
Abstract
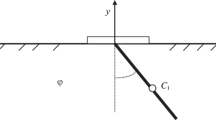
We consider the problem of the time-optimal turning of a system with two degrees of freedom in the form of a material point on a spring oscillating along a rigid weightless rod that rotates in a horizontal plane. The external control moment is applied to the axis of rotation of the rod and is limited in absolute value; and there is no friction. The problem of the fastest turning of the rod through the given angle from a state of rest with oscillation damping is solved. A feature of a nonlinear system is that its linearized model (in the vicinity of the state of rest) is not controllable.










Similar content being viewed by others


REFERENCES
L. D. Akulenko, N. N. Bolotnik, A. E. Borisov, A. A. Gavrikov, and G. A. Emel’yanov, “Quasi-optimal control of rotation of a rigid body about a fixed axis taking friction into account,” J. Comput. Syst. Sci. Int. 54 (3), 331–348 (2015).
I. M. Anan’evskii and T. A. Ishkhanyan, “Control of a turntable on a mobile base in the presence of perturbations,” J. Comput. Syst. Sci. Int. 55 (3), 483–491 (2016).
L. S. Pontryagin, V. G. Boltyanskii, R. V. Gamkrelidze, and E. F. Mishchenko, Mathematical Theory of Optimal Processes (Nauka, Moscow, 1969) [in Russian].
H. P. Geering, L. Guzella, S. A. R. Hepner, and C. H. Onder, “Time-optimal motions of robots in assembly tasks,” IEEE Trans. Autom. Control 31 (6), 512–518 (1986).
S. N. Osipov and A. M. Formal’skii, “The problem of the time-optimal turning of a manipulator,” J. Appl. Math. Mech. 52 (6), 725–731 (1988).
O. R. Kayumov, “Time-optimal movement of a trolley with a pendulum,” J. Comput. Syst. Sci. Int. 60 (1), 28–38 (2021).
I. F. Boretskii and O. R. Kayumov, “Globally controllable systems of rigid bodies,” J. Appl. Math. Mech. 62 (3), 371–377 (1998).
R. E. Kalman, “On the general theory of control systems,” in Proceedings of the First Congress of the International Federation of Automatic Control (Moscow, 1961), pp. 521–546 [in Russian].
E. A. Barbashin, Lyapunov Functions (Nauka, Moscow, 1970) [in Russian].
R. F. Gabasov and F. M. Kirillova, Special Optimal Controls (Nauka, Moscow, 1973) [in Russian].
O. R. Kayumov, “Diagrams of optimal control functions in the problem of the fastest platform movement with two oscillators,” J. Comput. Syst. Sci. Int. 61 (6), 776–792 (2022).
E. B. Lee and L. Markus, Foundations of Optimal Control Theory (Wiley, New York, 1967; Nauka, Moscow, 1972).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The author declares that he has no conflicts of interest.
Additional information
Publisher’s Note.
Pleiades Publishing remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kayumov, O.R. Time-Optimal Turning of a Spring Pendulum. J. Comput. Syst. Sci. Int. 62, 652–665 (2023). https://doi.org/10.1134/S1064230723040081
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1064230723040081