
Abstract
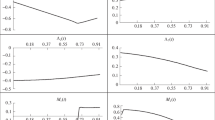
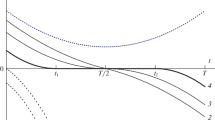
The problem of the optimal program control of the angular motion of a spacecraft (SC) as a rigid body with a quadratic functional of the energy spent on the maneuver of the SC and a fixed time of the transition process is investigated. The dynamic configuration of the SC and the boundary conditions are arbitrary and the control vector function is not limited. In the Poinsot concept, using the Pontryagin maximum principle, a quasi-optimal analytical solution of the problem is obtained, which is developed into an algorithm. Confirming numerical examples are given, showing the proximity of the quasi-optimal solution to the optimal solution of the problem.
Similar content being viewed by others

REFERENCES
S. L. Scrivener and R. C. Thompson, “Survey of time-optimal attitude maneuvers,” J. Guid. Control Dyn. 17 (2) (1994).
V. N. Branets and I. P. Shmyglevskii, Application of Quaternions in Problems of Rigid Body Orientation (Nauka, Moscow, 1973) [in Russian].
J. L. Junkins and J. D. Turner, Optimal Spacecraft Rotational Maneuvers (Elsevier, New York, 1986).
J. L. Crassidis and F. L. Markley, Fundamentals of Spacecraft Attitude Determination and Control (Springer, New York, 2014).
M. V. Levskii, “Restricted quadratic optimal control of a spacecraft turning in a fixed time period,” J. Comput. Syst. Sci. Int. 58 (1), 126–146 (2019).
M. V. Levskii, “Synthesis of the optimal control of the spacecraft orientation using combined criteria of quality,” J. Comput. Syst. Sci. Int. 58 (6), 980–1003 (2019).
Ya. G. Sapunkov and A. V. Molodenkov, “Numerical solution of the problem of optimal reorientation of a rotating space vehicle,” Mekhatron. Avtom. Upr., No. 6 (2008).
A. V. Molodenkov and Ya. G. Sapunkov, “Analytical quasi-optimal solution of the problem of the time-optimal rotation of a spacecraft,” J. Comput. Sci. Int. 60 (4), 639–653 (2021).
Ya. G. Sapunkov and A. V. Molodenkov, “Analytical solution of the problem on an axisymmetric spacecraft attitude maneuver optimal with respect to a combined functional,” Autom. Remote Control 82 (7), 1183–1200 (2021).
L. D. Akulenko and L. K. Lilov, “Synthesis of a quasi-optimal system of spacecraft reorientation and stabilization,” Kosm. Issled. 28 (2) (1990).
G. A. Boyarko, M. Romano, and O. A. Yakimenko, “Time-optimal reorientation of a spacecraft using an inverse dynamics optimization method,” J. Guid. Control Dyn. 34 (4) (2011).
L. S. Pontryagin, V. G. Boltyanskii, R. V. Gamkrelidze, and E. F. Mishchenko, Mathematical Theory of Optimal Processes (Nauka, Moscow, 1961) [in Russian].
G. J. Lastman, “A shooting method for solving two-point boundary-value problems arising from non-singular bang-bang optimal control problems,” Int. J. Contr. 27 (4), 513–524 (2007).
Yu. R. Banit, M. Yu. Belyaev, T. A. Dobrinskaya, N. I. Efimov, V. V. Sazonov, and V. M. Stazhkov, Preprint No. 57 (Keldysh Inst. of Applied Mathematics, Russian Academy of Sciences, 2002).
A. V. Molodenkov, “On the solution of the Darboux problem,” Mech. Solids 42 (2), 167–176 (2007).
A. V. Molodenkov and Ya. G. Sapunkov, “Analytical solution of the optimal slew problem of a spherically symmetric spacecraft in the class of conical motion,” J. Comput. Sci. Int. 52 (3), 491–501 (2013).
A. V. Molodenkov and S. E. Perelyaev, “Solution of approximate equation for modified Rodrigues vector and attitude algorithm design,” J. Guid. Control Dyn. 44 (6) (2021).
Funding
This work was financially supported by the Russian Science Foundation (project no. 22-21-00218) as part of topic FFNM-2022-0007.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note.
Pleiades Publishing remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Molodenkov, A.V., Sapunkov, I.G. Analytical Quasi-Optimal Algorithm for the Programmed Control of the Angular Motion of a Spacecraft. J. Comput. Syst. Sci. Int. 62, 569–580 (2023). https://doi.org/10.1134/S1064230723030103
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1064230723030103