:104984
Zhu H, Cheng P, Zhuang X, Li Y, Li P (2020) Assessment and structural improvement on the performance of soil chamber system of EPB shield assisted with DEM modeling. Tunn Undergr Space Technol 96:103092
Johnson KL, Kendall K, Roberts A (1971) Surface energy and the contact of elastic solids. Proc R Soc Lond A Math Phys Sci 324(1558):301–313
Jiang MJ, Konrad JM, Leroueil S (2003) An efficient technique for generating homogeneous specimens for DEM studies. Comput Geotech 30(7):579–597
Liang RZ, Xia TD, Hong Y et al (2016) Effects of above-crossing tunnelling on the existing shield tunnels. Tunn Undergr Space Technol 58:159–176
Wei S, Liang RZ, Mei GX et al (2022) Experimental investigation on the deformation characteristics of locking-steel-pipe (LSP) pile retaining structure during excavation in sand. Undergr Space 7:1098–1114
Li YT, Qiao SG, Zhang ZH, Yong LM (2017) The construction technology of Earth Pressure Balance shield in sand stratum section. In: Xie L (ed) The 6th international conference on applied mechanics and civil engineering (AMCE2016). CRC Press-Taylor & Francis Group, Boca Raton, pp 137–141
Mo HH, Chen JS (2008) Study on inner force and dislocation of segments caused by shield machine attitude. Tunn Undergr Space Technol 23:281–291
Acknowledgments
The authors gratefully acknowledge the financial support by the National Natural Science Foundation of China (Grant No. 52108377, 52090084, and 51938008) and the open fund project of Key Laboratory of Safe Construction and Intelligent Maintenance for Urban Shield Tunnels of Zhejiang Province (Grant No. ZUCC-UST-22-06).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Communicated by Liang Gao.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Shen, X., Yuan, D., Jin, D. et al. Shield Attitude Adjustment Induced by Slurry Pressure Balance (SPB) Shield Tunneling Considering the Effects of Overbreak Cutter: A Numerical Simulation by DEM and Engineering Application. Urban Rail Transit 9, 221–232 (2023). https://doi.org/10.1007/s40864-023-00189-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40864-023-00189-y