
Abstract
In recent years, the researches on parameter estimation of uncertain differential equations have developed significantly. However, when we deal with some nonparametric uncertain differential equations, the parameter estimation may not be used directly. To deal with these uncertain differential equations, it is important to consider the nonparametric estimation with the help of the observations. As an important branch of uncertain differential equation, autonomous uncertain differential equation may be properly applied to model some uncertain autonomous dynamic systems. In this paper, we propose a Legendre polynomial based method for the nonparametric estimation of autonomous uncertain differential equations. After that, some numerical examples are given and the residuals as well as uncertain hypothesis tests are used to prove the acceptability of these estimations. In application, we consider an atmospheric carbon dioxide model by the proposed method of nonparametric estimation.
Similar content being viewed by others


1 Introduction
Since uncertainty theory was founded by Liu (2007) and perfected by Liu (2009), it has been widely applied into many fields, such as physics, engineering and finance. As an important part of uncertainty theory, uncertain differential equation driven by Liu process was introduced by Liu (2008). After that, uncertain differential equation quickly became a good tool to describe uncertain dynamic systems.
With a lot of good properties, uncertain differential equations attracted the attentions of many researchers. In 2010, a sufficient condition for the existence and uniqueness of the solution of an uncertain differential equation was proposed by Chen and Liu (2010). After that, a crucial Yao-Chen formula was proposed by Yao and Chen (2013) to connect uncertain differential equations with ordinary differential equations. Since the analytic solutions of uncertain differential equations may usually be unavailable, based on Yao-Chen formula, many numerical methods for uncertain differential equations were proposed, such as Euler method (Yao, 2013) and Runge–Kutta method (Yang and Shen, 2015). Uncertain differential equations had been widely applied to many fields, such as financial markets (Liu, 2009) and optimal control (Zhu, 2010, 2019).
As mentioned above, uncertain differential equations may properly describe uncertain dynamic systems. In applications, we usually construct a model based on uncertain differential equation to fit the corresponding uncertain dynamic system. Thus, it is crucial to work on the parameter estimation of uncertain differential equations. On that purpose, moment estimation (Yao and Liu, 2020), least squares estimation (Sheng et al., 2020), generalized moment estimation (Liu, 2021), maximum likelihood estimation (Liu and Liu, 2022a) and the method of moments with the help of residuals (Liu and Liu, 2022b) were proposed. In 2022, Ye and Liu (2022a) proposed the concept of uncertain hypothesis test and then applied it to uncertain differential equations (Ye and Liu 2022b). In recent years, parameter estimation in uncertain differential equations made a contribution to the epidemic model of COVID-19 (Chen et al., 2021; Jia and Chen, 2021; Lio and Liu, 2021). Moreover, for the sake of coping with uncertain dynamic systems with memory characteristic, Zhu (2015) gave the definition of uncertain fractional differential equation. Then, He et al. (2022) introduced an algorithm of parameter estimation for uncertain fractional differential equations based on method of moments.
Actually, many uncertain dynamic systems in our lives are autonomous, whose states at the next time are only related to the previous states. To cope with this kind of autonomous uncertain dynamic systems, we propose the definition of autonomous uncertain differential equation. For some cases, the information of an autonomous uncertain dynamic system is not enough to construct a parametric model. In this situation, only a nonparametric model is available. To solve the problem of nonparametric estimation, we need to obtain a parametric model as the approximation of the nonparametric model. Legendre polynomials have many outstanding properties such as orthogonality, symmetry and recursiveness. In 2020, Gu et al. (2020) proposed a Legendre polynomials based numerical method for the solutions of optimal control problems, which suggested that the Legendre polynomials have good property of arbitrary approximation for continuous functions. Thus, we may utilize the Legendre polynomials sequence to approximate the nonparametric functions in uncertain differential equations. In this paper, we discuss the method of nonparametric estimation for autonomous uncertain differential equations.
The rest of this paper is organized as follows. In Sect. 2, we introduce some definitions and properties of Legendre polynomials, uncertainty differential equations and uncertain hypothesis tests. Then, a method of nonparametric estimation for uncertain differential equations is proposed in Sect. 3. In Sect. 4, we give three numerical examples to show the effectiveness of our method. Finally in Sect. 5, we apply the nonparametric estimation into the atmospheric carbon dioxide model.
2 Preliminaries
Let \(C_t\) be a Liu process. Suppose that \(f,g:[0,+\infty )\times \mathbb {R}\rightarrow \mathbb {R}\) are two functions. Uncertain differential equation
may be used to describe uncertain dynamic systems. If functions f and g are parametric forms, then there are many researches for the estimations of unknown parameters. However, in some cases, we may only construct the nonparametric models. To cope with these models, we consider to utilize an orthogonal function sequence with unknown weights to approximate the nonparametric functions f and g in (1). Then, the method of parameter estimation may be used to estimate the weights.
In this paper, with many outstanding properties, the Legendre polynomials are used for the approximation of nonparametric function. For \(x\in \mathbb {R}\), the Legendre polynomials \(p_n(x)\) are the polynomial solutions to Legendre’s differential equation
Thus, Legendre polynomials are given in the following form
Based on Eq. (2), we have
The following three properties of Legendre polynomials are useful.
Property 1
[Orthogonality (Kashin and Saakian, 1984)] Legendre polynomials are orthogonal polynomials with respect to the \(L^2\) on the interval \([-1,1]\), i.e.,
where \(\delta _{mn}\) denotes the Kronecker symbol
Property 2
[Symmetric and antisymmetric (Kashin and Saakian, 1984)] Each Legendre polynomial is symmetric or antisymmetric on the interval \([-1,1]\), i.e.,
Property 3
[Recursiveness (Kashin and Saakian, 1984)] On the interval \([-1,1]\), the Legendre polynomials follow the three-term recurrence relation, which is known as Bonnets recursion formula
and
A continuous function \(\varphi (x)\) \((x\in [-1,1])\) may be expressed in terms of Legendre series as
where \(c_i\in \mathbb {R}\) for \(i=0,1,2,\ldots \) In calculation, \(\varphi (x)\) is approximated by the partial sum of Legendre series. Then, we have
where \(c_i\in \mathbb {R}\) for \(i=0,1,2,\ldots ,K\) and K is an appropriate positive integer.
For some uncertain dynamic systems, the variations of the current states are only directly affected by the states of themselves, such as the stock price and the atmospheric greenhouse gas. The uncertain dynamic systems with this phenomenon are called autonomous uncertain dynamic systems. To cope with this kind of systems, we give the definition of autonomous uncertain differential equation.
Definition 1
Let \(C_t\) be a Liu process. Suppose that \(f,g:\mathbb {R}\rightarrow \mathbb {R}\) are two functions. Then
is called an autonomous uncertain differential equation. A solution of (4) is an uncertain process \(X_t\) such that
holds almost surely.
With the help of the Legendre polynomials, we may obtain an approximation of the autonomous uncertain differential Eq. (4) with weights. Then, the unknown weights in the approximation may be estimated by the method of parameter estimation. Ye and Liu (2022b) discussed uncertain hypothesis test for uncertain differential equations, which proposed a standard to test whether the estimated parameters are acceptable.
Theorem 1
(Ye and Liu, 2022b) Let \(\xi \) be a population with regular uncertainty distribution \(\mathcal {L}(a,b)\) with unknown parameters a and b. Then the test for the hypotheses
at significance level \(\beta \) is
where \(\Phi ^{-1}_0(\beta )\) is the inverse uncertainty distribution of \(\mathcal {L}(a_0,b_0)\), i.e.,
Remark 1
For uncertain differential Eq. (1) with observations \(x_{t_1},x_{t_2},\ldots ,x_{t_n}\) of \(X_t\) at \(t_1,t_2,\ldots ,t_n\), respectively, residuals of the estimation of (1) should be obtained as \(\varepsilon _2,\varepsilon _3,\ldots ,\varepsilon _n\) with the help of Liu and Liu (2022b). According to Liu and Liu (2022b), the residual \(\varepsilon _i\) may be regraded as a sample of the linear uncertainty distribution \(\mathcal {L}(0,1)\) if estimated uncertain differential equation is appropriate.
Based on the conception of uncertain hypothesis test for uncertain differential equations proposed by Ye and Liu (2022b), to test whether the estimation may properly fit the observations \(x_{t_1}\), \(x_{t_2}\), \(\ldots \), \(x_{t_n}\), the test at a given significance level \(\beta =0.05\) is
and the reject set is
If the vector of the \(n-1\) residuals belongs to the test W, i.e.,
then the estimation of uncertain differential Eq. (1) is not a good fit to the observed data \(x_{t_1},x_{t_2},\ldots ,x_{t_n}\). If
then the estimation of uncertain differential Eq. (1) is an applicable fit to the observed data \(x_{t_1},x_{t_2},\ldots ,x_{t_n}\).
3 Nonparametric estimation
Consider an autonomous uncertain differential equation in the following form
where \(f: \mathbb {R}\rightarrow \mathbb {R}\) is an unknown continuous function, \(g: \mathbb {R}\rightarrow \mathbb {R}\) is a known continuous function and \(\sigma \) is an unknown parameter. Let \(0<t_1<t_2<\dots <t_n=T\). Assume that there are n observations \(x_{t_1}, x_{t_2},\ldots ,x_{t_n}\) of solution \(X_t\) at the times \(t_1,t_2,\ldots ,t_n\), respectively.
According to Eq. (3), for a fixed \(K\in \mathbb {N}\), we have
where \(c_i\in \mathbb {R}\) for \(i=0,1,2,\ldots ,K\). According to (6), the approximation of model (5) may be obtained in the following form
As suggested by Yao and Liu (2020), for \(j=1,2,\ldots ,n-1\), we have
i.e.,
According to the definition of Liu process \(C_t\),
are independent identically distributed. Thus, we denote that
is the noise. Denote that \({\varvec{c}}_K=(c_0,c_1,\ldots ,c_K)\). We consider the following uncertain linear regression model
where \({\varvec{\eta }}=\left( \eta _0,\eta _1,\ldots ,\eta _K \right) \) is a vector of explanatory variables and y is a response variable. According to Eq. (8), we may assume that the observations of \({\varvec{\eta }}\) and y are
and
respectively. Apparently, the regression model (9) is equivalent to Eq. (8). Suppose that \(\tilde{\varvec{c}}_K=\left( c_{0}^*,c_{1}^*,c_{2}^*,\ldots ,c_{K}^* \right) \) is the estimation of \({\varvec{c}}_K\) and \(\sigma ^*\) is the estimation of \(\sigma \). Based on the method of uncertain maximum likelihood estimation proposed by Lio and Liu (2020), \(\tilde{\varvec{c}}_K\) solves the minimization problem
and \(\sigma ^*\) solves the maximization problem
According to Liu and Liu (2022a), we have
where \(\lambda \) is the root of equation
and may be taken as 1.5434 approximately in numerical solution.
It is important to first find an appropriate estimation of K (denoted as \(K^*\)). Based on the property of Legendre polynomial approximation, the right side of (6) would converge to the left side of (6) with \(K\rightarrow +\infty \), i.e., for \(j=1,2,\ldots ,n-1\), we have
Since
and
based on the Squeeze theorem, we have
Thus, we have
According to the objective function of optimization problem (12), we denote that
In order to avoid too much computation, we suppose that \(\Delta \) is the acceptable error and the smallest K that satisfies
is the value of \(K^*\). Then the value of \(\tilde{\varvec{c}}_{K^*}\) may be obtained. Now we give the Algorithm 1 to calculate the values of \(\tilde{\varvec{c}}_{K^*}\) and \(K^*\).

Remark 2
For uncertain differential Eq. (5), if \(g: \mathbb {R}\rightarrow \mathbb {R}\) is also an unknown continuous function, with the help of Legendre polynomials, similar to (7), we have the approximation of (5) in the following form
where \(c_0,c_1,\ldots ,c_{K_1},d_0,d_1,\ldots ,d_{K_2}\in \mathbb {R}\). Then we have
Based on the method of maximum likelihood estimation, the estimations of \(c_0\), \(c_1\), \(\ldots \), \(c_{K_1}\), \(d_0\), \(d_1\), \(\ldots \), \(d_{K_2}\) are the solutions of the following optimization problem
Apparently, the absolute values of \(d_0,d_1,\ldots ,d_{K_2}\) in the solutions of optimization problem (16) will be very large. Since the aim of nonparametric estimation is to find a properly estimated uncertain differential Eq. (14) as the estimation of uncertain differential Eq. (5), estimations of \(d_0,d_1,\ldots ,d_{K_2}\) with large absolute values will give the solution of (14) a strong disturbance, which is obviously unsatisfactory.
In fact, we may easily obtain the estimation of f in a uncertain differential Eq. (5), which is the most important thing in nonparametric estimation if g is already known. Thus, in application, we tend to define g in a known and acceptable form for observations. Then Algorithm 1 may be employed for the estimation of this uncertain differential equation.
4 Numerical experiments
Example 1
Consider uncertain differential equation
with some observations of \(X_t\) which are shown in Table 1.
Utilizing (6), we have the approximation of uncertain differential Eq. (17) in the following form
With the help of Algorithm 1 (where \(\Delta = 10^{-4}\)), we have \(K^*=2\) and
Thus the estimated uncertain differential equation of (17) is
According to Liu and Liu (2022b), the residuals of uncertain differential Eq. (18) may be obtained and given in Table 2. If uncertain differential Eq. (18) does fit the observed data in Table 1 well, then the residuals in Table 2 should follow the linear uncertainty distribution \(\mathcal {L}(0,1)\), i.e.,
Apparently, all the residuals are included in [0.025, 0.975], we have
It follows from Remark 1 that the uncertain differential Eq. (18) is an applicable fit to the observed data in Table 1.
Example 2
Consider uncertain differential equation
with some observations of \(X_t\) which are shown in Table 3.
Similarly to Example 1, we have the estimation of uncertain differential Eq. (19) in the following form
The residuals of uncertain differential Eq. (20) may be obtained and given in Table 4. Since all the residuals are included in [0.025, 0.975], it follows from Remark 1 that the uncertain differential Eq. (20) is an applicable fit to the observed data in Table 3.
Example 3
Consider the uncertain differential equation with initial value
Let us give the function f(x) by
and the true value of \(\sigma \) by \(\sigma =1\). Then the corresponding \(\alpha \)-path \(X_t^{\alpha }\) of (21) satisfies
Note that the inverse uncertainty distribution of solution \(X_t\) to (21) is solution \(X_t^\alpha \) to (22). That is, for \(\alpha \in (0,1)\), \(X_t^\alpha \) is a sample point of \(X_t\) at time t. Observed data in Table 5 are produced by solving (22) for arbitrary \(\alpha \in (0,1)\) at time \(t_i\).
Based on the observed data, similarly to Example 1, we have the estimation of uncertain differential Eq. (21) in the following form
The residuals of uncertain differential Eq. (23) may be obtained and given in Table 6. Since all the residuals are included in [0.025, 0.975], it follows from Remark 1 that the uncertain differential Eq. (23) is an applicable fit to the observed data in Table 5.
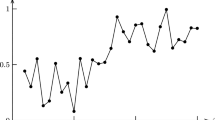
As may be seen in (23), the estimated function of f(x) is
Since all the observations of \(X_t\) are located in interval [0, 0.8], in Fig. 1, we give the image of true function f(x) and its estimation \(f^*(x)\) in \(x\in [0,0.8]\). Obviously, \(f^*(x)\) may properly approximate f(x).

Image of true function f(x) and the estimation \(f^*(x)\)
All these three numerical examples suggest that the estimated uncertain differential equations may fit the corresponding observations well.
5 Application to atmospheric carbon dioxide problem
In this section, we apply the method of nonparametric estimation into the modeling of the atmospheric carbon dioxide problem. The data of monthly mean atmospheric carbon dioxide measured at Mauna Loa Observatory (Hawaii) from February 2018 to September 2022 are shown in Table 7. (All the data may be found at https://www.co2.earth/. The unit of these data is parts per million)
5.1 Modeling of atmospheric carbon dioxide problem
Denote that the observed times are \(t_1=0.1,t_2=0.2,\ldots ,t_{56}=5.6\). Assume that \({\varvec{z}}\) is the vector consisting of all values in Table 7. Since the Legendre polynomials may only approximate the continuous functions in domain \([-1,1]\), we multiply all values by \(\frac{0.8}{\max {\varvec{z}}}\), i.e., 0.0019. Then the processed data are denoted as the observed data \(x_{t_1},x_{t_2},\ldots ,x_{t_{56}}\) at times \(t_1,t_2,\ldots ,t_{56}\) and given in Table 8.
Now we construct the following atmospheric carbon dioxide model based on the processed data in Table 8.
where \(f: \mathbb {R}\rightarrow \mathbb {R}\) is an unknown continuous function and \(\sigma >0\) is an unknown parameter. Approximating the uncertain differential Eq. (24) by the following form
Then, Algorithm 1 may be used to obtain \(K^*=2\) and
Thus the estimated uncertain differential equation of (24) is
The residuals of the uncertain differential Eq. (25) may be obtained and given in Table 9. Since all the residuals are included in [0.025, 0.975], the uncertain differential Eq. (25) is an applicable fit to the observed data in Table 8. Therefore, we say that the dynamic process of atmospheric carbon dioxide measured at Mauna Loa Observatory from February 2018 to September 2022 follows the uncertain differential Eq. (25).
5.2 Completion of lost data
Due to the unexpected accidents, some data may be lost in management or storage. Let us take this atmospheric carbon dioxide problem for example. Referring to Table 7, we assume that the data in March 2018, June 2019 are lost. That is, the proceed data at \(j=2\) and \(j=17\) in Table 8 are lost. For the parametric form
similarly to Sect. 5.1, the estimated values may be obtained as \(K^*=2\) and
Then the estimation of model (24) is
The residuals of uncertain differential Eq. (26) may be obtained and given in Table 10. Since all the residuals are included in [0.025, 0.975], uncertain differential Eq. (26) is an applicable fit to the existing observed data in Table 8.
According to the definitions of forecast value and confidence interval given by Lio and Liu (2018), we may obtain the forecast value of y in uncertain regression model (9) as
and \(\gamma \)-confidence interval (e.g., \(\gamma =0.95\)) of y as
For a fixed j, we suppose that the observed value of \(X_{t_{j+1}}\) is missing. Thus, we denote the forecast value of \(X_{t_{j+1}}\) as \(\hat{X}_{t_{j+1}}\). According to (10) and (11), we may obtain the j-th observations of \({\varvec{\eta }}\) as
and the j-th observations of y as
Substituting \({\varvec{\eta }}={\varvec{\eta }}_j\) and \(\hat{y}=y_j\) into (27), we have the forecast value of \(X_{t_{j+1}}\) as
Substituting \({\varvec{\eta }}={\varvec{\eta }}_j\) and \(\hat{y}=y_j\) into (28), we have the \(\gamma \)-confidence interval of \(X_{t_{j+1}}\) as
With (29), we have the forecast values of \(X_{t_2}\) and \(X_{t_{17}}\) as \(\hat{X}_{t_2}=0.7763\) and \(\hat{X}_{t_{17}}=0.7878\), respectively. Then with (30), we have the \(95\%\)-confidence interval of \(X_{t_2}\) and \(X_{t_{17}}\) as [0.7673, 0.7853] and [0.7786, 0.7970], respectively.
Restoring the processed data to the original data, we have the forecast value of the lost data in March 2018 as 408.52 with \(95\%\)-confidence interval [403.77, 413.27] and the forecast value of the lost data in June 2019 as 414.57 with \(95\%\)-confidence interval [409.74, 419.39]. Referring to Table 7, we may clearly see that the actual value in March 2018 is 409.59 which is in the interval [403.77, 413.27] and the actual value in June 2019 is 414.16 which is in the interval [409.74, 419.39]. Thus we claim that model (26) may complete the lost data well.
In general, the estimated model obtained by nonparametric estimation may properly fit the observations and complete the lost data. Thus we claim that our method of nonparametric estimation is effective for this atmospheric carbon dioxide model.
6 Conclusion
In this paper, we proposed a method of nonparametric estimation for autonomous uncertain differential equations. An algorithm was introduced and illustrated with three numerical examples. With the help of residuals and uncertain hypothesis test, we proved that the estimated uncertain differential equations may fit their observations well. Finally, we applied the nonparametric estimation into the atmospheric carbon dioxide problem. With the data of monthly mean atmospheric carbon dioxide from February 2018 to September 2022, we obtained an uncertain differential equation based model by using the method of nonparametric estimation. Then, the model was proved to be an applicable fit to the observations and an effective tool to complete the lost data. In the future, we will further research on the method of nonparametric estimation for nonautonomous uncertain differential equations whose variations of the current states are directly affected by both the states and the time.
References
Chen, X., & Liu, B. (2010). Existence and uniqueness theorem for uncertain differential equations. Fuzzy Optimization and Decision Making, 9, 69–81. https://doi.org/10.1007/s10700-010-9073-2
Chen, X., Li, J., Xiao, C., & Yang, P. (2021). Numerical solution and parameter estimation for uncertain SIR model with application to COVID-19. Fuzzy Optimization and Decision Making, 20, 189–208. https://doi.org/10.1007/s10700-020-09342-9
Gu, Y., Yan, H., & Zhu, Y. (2020). A numerical method for solving optimal control problems via Legendre polynomials. Engineering Computations, 37(8), 2735–2759. https://doi.org/10.1108/EC-07-2019-0326
He, L., Zhu, Y., & Lu, Z. (2022). Parameter estimation for uncertain fractional differential equations. Fuzzy Optimization and Decision Making, 22, 103–122. https://doi.org/10.1007/s10700-022-09385-0
Jia, L., & Chen, W. (2021). Uncertain SEIAR model for COVID-19 cases in China. Fuzzy Optimization and Decision Making, 20, 243–259. https://doi.org/10.1007/s10700-020-09341-w
Kashin, B. S., & Saakian, A. A. (1984). Orthogonal series. Nauka.
Lio, W., & Liu, B. (2018). Residual and confidence interval for uncertain regression model with imprecise observations. Journal of Intelligent & Fuzzy Systems, 35(2), 2573–2583. https://doi.org/10.3233/JIFS-18353
Lio, W., & Liu, B. (2020). Uncertain maximum likelihood estimation with application to uncertain regression analysis. Soft Computing, 24, 9351–9360. https://doi.org/10.1007/s00500-020-04951-3
Lio, W., & Liu, B. (2021). Initial value estimation of uncertain differential equations and zero-day of COVID-19 spread in China. Fuzzy Optimization and Decision Making, 20, 177–188. https://doi.org/10.1007/s10700-020-09337-6
Liu, B. (2007). Uncertainty theory (2nd ed.). Springer.
Liu, B. (2008). Fuzzy process, hybrid process and uncertain process. Journal of Uncertain Systems, 2(1), 3–16.
Liu, B. (2009). Some research problems in uncertainty theory. Journal of Uncertain Systems, 3(1), 3–10.
Liu, Y., & Liu, B. (2022). Estimating unknown parameters in uncertain differential equation by maximum likelihood estimation. Soft Computing, 26, 2773–2780. https://doi.org/10.1007/s00500-022-06766-w
Liu, Y., & Liu, B. (2022). Residual analysis and parameter estimation of uncertain differential equations. Fuzzy Optimization and Decision Making, 21, 513–530. https://doi.org/10.1007/s10700-021-09379-4
Liu, Z. (2021). Generalized moment estimation for uncertain differential equations. Applied Mathematics and Computation. https://doi.org/10.1016/j.amc.2020.125724
Yang, X., & Shen, Y. (2015). Runge-Kutta method for solving uncertain differential equations. Journal of Uncertainty Analysis and Applications, 3(10), 17.
Sheng, Y., Yao, K., & Chen, X. (2020). Least squares estimation in uncertain differential equations. IEEE Transactions on Fuzzy Systems, 28(10), 2651–2655. https://doi.org/10.1109/TFUZZ.2019.2939984
Yao, K. (2013). Extreme values and integral of solution of uncertain differential equation. Journal of Uncertainty Analysis and Applications, 1, 1–21.
Yao, K., & Chen, X. (2013). A numerical method for solving uncertain differential equations. Journal of Intelligent and Fuzzy Systems, 25(3), 825–832. https://doi.org/10.3233/IFS-120688
Yao, K., & Liu, B. (2020). Parameter estimation in uncertain differential equations. Fuzzy Optimization and Decision Making, 19, 1–12. https://doi.org/10.1007/s10700-019-09310-y
Ye, T., & Liu, B. (2022). Uncertain hypothesis test with application to uncertain regression analysis. Fuzzy Optimization and Decision Making, 21, 157–174. https://doi.org/10.1007/s10700-021-09365-w
Ye, T., & Liu, B. (2022). Uncertain hypothesis test for uncertain differential equations. Fuzzy Optimization and Decision Making, Early Access. https://doi.org/10.1007/s10700-022-09389-w
Zhu, Y. (2010). Uncertain optimal control with application to a portfolio selection model. Cybernetics and Systems, 41(7), 535–547. https://doi.org/10.1080/01969722.2010.511552
Zhu, Y. (2015). Uncertain fractional differential equations and an interest rate model. Mathematical Methods in the Applied Sciences, 38(15), 3359–3368. https://doi.org/10.1002/mma.3335
Zhu, Y. (2019). Uncertain optimal control. Springer.
Acknowledgements
This work is supported by the Postgraduate Research & Practice Innovation Program of Jiangsu Province (No. KYCX22_0395).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
He, L., Zhu, Y. & Gu, Y. Nonparametric estimation for uncertain differential equations. Fuzzy Optim Decis Making 22, 697–715 (2023). https://doi.org/10.1007/s10700-023-09408-4
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10700-023-09408-4