
Abstract
This paper uses tools on the structure of the Nash equilibrium correspondence of strategic-form games to characterize a class of fixed-point correspondences, that is, correspondences assigning, for a given parametrized function, the fixed-points associated with each value of the parameter. After generalizing recent results from the game-theoretic literature, we deduce that every fixed-point correspondence associated with a semi-algebraic function is the projection of a Nash equilibrium correspondence, and hence its graph is a slice of a projection, as well as a projection of a slice, of a manifold that is homeomorphic, even isotopic, to a Euclidean space. As a result, we derive an illustrative proof of Browder’s theorem for fixed-point correspondences.
Similar content being viewed by others

1 Introduction
The seminal paper of Nash [24], which showed that every finite strategic-form game possesses an equilibrium in mixed (randomized) strategies, revealed much more than it was saying: it showed that the Nash equilibrium correspondence, assigning to each game its equilibria, is a particular type of fixed-point correspondence: that is, a case of a map from a space (the mixed-strategy profiles) to itself, which depends on a parameter (the game’s payoffs), inducing a correspondence which assigns to each value of the parameter the associated fixed points (the equilibria). The following decades would yield a symbiotic relationship between fixed-point theory and game theory, and economic theory more generally: fixed-point theorems yield equilibria and other solution concepts, and the search for more general equilibrium existence brought forth new fixed-point theorems; for a partial survey, see Border [6].
Additionally, since Nash equilibria are naturally defined using algebraic equalities and inequalities (sets defined in this way are semi-algebraic), techniques from real algebraic geometry have been employed to study the structure of Nash equilibria, e.g., Blume and Zame [4], Blume and Zame [3], Schanuel et al. [26], (Neyman and Sorin [25], Ch.6), and the many references within. This relationship (particularly in recent years) has gone the other way as well: Nash equilibria, and the Nash equilibria correspondence, have been shown to be universal, in certain senses, for semi-algebraic sets and functions. For example, Levy [18] and Vigeral and Viossat [32] show that every non-empty compact semi-algebraic set is the projection of the set of Nash equilibria of some game,Footnote 1 and Vigeral [31] shows that for \(N \ge 3\), every such set is the set of Nash equilibrium payoffs of some N player game. Other universality results include [2, 8, 17].
One of the most prominent results on fixed-point correspondences is Browder’s theorem [7]: given a continuous mapping from \([0,1] \times X \rightarrow X\) for compact convex X in a Euclidean space, the graph of the associated fixed-point correspondence \([0,1] \rightarrow X\) has a connected component whose projection is [0, 1]. In the context of Nash equilibria, this shows that if a game is parametrized continuously by [0, 1], then the graph of the Nash equilibrium has a connected component that provides equilibria for all values of the parameter. (A useful generalization to fixed-point correspondences associated with parametrized correspondences, satisfying certain assumptions, is given in Mas-Colell [19]. Generalizations to more general parameter spaces appear in Solan and Solan [29], Solan and Solan [30].) Browder’s theorem is most well known in game theory for its use in homotopy methods and equilibrium selection, going back to Harsanyi’s tracing procedure [14]; see Herings and Peeters [15] for a modern survey of techniques. It has also been used to prove the existence of equilibria in some classes of dynamic games; see Solan and Solan [28].
In this paper, we show that the Nash equilibrium correspondence is universal—up to some massaging in the form of projecting and slicing (i.e., restricting domain)—for the class of fixed-point correspondences of parametrized semi-algebraic functions. More specifically, any semi-algebraic fixed-point correspondence is the projection of a Nash equilibrium correspondence, with some large enough sets of binary (i.e., two-action) players. This is accomplished by first extending [18, Theorem 2], which shows that any semi-algebraic continuous bounded function is the projection of a Nash equilibrium correspondence, and then creating a feedback loop which feeds the function’s output back into itself. We can then evoke the Kohlberg–Mertens structure theorem [16], which shows that the Nash equilibrium correspondence’s graph is homeomorphic (in fact, isotopic) to the space of games—a Euclidean space of appropriate dimension—to deduce that the graph of a semi-algebraic fixed-point correspondence is a slice (that is, a restriction of domain) of a projection of a manifold isotopic to a Euclidean space (or, alternatively, a projection of a slice of such a manifold).
As a corollary, we obtain a novel proof of Browder’s theorem. After first demonstrating via an approximation argument that it suffices to prove the theorem for semi-algebraic functions, we proceed essentially by making a reduction to the case when the fixed-point correspondence in question is a Nash equilibrium correspondence, and then relying on the structure provided by the Kohlberg–Mertens result. We show that if Browder’s theorem did not hold in that context, we could continuously deform the graph of the Nash equilibrium correspondence—this graph being homeomorphic, even isotopic to a Euclidean space—to the graph of a correspondence with empty values for some parameters, violating Brouwer’s theorem. Hence, we produce a proof of Browder’s theorem which makes no reliance on the machinery of the fixed-point index; this machinery was used in Browder [7]. Another such ‘direct’ proof appears in Solan and Solan [27].
The organization of the paper is as follows. Section 2 presents the preliminaries of games, semi-algebraic sets and functions, isotopies and the Kohlberg–Mertens structure theorem. Section 3 then generalizes [18, Theorem 2] to functions on unbounded domain, with the conclusion also strengthened. Section 4 presents fixed-point correspondences, and states the main results of the paper: Structure theorems for semi-algebraic fixed-point correspondences. Section 5 presents and proves Browder’s theorem. Section 6 briefly discusses some directions for future research. Section 7 gives extensions to some of the results, showing that the constructed objects can have stricter conclusions. The appendices discuss briefly the notions of the Vietoris topology induced by the Hausdorff metric (this is used in the first step of the proof of Browder’s theorem), and of the fixed-point index and Nash maps (these are used only in the extensions presented in Sect. 7).
2 Preliminaries
2.1 Games and equilibria
For a finite set of players I, with finite action spaces \((A^i)_{i \in I}\), a game is a mapping \(G:\prod _{i \in I} A^i \rightarrow \mathbb {R}^I\), which assigns to each action profile a payoff for each player. G extends multi-affinely to action profiles \(z \in \prod _{i \in I} \Delta (A^i)\), where \(\Delta (A^i)\) denotes the simplex of probability distributions on \(A^i\), by
The Nash equilibria of a game G are those \(z \in \prod _{i \in I} \Delta (A^i)\) satisfying
where \(z^{-j} = (z^i)_{i \ne j}\).
We adopt several conventions:
If \(J \subseteq I\) is a subset of players, \(G^J(z)\) denotes the payoffs to the players in J, and \(z^J\) denotes the mixed actions of the players in J; formally, \(G^J(z) = (G^i(z))_{i \in J}\), \(z^J = (z^i)_{i \in J}\).
A binary player is a player with two actions, and instead of writing a mixed action as \((q,1-q)\), we denote the mixed action by the single number \(q \in [0,1]\). Similarly, if \(x = (x_1,\ldots ,x_I) \in [0,1]^I\), we view x as a mixed-action profile of binary players I, and similarly, sets \(X \subseteq [0,1]^I\) are viewed as sets of mixed-action profiles. Often, we will define the payoff to a player expressed in terms of mixed-action profiles. As long as the defined payoff is affine separately in each player’s action, the game’s payoffs are well defined.
We will consider in this paper games where the payoffs depend, in addition to the actions of the players, also on a multi-dimensional parameter. For each value p of the parameter, let G[p] denote the induced game. The parameter input will be denoted within square brackets [, ], while the actions input will be denoted, as above, within parenthesis (, ); hence, G[p](x) denotes the payoff profile of the game G[p] under the action profile x.
2.2 Semi-algebraic sets and functions
Let \(\mathbb {R}[x_1,\ldots ,x_N]\) denote the ringFootnote 2 of polynomials in N variables, \(x_1,\ldots ,x_N\). A semi-algebraic (henceforth, s.a.) subset of \(\mathbb {R}^N\) is a set of the form
for some finite collection \((P_{i,j})_{i,j} \subseteq \mathbb {R}[x_1,\ldots ,x_N]\), where for each i, j, \(*_{i,j}\) is one of the relations \(>,<,\ge ,\le ,=,\ne \). The s.a. sets form an algebra: i.e., they are closed under finite unions, finite intersections, and complements.
Equivalently [e.g., (Bochnak et al. [5], Ch. 2)], s.a. sets are those that can be expressed as a formula in first-order logic whose atoms are of the form \(P(x) > 0\) or of the form \(P(x)=0\) for some \(P \in \mathbb {R}[x_1,\ldots ,x_N]\). In particular, we mention the Tarski–Seidenberg theorem:
Theorem 2.1
Let \(A \subseteq \mathbb {R}^N\) be s.a., let \(\pi _K:\mathbb {R}^N \rightarrow \mathbb {R}^K\) denote the projection to a subset \(K \subseteq \{1,\ldots ,N\}\) of coordinates. Then, \(\pi _K(A)\) is s.a.
A s.a. set also must have finitely many connected components.
A s.a. function (resp. correspondence) \(f:A \rightarrow \mathbb {R}^K\), where \(A \subseteq \mathbb {R}^N\), is one whose graph \(Gr(f):= \{ (x,y) \in A \times \mathbb {R}^K \mid y = f(x) \}\) (resp. \(\in f(x)\)) is s.a.: it follows from Theorem 2.1 that the domain A is s.a., and that the image/inverse image of a s.a. set under a s.a. function is also s.a. It also follows that the composition of s.a. functions is s.a.
2.3 Ambient isotopies
Fix topological spaces X, Y and embeddings \(f,g:X \rightarrow Y\).Footnote 3
-
f, g are homotopic if there is continuous \(H:[0,1] \times X \rightarrow Y\) s.t. \(f = H(0,\cdot )\), \(g= H(1,\cdot )\).
-
f, g are isotopic if \(H(t,\cdot )\) is an embedding for each \(t \in [0,1]\).
-
f, g are ambient isotopic if there is \(F:[0,1] \times Y \rightarrow Y\) s.t. \(F(0,\cdot ) \equiv id\); for each \(t \in [0,1]\), \(F(t,\cdot )\) is a homeomorphism; and \(F(1,\cdot ) \circ f = g\).Footnote 4
An ambient isotopy, the strongest of the above notions, can be thought of as a deformation of the entire space Y, which deforms one function f to the other g.
We have the notions of semi-algebraically homotopic/isotopic/ambient isotopic if the maps H/F are s.a.
2.4 Kohlberg–Mertens structure theorem
The following is a slight generalization of Kohlberg and Mertens [16], see (Demichelis and Germano [10], Sec. 3); although for simplicity, we restrict the statement to binary players. Let \(\mathfrak {G}(J)\) denote the space of all games with J binary players, identified with \(\mathbb {R}^{J \times 2^J}\). Recall that \([0,1]^J\) in this case is identified with the space of mixed-action profiles. Let \(\mathcal {E}\) denote the manifold of Nash equilibria
\(\mathcal {E}\) is easily seen to be s.a.
Theorem 2.2
There is a s.a. homeomorphism \(\Phi :\mathfrak {G}(J) \times \mathbb {R}^J \rightarrow \mathfrak {G}(J) \times \mathbb {R}^J\) s.t.:
-
\(\Phi (\mathcal {E}) = \mathfrak {G}(J) \times \{ \overline{0}^J \}\), where \(\overline{0}^J = (0,\ldots ,0) \in \mathbb {R}^J\).
-
\(\Phi \) is semi-algebraicallyFootnote 5 ambient isotopic to the identity.
Remark 2.1
It follows that the projection \(prj:\mathcal {E}\rightarrow \mathfrak {G}(J)\) is homotopic to a homeomorphism, in the sense that there is a homeomorphism \(\phi :\mathfrak {G}(J) \rightarrow \mathcal {E}\) s.t. \(prj \circ \phi \) is homotopic to the identity; in this case, \(\phi = \Phi ^{-1}\mid _{ \mathfrak {G}(J) \times \{ \overline{0}^J \}}\).
3 Representation of functions via Nash equilibrium correspondences
The following is (Levy [18], Theorem 2):
Theorem 3.1
Let \(A \subseteq \mathbb {R}^N\) be bounded and s.a.; and let \(f:A \rightarrow [0,1]^K\) be a continuous s.a. function. Then, there exists a set of binary players \(J:= \{ \alpha _1,\ldots ,\alpha _K \} \cup J_0\) and a mapping \(G:\mathbb {R}^N \rightarrow \mathfrak {G}(J)\) affine in each coordinate, such that for each \(p \in A\), in any equilibrium z of G[p], we have \((z^{\alpha _1},\ldots ,z^{\alpha _K}) = f(p)\).
Here, we prove that Theorem 3.1 holds for domain A not necessarily bounded, and that the mapping G can be strengthened to be affine (not just affine in each coordinate); as we will see in Sect. 7, the conclusion can be strengthened further.
Theorem 3.2
Let \(A \subseteq \mathbb {R}^N\) be s.a.; and let \(f:A \rightarrow [0,1]^K\) be a continuous s.a. function. Then, there exists a set of binary players \(J:= \{ \alpha _1,\ldots ,\alpha _K \} \cup J_0\) and a mapping \(G:\mathbb {R}^N \rightarrow \mathfrak {G}(J)\) affine, such that for each \(p \in A\), in any equilibrium z of G[p], we have \((z^{\alpha _1},\ldots ,z^{\alpha _K}) = f(p)\).
It turns out the fact that G is affine is already part of the construction in Levy [18], but was not identified there. However, while extending to unbounded domain, we will get this affinity ‘for free’. The proof proceeds in two steps: the first step will introduce several auxiliary games and mappings. The second step will construct the mapping \(G:\mathbb {R}^N \rightarrow \mathfrak {G}(J)\), relying on Theorem 3.1.
Proof
Step #1: We construct, in three sub-steps, an auxiliary game \(\tilde{H}\) which will be use to simulate copying the real line to the interval (0, 1). Observe the following useful two-player game, which depends on the parameter q (for \(q = \frac{1}{2}\), this is the game matching pennies), which was introduced in Levy [18]:
For \(0< q <1\), the unique equilibrium is \((q,1-q) \otimes (q,1-q)\); for \(q \in \{0,1\}\), the set of equilibria is \(\{ (q,1-q) \otimes (w,1-w) \mid w \in [0,1] \}\); for \(q>1\) (resp. \(q<0\)), the unique equilibrium is \((1,0) \times (0,1)\) (resp. \((0,1) \times (1,0)\)). Hence, denoting
we obtain that for any \(q \in \mathbb {R}\) and equilibrium \((z^\alpha ,z^\beta )\) of H[q], it holds that \(z^\alpha = u(q)\).
Define
Observe that \(H[\cdot ,\cdot ]\) depends (jointly) affinely on (q, r), and if \(|q| < r\), then \(0< \frac{1}{2}(\frac{q}{r} + 1) < 1\), and hence, the unique equilibrium of H[q, r] is for each to play their first action with weight \(\frac{1}{2}(\frac{q}{r} + 1)\).
Observe that the map \(\phi :\mathbb {R}^N \rightarrow (-1,1)^N\) given by
is a s.a. homeomorphism of \(\mathbb {R}^N\) with the open box \((0,1)^N\).
Finally, define a three-player game \(\tilde{H}\), with binary players \(\beta ,\gamma ,\delta \), which depends on real parameter q, by
The definition is legitimate, as \(H[q,1 \pm q]\) are both affine in q. It follows that if z is an equilibrium of \(\tilde{H}[q]\), \(q \in \mathbb {R}\), then \(z^{\beta ,\gamma }\) is an equilibrium of \(H[q,1+|q|]\), and therefore, \(z^\beta = \frac{1}{2} (\frac{q}{1+|q|} + 1)\).
Step #2: Now, we can proceed to the choice of \(J \ge K\) and the construction of the mapping \(G:\mathbb {R}^N \rightarrow \mathfrak {G}(J)\). Suppose \(A \subseteq \mathbb {R}^N\) is s.a., and \(f:A \rightarrow [0,1]^K\) is s.a. Denote \(g = f \circ \phi ^{-1}\), for \(\phi \) defined in (3.4), which is a s.a. map \(g:\phi (A) \rightarrow [0,1]^K\). \(\phi (A) \subseteq (0,1)^N\), and hence is s.a. and bounded. Heuristically, what we shall do is follows: N copies of the games \(\tilde{H}\), one acting on each input coordinate, will simulate the function \(\phi \) defined in (3.4), and hence transform the domain A to a bounded domain \(\phi (A)\). Then, using Theorem 3.1, we will find a game which simulates the function g on the bounded domain \(\phi (A)\). The composition of these constructions will give the original function f. This is shown in Fig. 2, with the notations being defined below.
By Theorem 3.1, there is a collection \(J':= \{ \alpha _1,\ldots ,\alpha _K \} \cup J'_0\) of binary players, and a mapping \(G':\mathbb {R}^N \rightarrow \mathfrak {G}(J')\) affine in each coordinate s.t. for each \(q \in \phi (A)\), in any equilibrium z of \(G'[q]\), \(z^\alpha := (z^{\alpha _1},\ldots ,z^{\alpha _K}) = g(q)\); we use the notation \(z^\alpha \) for brevity, which will apply to the K-profile \(z^\beta \) below as well.
Add to \(J'\) binary players \(( \beta _j, \gamma _j, \delta _j)_{j=1}^N\), denoting the enlarged set \(J:= J' \cup (\beta _j, \gamma _j, \delta _j)_{j=1}^N\). The payoffs are given, for \(p= (p_1,\ldots ,p_N) \in \mathbb {R}^N\), by
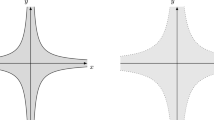
These are portrayed in Fig. 1 for \(N=2\). Then, we set
As stated, this is shown in Fig. 2.

The Case \(N=2\), parameter \(p=(p_1,p_2)\)

Completing Proof of Theorem 3.2
In any equilibrium z of G[p], \(p = (p_1,\ldots ,p_N) \in A\), \(z^{J'}\) is an equilibrium of \(G'[z^\beta ]\) and for \(j=1,\ldots ,K\), \(z^{\beta _j,\gamma _j,\delta _j}\) is an equilibrium of \(\tilde{H}[p_j]\). By the properties of these games, respectively, \(z^\beta = \phi (p)\) and \(z^\alpha = g(z^\beta )\). Together, these imply \(z^\alpha = g(\phi (p)) = f(p)\), as required.
Furthermore, the map \(G:\mathbb {R}^N \rightarrow \mathfrak {G}(J)\) is affine, as \(\tilde{H}\) depends affinely on a single coordinate, and the parameters \((p_1,\ldots ,p_N)\) only effect the payoffs via (3.7). \(\square \)
Remark 3.1
(Levy [18], Theorem 3) generalizes Theorem 3.1 to certain correspondences; specifically, if F is a convex-valued upper semicontinuous correspondence from a bounded s.a. set \(A \subseteq \mathbb {R}^N\) to \([0,1]^K\), then there exists a set of binary players \(K=\{\alpha _1,\ldots ,\alpha _K\}\cup J_0\) and a mapping \(G:\mathbb {R}^N \rightarrow \mathfrak {G}(J)\) affine in each coordinate, s.t. for \(p \in A\)
Theorem 3.2 generalizes similarly to convex-valued upper semicontinuous correspondences, as do Theorem 4.1 and Theorem 4.2 in Sect. 4 below, as well as Browder’s Theorem, Theorem 5.1 in Sect. 5. [Such generalizations of Browder’s theorem have been known, see e.g., (Mas-Colell [19], Theorem 3) and the references in the remark after it.]
4 Fixed-point correspondences
Given parameter set T and space X, and \(f:T \times X \rightarrow X\), we have the fixed-point correspondence \(\mathcal{F}\mathcal{P}(f):T \rightarrow X\) given by
When \(f:X\rightarrow X\), we also denote its fixed points as \(\mathcal{F}\mathcal{P}(f)\); hence, when \(f:T \times X \rightarrow X\) and \(p \in T\), \(\mathcal{F}\mathcal{P}(f)(p) = \mathcal{F}\mathcal{P}(f(p,\cdot ))\). Note that when \(T=[0,1]\), as in the example below, f is a homotopy.
Example 1
Define \(f_0:[0,1] \rightarrow [0,1]\) by
Note that \(f_0\) is continuous and \(0.05 \le f_0 \le 0.65\). Then, define a parametrized function (a homotopy, in this case) \(f:[0,1] \times [0,1] \rightarrow [0,1]\) by
See Fig. 3, which shows the graph of \(f(p,\cdot )\) for values of \(p=0,\frac{1}{3},\frac{1}{2},\frac{2}{3},1\). For values of the parameter \(p<\frac{1}{3}\), e.g.,  , the function
, the function  has a single fixed point. As p increases, \(f(p,\cdot )\) homotopes upward. For
has a single fixed point. As p increases, \(f(p,\cdot )\) homotopes upward. For  , the function
, the function  has two fixed points. For \(\frac{1}{3}< p < \frac{2}{3}\), e.g.,
has two fixed points. For \(\frac{1}{3}< p < \frac{2}{3}\), e.g.,  , the function
, the function  has three fixed points. At
has three fixed points. At  , the function
, the function  again has two fixed points; and for \(p>\frac{2}{3}\), e.g.,
again has two fixed points; and for \(p>\frac{2}{3}\), e.g.,  , the function
, the function  again has a single fixed point. For each value of p, the fixed points are given byFootnote 6
again has a single fixed point. For each value of p, the fixed points are given byFootnote 6
The fixed-point correspondence, as a function of p, is shown on the right-hand side of the figure; the zig-zag curve is the graph of the correspondence \(\mathcal{F}\mathcal{P}(f)\).
If f is s.a., then so is \(\mathcal{F}\mathcal{P}(f)\), i.e., \(Gr(\mathcal{F}\mathcal{P}(f))\) is s.a. Recall that \(\mathfrak {G}(J)\) denotes the space of games with J binary players.

A fixed-point correspondence
Theorem 4.1
Fix \(f:\mathbb {R}^M \times [0,1]^K \rightarrow [0,1]^K\) s.a. and continuous. There exist \(\overline{K} \in \mathbb {N}\), \(\overline{K} \ge K\), and an affine injective map \(T:\mathbb {R}^M \rightarrow \mathfrak {G}(\overline{K})\), such that
where \(\mathcal {E}_q = \{ x \in \mathbb {R}^{\overline{K}} \mid (q,x) \in \mathcal {E}\}\), \(\mathcal {E}\) is the manifold of Nash equilibria of \(\overline{K}\) binary players.
Remark 4.1
By a s.a. version of the Urysohn–Tietze extension theorem [e.g., (Bochnak et al. [5], Prop. 2.6.9.)], a continuous bounded s.a. function on a closed set can be extended, with the same bound, to an s.a. function on the entire Euclidean space. Therefore, Theorem 4.1, and hence also Theorem 4.2 below, apply to \(f:A \times [0,1]^K \rightarrow [0,1]^K\) for closed s.a. \(A \subseteq \mathbb {R}^M\); (4.1) and (4.2) then hold for \(\forall p \in A\).
Proof
The idea is as follows: Using Theorem 3.2, we will have a collection of players who simulate the function f(p, x); so that in any equilibrium of G[p, x], \(x^\alpha = f(p,x)\), where \(x^\alpha = (x^{\alpha _1},\ldots ,x^{\alpha _K})\). We then have other players who will (with the help of some others) copy \(x^\alpha \)—essentially, simulating the identity function—so that in equilibrium \(x^\beta \big (= (x^{\beta _1},\ldots ,x^{\beta _K})\big ) = x^\alpha \). We then create a feedback loop; while the input of the parameter p is exogeneous, the parameter x will be endogenous; it will be \(x^\beta \) itself. Hence, for each input p, in equilibrium, \(x^\alpha = f(p,x^\beta )\) and \(x^\beta = x^\alpha \). This is portrayed in Fig. 4, with the notations being introduced below.
By Theorem 3.2, there are \(J \ge K\) players, and an affine mapping \(G:\mathbb {R}^{M + K} \rightarrow \mathfrak {G}(J)\), such that for all \(p \in \mathbb {R}^M\) and \(x \in [0,1]^K\), denoting the first K players of J as \(\alpha _1,\ldots ,\alpha _K\), it holds that for each equilibrium \(z = (z^j)_{j \in J}\) of G[p, x], \(z^\alpha := (z^{\alpha _1},\ldots ,z^{\alpha _K}) = f(p,x)\). Denote \(J_0 = J \backslash \{ \alpha _1,\ldots ,\alpha _K \}\). Now, we create a feedback loop: to J, add players \((\beta _i,\gamma _i)_{i=1}^K\), denoting \(\overline{K} = J \cup (\beta _i,\gamma _i)_{i=1}^K\). In the game T[p], the players in J will play the game \(G[p,x^\beta ]\), and for each i, the players \(\beta _i,\gamma _i\) will play \(H[x^{\alpha _i}]\). Formally, define \(T:\mathbb {R}^M \rightarrow \mathfrak {G}(\overline{K})\) by
for each \(j \in J\), where \(x^J = (x^j)_{j \in J}\), and for \(i=1,\ldots ,K\)
where \(H[\cdot ]\) was defined in (3.1). As mentioned, the loop we have constructed is portrayed in Fig. 4.

Feedback loop in Proof of Theorem 4.1
For each \(p \in \mathbb {R}^m\), we see that in any equilibrium \(x \in [0,1]^{\overline{K}}\) of T[p], \(x^{\beta _i} = x^{\alpha _i}\) for \(i=1,\ldots ,K\)—since we know that in any equilibrium of H[q] for \(q \in [0,1]\), the first player plays q—and \(x^\alpha = (x^{\alpha _1},\ldots ,x^{\alpha _K}) = f(p, x^\beta )\)—since, by construction, in any equilibrium of G[p, x] for \(p \in A\) and \(x \in [0,1]^K\), the players \(\alpha _1,\ldots ,\alpha _n\) play the profile f(p, x). Hence, in any equilibrium \(x \in [0,1]^{\overline{K}}\) of T[p], \(x^\alpha = x^\beta = f(p,x^\alpha )\). Similarly, for any fixed point \(z \in [0,1]^K\) of \(f(p,\cdot )\), there is an equilibrium \(x \in [0,1]^{\overline{K}}\) of T[p] with \(x^\alpha = z\): indeed, let \(x^J\) be an equilibrium of G[p, z], which implies \(x^\alpha = f(p,z)=z\), and set \(x^{\beta _i} =x^{\gamma _i} = z_i\) for each \(i=1,\ldots ,K\). Hence, (4.1) holds.
Finally, note that the mapping \(T[\cdot ]\) need not be injective—only that \(T[p'] \ne T[p'']\) if \(f(p',\cdot ) \ne f(p'',\cdot )\), as \(G[p'] \ne G[p'']\) in that case—but this can be rectified, e.g., by adding M dummy players (i.e., whose payoffs do not depend in any actions) with payoff profile p. \(\square \)
Now, given \(f:\mathbb {R}^M \times [0,1]^K \rightarrow [0,1]^K\) s.a. and continuous, we can apply Theorem 4.1 to f to obtain \(\overline{K} \ge K\) and an affine injective map \(T:\mathbb {R}^M \rightarrow \mathfrak {G}(\overline{K})\) satisfying (4.1). Denote \(\overline{M}= \overline{K}\times 2^{\overline{K}} = \mathrm{{dim}}(\mathfrak {G}(\overline{K}))\). Hence, applying the Kohlberg–Mertens structure theorem, Theorem 2.2, to the manifold of Nash equilibria \(\mathcal {E}\subseteq \mathfrak {G}(\overline{K}) \times [0,1]^{\overline{K}} = \mathbb {R}^{\overline{M}} \times [0,1]^{\overline{K}}\) over binary games with \(\overline{K}\) players, yields the following structure theorem, which abstracts away from games:
Theorem 4.2
Fix \(f:\mathbb {R}^M \times [0,1]^K \rightarrow [0,1]^K\) s.a. and continuous. Then, there exist:
-
Integers \(\overline{M}\ge M, \overline{K}\ge K\).
-
A s.a. manifold \(\mathcal {E}\subseteq \mathbb {R}^{\overline{M}} \times [0,1]^{\overline{K}}\).
-
An injective affine map \(T:\mathbb {R}^M \rightarrow \mathbb {R}^{\overline{M}}\), such thatFootnote 7
$$\begin{aligned} \mathcal{F}\mathcal{P}(f)(p) = prj_{ \mathbb {R}^{\overline{K}} \rightarrow \mathbb {R}^K }(\mathcal {E}_{T(p)}),~\forall p \in \mathbb {R}^M, \end{aligned}$$(4.2)where \(\mathcal {E}_q = \{ x \in \mathbb {R}^{\overline{K}} \mid (q,x) \in \mathcal {E}\}\).
-
And a s.a. homeomorphism of \(\mathbb {R}^{\overline{M}} \times \mathbb {R}^{\overline{K}}\) which induces a homeomorphism of \(\mathcal {E}\) with \(\mathbb {R}^{\overline{M}} \times \{ \overline{0}^{\overline{K}} \}\), where \(\overline{0}^K \in \mathbb {R}^{\overline{K}}\), and which is s.a. ambient isotopic to the identity.
It follows that there is an affine subspace \(U:= T(\mathbb {R}^M)\) of \(\mathbb {R}^{\overline{M}}\) of dimension M, such that
The last part of the theorem says that the graph of the fixed-point correspondence associated with f is a slice of a projection, as well as a projection of a slice, of the manifold \(\mathcal {E}\), which satisfies the properties above; see Fig. 5.Footnote 8

Theorem 4.2
Remark 4.2
As per Remark 2.1, it follows that the projection \(prj:\mathcal {E}\rightarrow \mathbb {R}^{\overline{M}}\) is homotopic to a homeomorphism, in the sense that there is a homeomorphism \(\phi :\mathbb {R}^{\overline{M}} \rightarrow \mathcal {E}\) s.t. \(prj \circ \phi \) is homotopic to the identity.
5 Browder’s theorem
The following is a particular case of Browder’s Theorem Browder [7]:
Theorem 5.1
Let \(X \subseteq \mathbb {R}^K\) be compact and convex, \(f:[0,1] \times X \rightarrow X\) be continuous. Then, there is a connected component C of \(Gr(\mathcal{F}\mathcal{P}(f)) = \{ (p,x) \mid f(p,x) = x \}\) s.t. \(prj_{[0,1]}(C) = [0,1]\).
We give a proof of this theorem using Theorem 4.2, without needing to resort to using the fixed-point index.Footnote 9 The proof proceeds in five steps, heuristically described as follows:
-
1.
We first show, via an approximation argument, that it suffices to prove Browder’s theorem for s.a. functions.
-
2.
We then make a reduction to proving Browder’s theorem for a fixed-point correspondence whose graph, like a Nash equilibrium correspondence, is a slice \(\mathcal {E}_I\) of a manifold \(\mathcal {E}\subseteq \mathbb {R}^{\overline{K}} \times \mathbb {R}^{\overline{M}}\) homeomorphic to a Euclidean space (via a homeomorphism homotopic to the identity, in the sense of Remark 4.2).
-
3.
We then, by way of contradiction, separate by open sets those components of \(\mathcal {E}_I\) whose projection includes 0 (under the projection \([0,1]\times X \rightarrow [0,1]\)) and those components whose projection does not include 0, and identify how the domain of the correspondence can be extended via \(\mathcal {E}\) to a narrow tube \([0,1] \times B_\varepsilon \subseteq \mathbb {R}^{\overline{K}}\) around [0, 1] in which this separation, when ’fattened’ to the tube, still holds.
-
4.
We then show how we can homotope the manifold (by changing it only over \([0,1] \times B_\varepsilon \)), so that its projection to \(\mathbb {R}^{\overline{K}}\) is no longer surjective.
-
5.
Finally, we use Brouwer’s theorem to deduce a contradiction; indeed, the manifold \(\mathcal {E}\) lies like an infinite cloud over a Euclidean space, and the deformation above (which is constructed under the assumption of a failure of Browder’s theorem) allows ’sunlight to shine through it’.
Proof
W.l.o.g. \(X=[0,1]^K\).
Step #1: We first claim it suffices to prove Browder’s theorem for f s.a.; suppose this has been done. The continuous s.a. functions (in fact, polynomials) are dense w.r.t. uniform convergence in the space of continuous functions \([0,1] \times X \rightarrow X\); hence, let \((f_n)_{n=1}^\infty \) be such s.a. functions with \(f_n \rightarrow f\) uniformly. For each n, let \(C_n \subseteq [0,1] \times X\) be a connected component of \(\mathcal{F}\mathcal{P}(f_n)\) with \(prj_{[0,1]} (C_n) = [0,1]\); each \(C_n\) is compact. The space of compact subsets of \([0,1] \times X\) is compact in the Vietoris topology (see the Appendix, Sect. 8, for a discussion of this topology), and by passing to a subsequence, we may assume \(C_n \rightarrow C\). C is connected as the limit of connected sets; see Lemma 8.1 of the Appendix. \([0,1] = prj_{[0,1]} (C_n) \rightarrow prj_{[0,1]} (C)\) by Lemma 8.2 of the Appendix, so \(prj_{[0,1]} (C) = [0,1]\). From the continuity of f, \(C \subseteq \mathcal{F}\mathcal{P}(f)\). Hence, the connected component of \(\mathcal{F}\mathcal{P}(f)\) containing C is the desired component.
Hence, we proceed under the assumption that f is s.a., with \(X=[0,1]^K\).
Step #2: By Theorem 4.2 (and Remark 4.1), we may assume that there are \(\overline{M}\ge 1\), \(\overline{K}\ge K\), a manifold \(\mathcal {E}\subseteq \mathbb {R}^{\overline{M}} \times [0,1]^{\overline{K}}\) for which (see Remark 4.2), there is a homeomorphism \(\phi :\mathbb {R}^{\overline{M}} \rightarrow \mathcal {E}\) s.t. \((prj_{\mathbb {R}^{\overline{M}+ \overline{K}} \rightarrow \mathbb {R}^{\overline{M}}}) \circ \phi \) is homotopic to the identity, and an affine embedding \(T:\mathbb {R}\rightarrow \mathbb {R}^{\overline{M}}\) s.t. \(\mathcal{F}\mathcal{P}(f)(p) = prj_{\mathbb {R}^{\overline{K}} \rightarrow \mathbb {R}^K} (\mathcal {E}_{T(p)})\) for all \(p \in [0,1]\). By applying an affine homeomorphism to \(\mathbb {R}^{\overline{M}}\), we may assume w.l.o.g. \(T(p) = (p,0^{\overline{M}-1}) \in \mathbb {R}^{\overline{M}}\) for \(p \in \mathbb {R}\).
Denote \(\overline{X} = [0,1]^{\overline{K}}\), so \(\mathcal {E}\subseteq \mathbb {R}^{\overline{M}} \times \overline{X}\).
Suppose, by way of contradiction, that the theorem does not hold for f. We claim that there is also no connected component C of
which satisfies \(prj_{[0,1] \times \overline{X} \rightarrow [0,1]} (C) = [0,1]\). Indeed, if there were such a component, then the component \(C'\) of \(Gr(\mathcal{F}\mathcal{P}(f))\) which contains \(prj_{[0,1] \times \overline{X} \rightarrow [0,1] \times X} (C)\) would be the desired component of \(Gr(\mathcal{F}\mathcal{P}(f))\), since we would have
Hence, we have reduced the problem to proving that the correspondence with graph \(\mathcal {E}_I\) has a component whose projection is [0, 1].

Separating components of \(\mathcal {E}_I\)
Steps #3, #4, #5 are hence dedicated to proving the following claim, which we state as a separate proposition:
Proposition 5.1
Let \(\overline{M}\), \(\overline{K}\in \mathbb {N}\), and let \(\mathcal {E}\subseteq \mathbb {R}^{\overline{M}} \times [0,1]^{\overline{K}}\) be an s.a. closed set for which there is a homeomorphism \(\phi :\mathbb {R}^{\overline{M}} \rightarrow \mathcal {E}\) s.t. \((prj_{\mathbb {R}^{\overline{M}+ \overline{K}} \rightarrow \mathbb {R}^{\overline{M}}}) \circ \phi \) is homotopic to the identity. Then, there is a connected component C of \(\mathcal {E}\cap \Big ( [0,1] \times \{\overline{0}^{\overline{M}- 1} \} \times [0,1]^{\overline{K}} \Big )\) s.t. \(prj_{\mathbb {R}^{\overline{M}+ \overline{K}} \rightarrow [0,1]}(C) = [0,1]\).
Step #3: As \(\mathcal {E}_I\) is s.a., it has finitely many connected components; hence, there are disjoint open sets \(W^0,W^1\) in \([0,1] \times \overline{X}\), which cover \(\mathcal {E}_I\) s.t. \((\{0\} \times \overline{X}) \cap W^1 = \emptyset \), \((\{1\} \times \overline{X}) \cap W^0 = \emptyset \). See Fig. 6.
Fix some norm \(||\cdot ||\) on \(\mathbb {R}^{\overline{M}-1}\). Denote for \(\varepsilon \ge 0\), \(i=1,2\)
and \(\mathcal {E}_\varepsilon : = \mathcal {E}\cap ([0,1] \times B_\varepsilon \times \overline{X})\) (note \(\mathcal {E}_0 \subseteq [0,1] \times \{ \overline{0}^{\overline{M}- 1} \} \times \overline{X}\) and \(prj_{[0,1] \times \overline{X}}(\mathcal {E}_0)=\mathcal {E}_I\)) is the part of the manifold \(\mathcal {E}\) over the tube \([0,1] \times B_\varepsilon \); since \(\mathcal {E}_0\) is compact and \(\mathcal {E}_0 \subseteq W^0_0 \cup W^1_0\), it holds that for \(\varepsilon >0\) small enough, \(\mathcal {E}_\varepsilon \subseteq W_\varepsilon ^0 \cup W_\varepsilon ^1\). Fix some such \(\varepsilon >0\).
Step #4: Define now a homotopy mapping \(H:[0,1] \times \mathcal {E}_\varepsilon \rightarrow [0,1] \times B_\varepsilon \times \overline{X}\) in the following way: first, for \( q \in \mathbb {R}^{ \overline{M}- 1}\), let \(g(q) = 1 - \frac{1}{\varepsilon }||q||\); note that \(0 \le g \le 1\), \(g(0)=1\), \(g(\partial B_\varepsilon )=0\). Then, define
See Fig. 7. H is continuous, as \(W_\varepsilon ^0,W_\varepsilon ^1\) are open and disjoint. Furthermore, \(H(t,(p,q, x)) = (p,q, x)\) if \((p,q) \in \partial ([0,1] \times B_\varepsilon )\), i.e., when \(p = 0,1\) or \(||q||=\varepsilon \). Hence, H extends continuously to \([0,1] \times \mathcal {E}\rightarrow \mathbb {R}^{\overline{M}} \times \overline{X}\) by \(H(t,\cdot ) = id\) outside of \([0,1] \times B_\varepsilon \times \overline{X}\). Observe \(H(0, \cdot ) \equiv id\) on \(\mathcal {E}\).

The Homotopy \(H(\cdot ,\cdot )\)
Step #5: Let \(p = prj_{\mathbb {R}^{\overline{M}} \times \mathbb {R}^{\overline{K}} \rightarrow \mathbb {R}^{\overline{M}}}\). Recall that \(\phi :\mathbb {R}^{\overline{M}} \rightarrow \mathcal {E}\) is a homeomorphism s.t. \(p\circ \phi :\mathcal {E}\rightarrow \mathbb {R}^{\overline{M}}\) is homotopic to the identity. It follows that \(p(\infty )=\infty \). Define for \(t \in [0,1]\), \(q_t:\mathcal {E}\rightarrow \mathbb {R}^{\overline{M}}\) by \(q_t = p(H(t,\cdot ))\); note \(q_0=p\). Since \(p \circ \phi \) is homotopic to the identity, so is \(q_1 \circ \phi \), and also \(p \circ \phi (\infty ) = q_1 \circ \phi (\infty ) = \infty \), because, for each t, \(H(t,\cdot )\) is the identity outside of the compact \(p^{-1}([0,1] \times B_\varepsilon ) \cap \mathcal {E}\). Hence, by Brouwer’s theorem, \(q_1 \circ \phi \) is surjective, and hence so is \(q_1\), but \(q_1(\mathcal {E}) \cap \Big ((0,1) \times \{ 0^{\overline{M}-1}\}\Big ) = \emptyset \), a contradiction.
\(\square \)
6 Open directions
A natural question is whether the structure theorem, Theorem 4.2, can be extended, with appropriate changes, to fixed-point correspondences induced by functions that are not semi-algebraic, rather satisfy some weaker or different regularity property; e.g., analytic, or O-minimal (see Dries [11]).
One also wonders what other existing theorems on the structure of fixed-point correspondences can be proved using Theorem 4.2, like we have proved Browder’s theorem; e.g., the fixed-point theorem of McLennan [20], which also has natural game-theoretic connections. More generally, one would hope that the tools presented here can help to eventually characterize precisely which upper semicontinuous correspondences are induced as fixed-point correspondences.
Finally, a related and curious open question concerning fixed-point correspondences is whether they are closed under projections. Specifically, let \(K,N \in \mathbb {N}\), let \(P \subseteq \mathbb {R}^N\) be a space of parameters, and let \(f:P \times [0,1]^K \rightarrow [0,1]^K\) be continuous. Let \(K' < K\) and denote \(p:= prj_{\mathbb {R}^K \rightarrow \mathbb {R}^{K'}}\). Must there exist continuous \(g:P \times [0,1]^{K'} \rightarrow [0,1]^{K'}\) s.t. \(\mathcal{F}\mathcal{P}(g)(\cdot ) \equiv p \circ \mathcal{F}\mathcal{P}(f)(\cdot )\)? In particular, when P, f are semi-algebraic, one wonders if the tools in this paper can help shine some light on this question.
7 Refinements
We give here refinements to the theorems we have presented. The first extends Theorem 3.2:
Theorem 7.1
In Theorem 3.2, the mapping G can be chosen s.t. for each \(p \in A\), the set of equilibria of G[p] is connected.
The connectedness properties will require some examination of the proofs from (Levy [18], Theorem 2) and is carried out below.
For the next theorem, which extends Theorem 4.1, the reader is referred to the Appendix, Sect. 9 for a review on fixed-point indices and Nash maps.
Theorem 7.2
In Theorem 4.1, \(\overline{K},T\) can be chosen s.t. for each \(p \in \mathbb {R}^M\) and each connected component C of \(\mathcal{F}\mathcal{P}(f)(p)\), \(\Psi [p](C):= prj^{-1}(C) \cap \mathcal {E}_{T(p)}\) is connected,Footnote 10 and its fixed-point index under \(f(p,\cdot )\) is equal to the fixed-point index of \(\Psi [p](C)\) under a Nash map.
Note that \(\Psi [p](C)\) are those equilibrium in T[p] which project into C. The proof appears below. The first assertion, concerning the connectedness, will follow fairly directly from the extension given by Theorem 7.1. To show the latter assertion, concerning the indices, we will first claim that, using the semi-algebraic structure, that we can choose finitely many parameters \((q^*_i)_{i=1}^L\) in the domain \(\mathbb {R}^M\) of f s.t. if the conclusion holds at the L parameters \((q^*_i)_{i=1}^L\), then it holds everywhere. (We will refer to points in the domain of f and its extension \(\tilde{f}\), defined shortly, as parameters for clarity.) We then extend the domain of f from \(\mathbb {R}^M \sim \mathbb {R}^{M} \times \{0\}\) to a function \(\tilde{f}\) on \(\mathbb {R}^{M+1}\), such that two properties hold: First, from each \((q^*_i,0)\) one can move to a parameter nearby, say \((q^*_i,1)\), s.t. \(\tilde{f}((q^*_i,1), \cdot )\) is close to \(\tilde{f}((q^*_i,0), \cdot ):= f(q^*_i,\cdot )\) but with only finitely many fixed-points, all of which have fixed-point index \(\pm 1\), denoted \((z_{i,j})_{j}\). Second, for each of these points \(z_{i,j}\), if \(z_{i,j}\) has index \(+1\) one can move to a parameter \(r_{i,j}\) near \((q^*_i,1)\) in such a way that \(\tilde{f}((q^*_i,1),\cdot )\) homotopes to \(\tilde{f}(r_{i,j},\cdot )\) with \(z_{i,j}\) being the only fixed-point— hence, \(\Psi [r_{i,j}](z_{i,j})\) has index \(+1\) under a Nash map as it is the entire set \(\mathcal {E}_{T[r_{i,j}]}\), where T is the embedding induced by applying Theorem 4.1 to \(\tilde{f}\)— while if \(z_{i,j}\) has index \(-1\), one can move to a parameter \(r_{i,j}\) in such a way that \(\tilde{f}\) homotopes \(z_{i,j}\) to cancel out with another point \(z_{i,j'}\) of index \(+1\), which will show that that \(\Psi [r_{i,j}](z_{i,j})\) has index \(-1\). See Figs. 9 and 10.
The following lemma will be useful in proofs of the extensions:
Lemma 7.1
Let X, Y be compact Hausdorff spaces, \(S \subseteq X \times Y\) closed with \(prj_X(S)\) connected, and for each \(x \in prj_X(S)\), \(prj_X^{-1}(x) \cap S\) is connected. Then, S is connected.
Proof
Suppose not; then S can be written as the disjoint union of two non-empty compact subsets \(S_1,S_2\), with U, V disjoint open sets \(U \cap S = S_1\), \(V \cap S = S_2\). Since \(prj_X(S)\) is connected and \(prj_X(S_1)\), \(prj_X(S_2)\) are also compact, and hence, they cannot be disjoint, as non-empty disjoint compact subsets of a Hausdorff space can be separated by open sets [e.g., (Munkres [23], Theorem 32.3)]. Therefore, there is \(x^* \in prj_X(S_1) \cap prj_X(S_2)\). Since \(prj_X^{-1}(x^*) \cap S\) is connected, \(U \cap V\) cover \(prj_X^{-1}(x^*) \cap S\), which intersects both \(S_1,S_2\), a contradiction. \(\square \)
Proof of Theorem 7.1
The following lemma follows by an induction on the size of \(\mathcal {P}\) using Lemma 7.1; see Fig. 8.
Lemma 7.2
Let G be a game with players J, let \(\mathcal {P}\) be a partition of J and \(\prec \) a strict partial ordering on the elements of \(\mathcal {P}\), s.t.:
-
The payoffs of players in partition element \(P \in \mathcal {P}\) depend only on players in P and on players in partition elements \(P' \in \mathcal {P}\) with \(P' \prec P\).
-
For each \(P \in \mathcal {P}\), and each profile \(x_{\prec P}\) of players in partition elements \(P' \in \mathcal {P}\) with \(P' \prec P\), the set of equilibria of the game for the players in P, i.e., of the game \(G^P(\cdot , x_{\prec P})\), is connected.
Then, the set of equilibria of G is connected.

A structure as in Lemma 7.2; each \(P_i\) is a collection of players; \(P_i \prec P_j\) if there is a directed path from \(P_i\) to \(P_j\). Note that, in general, there may be multiple graph components
Now, we see how this applies to our case, beginning with games resulting from Theorem 3.1, and then to the modified construction in Theorem 3.2. As per the construction in (Levy [18], Sec. 4.1), it suffices to prove the case \(K=1\), i.e., when the function’s output is single-dimensional, and then apply the result to each coordinate separately; so write \(\alpha \) instead of the player \(\alpha _1\). Recall the auxiliary games \(H[\cdot ]\), \(H[\cdot ,\cdot ]\), and \(\tilde{H}[\cdot ]\) from (3.1), (3.3), (3.5), and (3.6).
-
(Levy [18], Sec. 4.1.1) first constructs a family of functions for which the theorem holds, doing so recursively with the ‘directed structure’ described in Lemma 7.2, where each class P is either a single player— in which case, for any \(p \in A\), the equilibria of \(G'^P[p](\cdot , x_{\prec P})\) is either a pure singleton or any mixture in [0, 1]— or a pair of agents playing H[q] for some q, which depends on \(x_{\prec P}\)— which is also necessarily connected. To elaborate a little more:
-
Section 4.1.1, up through Corollary 6, inductively proves the theorem for polynomials via such recursive constructions.
-
Section 4.1.1, Proposition 4.7, then shows that the family of functions for which the theorem holds is closed under pointwise minima/maxima, again via such recursive constructions.
-
-
Take the specific function on a bounded domain in our context, \(g=f \circ \phi ^{-1}\), \(\mathrm{{dom}}(g) \subseteq (0,1)^N\), as introduced in the proof of Theorem 3.2 (recall that we are assuming that f, g are real-valued functions). (Levy [18], Sec. 4.2) then shows that there are two functions, \(\psi _+,\psi _-\), in the class of functions generated by polynomials and pointwise minima/maxima, with \(\psi _+\) (resp. \(\psi _-\)) being a function of \(N+1\) variables with image \(\subseteq [0,1]\), s.t. for \(p \in \mathrm{{dom}}(g)\subseteq (0,1)^N\) and \(p_{N+1} \in [0,1]\), \(\psi _+(p,p_{N+1})>0\) (resp. \(\psi _-(p,p_{N+1})>0\)) iff \(p_{N+1}>g(p)\) (resp. \(p_{N+1}<g(p)\)).
-
Represent \(\psi _+\) (resp. \(\psi _-\)) with the game \(G_+[p,p_{N+1}]\) using a set of players \(\{\alpha _+\} \cup J_+\) (resp. \(G_-[p,p_{N+1}], \{\alpha _-\} \cup J_-\)). These two games then play in parallel. By Lemma 7.2, the corresponding set of equilibria \(E'(p,p_{N+1})\) of the game in which \(\alpha _+,J_+\) and \(\alpha _-,J_-\) play in parallel is connected.
-
The game \(G'[p]\), which we recalled in the proof of Theorem 3.2— which satisfies, for all \(p \in \mathrm{{dom}}(g)\), \(x^{\alpha _g} = g(p)\) for any equilibrium x of \(G'[p]\)—is then constructed by adding a player \(\alpha _g\) whose payoff depends on his own action, and those of \(\alpha _+,\alpha _-\), and then feeding the action of \(\alpha _g\) back in instead of \(p_{N+1}\), via
$$\begin{aligned} G'^{\alpha _\pm ,J_\pm }[p](z) = G_\pm [p, z^{\alpha _g}](z^{\alpha _\pm ,J_\pm }), \end{aligned}$$that is, \(\{\alpha _+\} \cup J_+\) (resp. \(\{\alpha _-\} \cup J_-\)) still play the game \(G_+[p,p_{N+1}]\) (resp. \(G_-[p,p_{N+1}]\)) but with \(p_{N+1} = z^{\alpha _g}\), and
$$\begin{aligned} G'^{\alpha _g}[p](z) = -z^{\alpha _+} \cdot z^{\alpha _g} -z^{\alpha _-} \cdot (1-z^{\alpha _g}). \end{aligned}$$Denote \(J'_0 = \{ \alpha _+,\alpha _- \} \cup J_+ \cup J_-\), and the total set of players in \(G'[\cdot ]\) by \(J' = \{ \alpha _g \} \cup J'_0\). By construction, in any equilibrium of \(G'[p]\), \(z^{\alpha _g} = g(p)\).Footnote 11 Hence, the equilibria of \(G'[p]\) are \(\{ (x^{\alpha _g},x^{J'_0}) \mid x^{\alpha _g} = g(p), x^{J'_0} \in E'(p,g(p)) \} = \{g(p)\} \times E'(p,g(p))\), which is connected.
-
By direct examination of (3.5) and (3.6), the set of equilibria of \(\tilde{H}[q]\), for any \(q \in \mathbb {R}^2\), are connected. [Indeed, note that for each q, there is a unique equilibrium of the game \(H[q,1 + |q|]\) which appears in the sentence after (3.6).] Another application of Lemma 7.2 then shows that for each \(p \in \mathbb {R}^N\), the set of equilibria of G[p], defined by (3.7) and (3.8), is connected.
\(\square \)
Remark 7.3
A version of Lemma 7.1, and hence of Lemma 7.2, could be proven with ’connected’ being replaced with ’contractible’, and using this one could strengthen the final conclusion of Theorem 7.1: for each \(p \in A\), the set of equilibria of G[p] is contractible. This strengthening can similarly be achieved in Theorem 7.2.
Proof of Theorem 7.2
First, we prove the extension concerning connectedness; we claim that in the proof of Theorem 4.1, for each \(p \in \mathbb {R}^M\) and each connected component C of \(\mathcal{F}\mathcal{P}(f)(p)\), \(\Psi [p](C) = prj^{-1}(C) \cap \mathcal {E}_{T(p)}\) is connected. Define E(p, x) as the set of equilibria of G[p, x]. G, whose players are denoted \(\{ \alpha ^1,\ldots ,\alpha ^K \} \cup J_0\), can be constructed, so that E(p, x) is connected by the above Theorem 7.1. Let \(\Phi (q) = \{ v \in [0,1] \mid (q,v)\textit{ is a Nash equilibrium of} H[q] \}\), which is \(\{q\}\) (resp. [0, 1]) if \(q \in (0,1)\) (resp. \(q \in \{0,1\})\). Fix a component C of \(\mathcal{F}\mathcal{P}(f)(p)\); note that \(C = prj( \Psi [p](C) )\). Then, for \(x = (x_1,\ldots ,x_K) \in C\)
where recall \(x^\alpha = (x^{\alpha _1},\ldots ,x^{\alpha _K})\). Hence, for each \(x \in C = prj( \Psi [p](C) )\), \(prj^{-1}(x) \cap \Psi [p](C)\) is connected. Therefore, \(\Psi [p](C)\) is connected by Lemma 7.1.
Now, we prove the extension concerning the fixed-point index. Let \(||\cdot ||\) be the supremum norm on Euclidean spaces. We begin with three lemmas:
Lemma 7.4
Let \(f:[0,1]^N \rightarrow [0,1]^N\) be continuous, and \(\varepsilon >0\). Then, there is a polynomial \(g:[0,1]^N \rightarrow (0,1)^N\), with \(\sup _{x \in A}|f(x) - g(x)|<\varepsilon \), such that \(\mathcal{F}\mathcal{P}(g)\) is finite and all its points are regular fixed points of g, i.e., for each \(z \in \mathcal{F}\mathcal{P}(g)\), \(I - Dg(z)\) is non-singular, and hence z has fixed-point index \(+1\) or \(-1\).
Proof
Fix \(0<\varepsilon <1\). There is a \(\frac{\varepsilon }{2}\)-uniform approximation of f by a polynomial function \(p(\cdot )\) which also satisfies \(Image(p) \subseteq [\frac{\varepsilon }{4}, 1 - \frac{\varepsilon }{4}]\). Applying Sard’s theorem, there is a constant \(c \in \mathbb {R}^N\) with \(||c|| < \frac{\varepsilon }{4}\) s.t. all fixed points of \(g:=p + c\) are regular. Then, \(||f-g|| < \varepsilon \) and \(Im(g) \subseteq (0,1)^N\), as required.
\(\square \)
Lemma 7.5
Let \(f:[0,1]^N \rightarrow [0,1]^N\), \(N \ge 2\), be a continuous s.a. map, let \(z_1,z_2\) be regular fixed points with indices \(+1\) and \(-1\), respectively. Then, there is a s.a. open neighborhood U of \(z_1,z_2\), with \(\mathcal{F}\mathcal{P}(f) \cap \overline{U} = \{z_1, z_2\}\), and a s.a. homotopy \(H(\cdot ,\cdot ):[0,1] \times [0,1]^N \rightarrow [0,1]^N\) of f to an s.a. function \(g:[0,1]^N \rightarrow [0,1]^N\) s.t. \(\mathcal{F}\mathcal{P}(g) \cap \overline{U} = \emptyset \), and H does not change outside of U, i.e., \(H(t, \cdot )|_{[0,1]^N \backslash U} = f|_{[0,1]^N \backslash U}\) for each \(t \in [0,1]\). A similar conclusion holds for \(N=1\) if there are no fixed points in the interval between \(z_1,z_2\).
Proof
(Sketch) The lemma is known without the assumptions and conclusions of semi-algebracity; e.g., is established as part of the proof of (McLennan [21], Theorem 14.13). An approximation can then be taken using polynomial functions, which can then be smoothed over to guarantee \(H(0, \cdot ) \equiv f\), and then further smoothed to guarantee \(H(t, \cdot )|_{[0,1]^N \backslash U'} = f|_{[0,1]^N \backslash U'}\) for each \(t \in [0,1]\) where \(U' \supseteq U\) is a slightly larger neighbourhood. (In particular, for the last part, one can use a continuous s.a. function \(\phi :[0,1]^N \rightarrow [0,1]\) satisfying \(\phi |_U \equiv 1\) and \(\phi |_{U'} \equiv 0\) for a slightly larger neighbourhood \(U'\) of U, which is guaranteed to exist by the s.a. Urysohn–Tietze extension theorem, e.g., (Bochnak et al. [5], Prop. 2.6.9.)). \(\square \)
The following lemma is a version of s.a. triviality, e.g., (Bochnak et al. [5], Theorem 9.3.2).
Lemma 7.6
Let \(A \subseteq \mathbb {R}^M\) s.a., and F a s.a. correspondence from A to \(\mathbb {R}^K\). Let p denote the projection from \(\mathbb {R}^M \times \mathbb {R}^K \rightarrow \mathbb {R}^M\). Then, there is \(L \in \mathbb {N}\), a finite s.a. partition \(A_1,\ldots ,A_L\) of A, a collection of s.a. sets \(F_1,\ldots ,F_L\) (in some dimensional Euclidean spaces), and a family of homeomorphisms \(\theta _i:A_i \times F_i \rightarrow Gr(F) \cap (A_i \times \mathbb {R}^K)\), s.t. \(p \circ \theta _i\) is the projection mapping \(A_i \times F_i \rightarrow A_i\).
We can now proceed with the proof of Theorem 7.2. As earlier, we will refer to points in the domain of f, and its extension \(\tilde{f}\) below, as parameters for clarify. We will extend f to \(\tilde{f}:\mathcal {D}\times [0,1]^K \rightarrow [0,1]^K\), where \(\mathbb {R}^M \times \{0\} \subseteq \mathcal {D}\subseteq \mathbb {R}^{M+1}\), such that \( \tilde{f}(p,0,y) = f(p,y) \) for \((p,y) \in \mathbb {R}^M \times [0,1]^K\), in such a way that when our construction is applied to \(\tilde{f}\) to derive the associated \(T[\cdot ]\), it will necessarily be that fixed-point index under of a component \(\tilde{f}(p,0,\cdot )\) is equal to the associated fixed-point index of \(\mathcal {E}_{T[p]}\) under a Nash map (see Appendix 9).
Applying Lemma 7.6 to the fixed-point correspondence \(\mathcal{F}\mathcal{P}(f):\mathbb {R}^M \rightarrow [0,1]^K\) to obtain the corresponding trivialization \((A_i, F_i, \theta _i)_{i=1}^L\). W.l.o.g., we can refine the triviality as to assume that each \(A_i\) is connected. For each \(i = 1,\ldots ,L\), fix some \(q^*_i \in A_i\), and let \((F_{i,j})_j\) be the connected components of \(F_i\), where the index j runs over some finite collection; then for each i, j, \(p \in A_i\), \(\theta _i(\{p \} \times F_{i,j})\) is a connected component of \(\mathcal{F}\mathcal{P}(f)(p)\). We will show that the construction can be done is such a way that it is guaranteed that for each \(i=1,\ldots ,L\), and each connected component C of \(\mathcal{F}\mathcal{P}(f(q^*_i,\cdot ))\), the fixed-point indexFootnote 12 of \(\Psi [(q^*_i,0)](C)\) is the same as the fixed-point index of C under \(f(q^*_i,\cdot ) = \tilde{f}((q^*_i,0),\cdot )\); we will later use the continuity properties of the index to show why this gives the conclusion at all parameters in the domain \(\mathbb {R}^M\).

Construction in completion of Proof of Theorem 7.2
For each \(i=1,\ldots ,L\), applying Lemma 7.4, we fix an s.a. function close to \(\tilde{f}((q_i^*,0),\cdot ):= f(q_i^*,\cdot )\), which has only regular fixed points, denoted \(\{ z_{i,j} \}_j\), as j runs over some finite collection, with indices \(\pm 1\); let this function be \(\tilde{f}((q_i^*,1),\cdot )\). Specifically, they should be close enough, such that for each connected component C of \(\mathcal{F}\mathcal{P}(f(q_i^*,\cdot ))\), there is an s.a. neighbourhood U of C s.t. \(\mathcal{F}\mathcal{P}(f(q_i^*,\cdot )) \cap \overline{U} = C\), and an s.a. homotopy between the two functions \(\tilde{f}((q_i^*,0),\cdot )\) and \(\tilde{f}((q_i^*,1),\cdot )\), which introduces no fixed points on \(\partial U\). On the line segment \(\ell _i\) connecting \((q_i^*,0)\) and \((q_i^*,1)\), \(\tilde{f}(\cdot ,\cdot )\) should follow such a homotopy.
Note that for each i, among the points \((z_{i,j})_j\), there is precisely one more point of index \(+1\) than there is of index \(-1\), as the sum of indices must be \(+1\) (see Sect. 9 in the appendix).
Then, choose a collection of parameters \(\{ r_{i,j} \}_j\) near \((q_i^*,1)\), one for each fixed point \(z_{i,j}\) of \(\tilde{f}((q_i^*,1),\cdot )\), such that the line segments connecting \((q_i^*,1)\) to each of the \(r_{i,j}\)— denote each of these lines \(\ell _{i,j}\)— as well as the line segment \(\ell _i\) are all disjoint from each other (save for the parameter \((q_i^*,1)\) itself) and from \(\mathbb {R}^M \times \{0\}\), and such that \(\ell _{i,j}\) is disjoint from \(\ell _{i'}\) and \(\ell _{i',j'}\) for \(i \ne i'\) and any \(j,j'\). See Fig. 9.
Define \(\tilde{f}(r_{i,j},\cdot )\) and \(\tilde{f}(\cdot ,\cdot )\) along \(\ell _{i,j}\) as follows; see Fig. 10.

Idea in the Proof of Theorem 7.2 First perturb \(f(q_i^*, \cdot )\) so that fixed points are isolated, indices \( \pm 1\). For each: If index \(+1\), cancel out others in pairs; if index \(-1\), cancel out with a point of index \(+1\)
-
If \(z_{i,j}\) has index \(-1\), choose some other fixed point \(z_{i,j'}\) with index \(+1\), and let \(\tilde{f}(r_{i,j},\cdot )\) be s.a. and semi-algebraically homotopic to \(\tilde{f}((q_i^*,1),\cdot )\) in such a way that these two fixed points ‘cancel out’, while not changing the function in a neighborhood of the other fixed points, as per Lemma 7.5. (If \(K=1\), \(\tilde{f}((q_i^*,1),\cdot )\) should have not have any other fixed points between \(z_{i,j}\) and \(z_{i,j'}\), which is possible to arrange, as the regular fixed points of \(\tilde{f}((q_i^*,1),\cdot )\) alternate signs.) Let \(\tilde{f}(\cdot ,\cdot )\) follow such a homotopy along \(\ell _{i,j}\).
-
If \(z_{i,j}\) has index \(+1\), let \(\tilde{f}(r_{i,j},\cdot )\) be s.a. and semi-algebraically homotopic to \(\tilde{f}((q_i^*,1),\cdot )\) in such a way that all other fixed points cancel out in \(\pm 1\) pairs, while not changing the function in a neighborhood of \(z_{i,j}\); such exists by repeated application of Lemma 7.5. (When \(K=1\), this, again, is possible by the alternating signs of the fixed points.) Let \(\tilde{f}(\cdot ,\cdot )\) follow such a homotopy along \(\ell _{i,j}\).
Let \(\mathcal {D}\) denote \(\mathbb {R}^M \times \{ 0\}\) together with all the lines \(\ell _i,\ell _{i,j}\); hence, \(\mathrm{{dom}}(\tilde{f}) = \mathcal {D} \times [0,1]^K\). Now, apply the construction of Theorem 4.1 to \(\tilde{f}\) to derive the associated embedding \(T(\cdot ):\mathbb {R}^{M+1} \rightarrow \mathfrak {G}(\overline{K})\) with associated manifold \(\mathcal {E}\) and associated \(\Psi \) as defined in the statement of the theorem; that is, for each \(p \in \mathcal {D}\), \(\mathcal{F}\mathcal{P}(\tilde{f})(p) = prj(\mathcal {E}_{T(p)})\), where henceforth, \(prj:= prj_{\mathbb {R}^{\overline{K}} \rightarrow \mathbb {R}^K}\); as we have already seen in the first part of this extension, it can be guaranteed that for each connected component C of \(\mathcal{F}\mathcal{P}(\tilde{f})(p)\), \(\Psi [p](C)\) is connected, where recall \(\Psi [p](C):= prj^{-1}(C) \cap \mathcal {E}_{T[p]}\) are those points in \(\mathcal {E}_{T[p]}\)—i.e., equilibria of T[p]—which project to C. As mentioned, for each \(q \in \mathcal {D}\) and each component \(C'\) of \(\mathcal {E}_{T[q]}\), \(C'\) has its fixed-point index under a Nash map (see Appendix 9), and it is this index we will refer to.
We make the following observation, which we will apply repeatedly: Suppose \(r',r'' \in \mathcal {D}\), \(C',C''\) are closed (possibly empty) subsets of \(\mathbb {R}^K\), U is an open subset of \(\mathbb {R}^{K}\) s.t. \(\mathcal{F}\mathcal{P}(\tilde{f}(r',\cdot )) \cap U = C'\) and \(\mathcal{F}\mathcal{P}(\tilde{f}(r'',\cdot )) \cap U = C''\), and there is a path \(\ell \) from \(r'\) to \(r''\) s.t. for any \(\hat{r} \in \ell \) (including \(r,r''\)), \(\mathcal{F}\mathcal{P}(\tilde{f}(\hat{r},\cdot )) \cap \partial U = \emptyset \). It follows from the continuity of the fixed-point index (applied once to \(\tilde{f}\) and once to the Nash map) that the fixed-point indices of \(C'\) under \(\tilde{f}(r',\cdot )\), and of \(C''\) under \(\tilde{f}(r'',\cdot )\), are equal, and the fixed-point indices of \(\Psi [r'](C')\) and \(\Psi [r''](C'')\) under a Nash map are equal. (For the latter conclusion, note that \(V:= prj^{-1}(U)\) satisfies \(V \cap \mathcal {E}_{T(r')} = \Psi [r'](C')\), \(V \cap \mathcal {E}_{T(r'')} = \Psi [r'](C'')\), so for any \(\hat{r} \in \ell \), since \(\mathcal{F}\mathcal{P}(\tilde{f}(\hat{r},\cdot )) \cap \partial U = \emptyset \), \(\partial V \cap \mathcal {E}_{T[\hat{r}]} \subseteq prj^{-1}(\partial U) \cap \Psi [\hat{r}](\mathbb {R}^K \backslash \partial U)= \emptyset \).)
We claim that, for each \(i=1,\ldots ,L\), the fixed-point index of a component C of \(\mathcal{F}\mathcal{P}(f(q_i^*,\cdot )) = \mathcal{F}\mathcal{P}(\tilde{f}((q_i^*,0),\cdot ))\) under \(f(q_i^*,\cdot )\) must be equal to the fixed-point index of \(\Psi [(q_i^*,0)](C)\) under a Nash map:
-
For each i, j such that \(z_{i,j}\) has fixed-points index \(+1\), the mapping \(\tilde{f}(r_{i,j},\cdot )\) has \(z_{i,j}\) as a unique fixed point, and hence the associated component of \(\mathcal {E}_{T(r_{i,j})}\), \(\Psi [r_{i,j}](z_{i,j})\), is simply all of \(\mathcal {E}_{T(r_{i,j})}\), which must then also have index \(+1\) under a Nash map; by following the relevant homotopy back along \(\ell _{i,j}\), we see that \(\Psi [(q^*_i,1)](z_{i,j})\) has index \(+1\) under the Nash map.
-
For each i, j such that \(z_{i,j}\) has fixed-points index \(-1\), the mapping \(\tilde{f}(r_{i,j},\cdot )\) has no fixed points in some neighbourhood of \(\{ z_{i,j}, z_{i,j'} \}\) for some other \(j'\) paired to it above, with \( z_{i,j'}\) having fixed-point index \(+1\). Again, following the homotopy back along \(\ell _{i,j}\), we similarly see that \(\Psi [(q^*_i,1)](\{ z_{i,j}, z_{i,j'} \})\) has index 0 under the Nash map. However, by the previous step, \(\Psi [(q^*_i,1)](z_{i,j'})\) has index \(+1\) under the Nash map, and hence, \(\Psi [(q^*_i,1)](z_{i,j})\) has index \(-1\).
-
Hence, we see that for each fixed point \(z \in \mathcal{F}\mathcal{P}(\tilde{f}( (q_i^*, 1), \cdot ))\), the fixed-point index of z under \(\tilde{f}( (q_i^*, 1), \cdot )\) is equal to the fixed-point index of \(\Psi [(q^*_i,1)](z)\) under the Nash map.
-
Fix a connected component C of \(\mathcal{F}\mathcal{P}(\tilde{f}((q_i^*,0),\cdot ))\). Since the homotopy from \(\tilde{f}((q_i^*,0),\cdot )\) to \(\tilde{f}((q_i^*,1),\cdot )\) has a neighborhood U of C s.t. \(\mathcal{F}\mathcal{P}(\tilde{f}((q_i^*,0),\cdot )) \cap U = C\), \(\mathcal{F}\mathcal{P}(\tilde{f}((q_i^*,1),\cdot )) \cap U = (z_{i,j})_j\), and s.t. the homotopy along \(\ell _i\) has no fixed points on \(\partial U\), we see that
$$\begin{aligned} \text {The fixed-}&\text {point index of }C\text { under } f(q_i^*,\cdot ) \\&= \text {The fixed-}\text {point index of }C\text { under } \tilde{f}((q_i^*,0),\cdot ) \\&= \text {The fixed-point index of }(z_{i,j})_j\text { under } \tilde{f}((q_i^*,1),\cdot ) \\&= \sum _{z \in (z_{i,j})_j} \text {The fixed-point index of }z\text { under } \tilde{f}((q_i^*,1),\cdot ) \\&= \sum _{z \in (z_{i,j})_j} \text {The fixed-point index of }\Psi [(q^*_i,1)](z)\text { under a Nash map} \\&= \text {The fixed-point index of }\Psi [(q^*_i,1)]((z_{i,j})_j)\text { under a Nash map} \\&= \text {The fixed-point index of }\Psi [(q^*_i,0)](C)\text { under a Nash map}, \end{aligned}$$as required.
-
Finally, going back to the s.a. trivialization, we need to show that for each \(i = 1,\ldots ,L\) and each j, the fixed-point index of \(\theta _i(p,F_{i,j})\) under \(f(p,\cdot )\) is constant over \(p \in A_i\), and similarly that the fixed-point index under a Nash map of \(\Psi [(p,0)](\theta _i(p,F_{i,j}))\) is constant over \(p \in A_i\); it suffices to show they are locally constant, as each \(A_i\) is connected. Indeed, fixing \(p_0 \in A_i\) and letting \(U \subseteq \mathbb {R}^K\) be any neighbourhood of \(\theta _i(p_0,F_{i,j})\) s.t. \(U \cap \mathcal{F}\mathcal{P}(f(p_0,\cdot )) = \theta _i(p_0,F_{i,j})\), we see that for p close enough to \(p_0\), \(U \cap \mathcal{F}\mathcal{P}(f(p,\cdot )) = \theta _i(p,F_{i,j})\) and \(\partial U \cap \mathcal{F}\mathcal{P}(f(p,\cdot )) = \emptyset \), as well. Hence, the conclusion follows our above observation.
Hence, finally, we see that the embedding \(\mathbb {R}^M \rightarrow \mathfrak {G}(\overline{K})\) we seek in the theorem is given by restricting the domain of T to \(\mathbb {R}^M \times \{0\} \sim \mathbb {R}^M\). \(\square \)
Data Availability
Slicing the Nash equilibrium manifold, by Yehuda John Levy, at Journal of Fixed Point Theory & Applications: We do not analyse or generate any datasets, because our work proceeds within a theoretical and mathematical approach.
Notes
More precisely, the given set is \(\subseteq [0,1]^N\) for some N, the game has binary (i.e., two-action) players, and hence, each agent’s mixed actions are identified with [0, 1].
A ring is an algebraic structure with operations of addition and multiplication satisfying certain axioms; we will not need to make use of the specific axioms, which can be found in any introductory text on abstract algebra.
An embedding is a continuous map, which is a homeomorphism with its image. The notion of homotopy is valid also when f, g are merely continuous.
Note that \((t,x) \rightarrow F(t,f(x))\) is an isotopy from f to g.
Indeed, \(0.25 \le 1.25 - 1.5 p \le 0.75\) iff \(\frac{1}{3} \le p \le \frac{2}{3}\), and for such p
$$\begin{aligned} f(p, 1.25 - 1.5 p)= 0.3 \cdot p + \frac{6}{5}(1.25 - 1.5 p ) - 0.25 = 1.25 - 1.5 p \end{aligned}$$.
We denote T(p) instead of T[p] here, as we are abstracting away from games, so do not refer to action profiles.
Special thanks to Andre Veiga for help with this figure, created in Matlab.
We do use the notion of the fixed-point later in this paper, but only for extensions of our results, which are presented in Sect. 7; it is not used before that section.
Following Theorem 4.1, \(prj:= prj_{\mathbb {R}^{\overline{K}} \rightarrow \mathbb {R}^K}\).
Indeed, as elaborated in Levy [18], if \(z^{\alpha _g} > g(p)\), \(z^{\alpha _-} = 0 < z^{\alpha _+}\), and hence, \(\alpha _g\) would choose \(0\le g(p)\), a contradiction; and similarly we cannot have \(z^{\alpha _g} < g(p)\).
By the part of the extension already established, the construction can be done, so that \(\Psi [(q^*_i,0)](C)\) is connected for each connected component C of \(\mathcal{F}\mathcal{P}(f(q^*_i,\cdot ))\).
This generalizes to more general Hausdorff topological spaces, see, e.g., the latter given reference.
Since a proof there is not given, we provide one here: If not, suppose \(K_n \rightarrow K\) in \(\mathcal {K}(X)\) with each \(K_n\) connected but K not. There are disjoint open U, V with \(K \subseteq U \cup V\), \(K \cap U \ne \emptyset \) and \(K \cap V \ne \emptyset \). Hence, \(K_n \subseteq U \cup V\), \(K_n \cap U \ne \emptyset \) and \(K_n \cap V \ne \emptyset \) for large enough n, a contradiction, since, by assumption, each \(K_n\) is connected.
This is a result of our focus on convex X.
References
Aliprantis, C., Border, K.: Infinite Dimensional Analysis: A Hitchhiker’s Guide. Springer, Berlin (2006)
Balkenborg, D., Vermeulen, D.: On the topology of the set of nash equilibria. Games Econ. Behav. 118, 1–6 (2019)
Blume, L., Zame, W.: The algebraic geometry of competitive equilibrium: in memorium trout rader. In: Neuefeind, W. (ed.) Essays in General Equilibrium and International Trade, pp. 53–66. Springer, New York (1993)
Blume, L., Zame, W.: The algebraic geometry of perfect and sequential equilibrium. Econometrica 62, 783–794 (1994)
Bochnak, J., Coste, M., Roy, M.-F.: Géométrie Algébrique Réelle. Springer, New York (1987)
Border, K.: Fixed Point Theorems with Applications to Economics and Game Theory. Cambridge University Press, Cambridge (1985)
Browder, F.: On continuity of fixed points under deformation of continuous mappings. Summa Bras. Math. 4, 183–191 (1960)
Datta, R.S.: Universality of nash equilibria. Math. Oper. Res. 28(3), 424–432 (2003)
Demichelis, S., Germano, F.: On the indices of zeros of Nash fields. J. Econ. Theory 94, 192–217 (2000)
Demichelis, S., Germano, F.: On (un)knots and dynamics in games. Games Econ. Behav. 41(1), 46–60 (2002)
Dries, L.P.D.: Tame Topology and O-minimal Structures. London Mathematical Society Lecture Note Series. Cambridge University Press, Cambridge (1998)
Govindan, S., Wilson, R.: Uniqueness of the index for nash equilibria of finite games (1998) (Unpublished manuscript)
Govindan, S., Wilson, R.: Essential equilibria. Proc. Natl. Acad. Sci. 102(43), 15706–15711 (2005)
Harsanyi, J.: The tracing procedure: a Bayesian approach to defining a solution for \(n\)-person noncooperative games. Int. J. Game Theory 4, 61–95 (1975)
Herings, P.J.-J., Peeters, R.: Homotopy methods to compute equilibria in game theory. Econ. Theory 42(1), 119–156 (2010)
Kohlberg, E., Mertens, J.-F.: On the strategic stability of equilibria. Econometrica 54, 1003–1038 (1986)
Laraki, R., Pahl, L., Govindan, S.: O’neill’s theorem for games. Working paper (2022)
Levy, Y.J.: Projections and functions of nash equilibria. Int. J. Game Theory 45(1), 435–459 (2016)
Mas-Colell, A.: A note on a theorem of F. Browder. Math. Program. 6, 229–233 (1974)
McLennan, A.: Fixed points of parameterized perturbations. J. Math. Econ. 55, 186–189 (2014)
McLennan, A.: Advanced Fixed Point Theory for Economics. Springer, Singapore (2018)
Michael, E.: Topologies on spaces of subsets. Trans. Am. Math. Soc. 71, 152–182 (1951)
Munkres, J.: Topology. Featured Titles for Topology. Prentice Hall, Incorporated, Hoboken (2000)
Nash, J.: Non-cooperative games. Ann. Math. 54, 286–295 (1951)
Neyman, A., Sorin, S.: Stochastic Games and Applications. NATO Science Series: Mathematical and Physical Sciences. Springer, Amsterdam (2003)
Schanuel, S., Simon, L., Zame, W.: The algebraic geometry of games and the tracing procedure. In: Selten, R. (ed.) Game Equilibrium Models, II: Methods, Morals and Markets, pp. 9–44. Springer, Berlin (1991)
Solan, E., Solan, O. N.: Browder’s theorem through brouwer’s fixed point theorem. Am. Math. Mon. (2021). https://doi.org/10.1080/00029890.2022.2160170
Solan, E., Solan, O.N.: Sunspot equilibrium in positive recursive general quitting games. Int. J. Game Theory 50(4), 891–909 (2021)
Solan, E., Solan, O.N.: Browder’s theorem: from one-dimensional parameter space to general parameter space (2022). arXiv:2210.16369
Solan, E., Solan, O.N.: Browder’s theorem with general parameter space. J. Fixed Point Theory Appl. 24(1), 1–8 (2022)
Vigeral, G.: A characterization of sets of equilibrium payoffs of finite games with at least 3 players. Manuscript in preparation (2022)
Vigeral, G., Viossat, Y.: Semi-algebraic sets and equilibria of binary games. Oper. Res. Lett. 44, 19–24 (2016)
Author information
Authors and Affiliations
Contributions
This is sole author paper.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The author is grateful to Lucas Pahl and Eilon Solan, for their proofreading and feedback.
Appendices
Appendix: Vietoris topology
The reader is referred to, e.g., (Aliprantis and Border [1], Ch. 3) or (McLennan [21], Ch. 4) for a more complete treatment. Let X be a metrizable space,Footnote 13 let d be a metric on X, and let \(\mathcal {K} = \mathcal {K}(X)\) denote the collection of non-empty compact subsets on X. For \(K \in \mathcal {K}\), \(x \in X\)
and for \(K_1,K_2 \in \mathcal {K}\)
\(\rho \) can be shown to be a metric, the Hausdorff metric, which defines the Vietoris topology on \(\mathcal {K}\). It can be shown that:
-
The induced topology on \(\mathcal {K}\) is independent of the metric d chosen on X.
-
If X is compact, then so is \(\mathcal {K}\).
It also follows from the definition that if \(K_n \rightarrow K\) in \(\mathcal {K}\), then for every open neighborhood U of K, it holds for n large enough that \(K_n \subseteq U\), and for every open set V with \(K \cap V \ne \emptyset \), it holds for n large enough that \(K_n \cap V \ne \emptyset \). The following is (Michael [22], Prop. 4.13.5)Footnote 14:
Lemma 8.1
The collection in \(\mathcal {K}\) of connected sets is closed in the Vietoris topology.
The following is (McLennan [21], Lemma 4.12):
Lemma 8.2
Let X, Y be metrizable spaces, and \(f:X \rightarrow Y\) continuous. Then, the induced map \(f_*:\mathcal {K}(X) \rightarrow \mathcal {K}(Y)\) is continuous.
Appendix: The fixed-point index and Nash maps
For a thorough treatment on the fixed-point index, see, e.g., (McLennan [21], Ch. 13), and on Nash maps, see, e.g., Govindan and Wilson [13]; we have only brought here the minimal machinery needed.
We begin with a heuristic explanation. For a continuously differentiable map \(f:U \rightarrow \mathbb {R}^N\), \(U \subseteq \mathbb {R}^N\), we define the displacement map to be \(id-f\); clearly, the fixed points of f are precisely the inverse image of 0 under the displacement map. At an isolated fixed point z of f, if the derivative of the displacement map is non-singular, we say that the fixed point is regular, and we assign to z index \(+1\) (resp. \(-1\)) if the displacement map is orientation preserving (resp. reversing) at z, i.e., if \(\mathrm{{det}}(I-df(x))>0\) (resp. \(<0\)). For any subset V of U (with no fixed points of f on the boundary \(\partial V\)), whose fixed points are all regular, we would like the index of f in V to be sum over all indices of the fixed points in V. It follows that if the function changes slightly, then for any such open \(V \subseteq U\), the index of f in V should not change, assuming the change is small enough, so that no fixed points are created on \(\partial V\).
In the case that the fixed points of f are not isolated and regular, we would like to define the fixed-point index of a component of \(\mathcal{F}\mathcal{P}(f)\), by saying that we should perturb f to a nearby function g whose fixed points are all regular. One must show that this definition would be independent of the specific perturbation used (at least one such \(\varepsilon \)-perturbation exists for each \(\varepsilon >0\) by Sard’s theorem). Built on these heuristic properties, and properties that can be derived from this approach, an axiomatic approach to the index can be described, which generalizes to more general spaces; for our purposes, spaces such as simplices, or not much more imaginative than that, suffice.
To formalize: Let X be a compact convex subset in a Euclidean space. For each compact \(C \subseteq X\), let \(\mathcal {F}^X_C\) be the collection of continuous functions \(C \rightarrow X\) with no fixed points on the boundary \(\partial C\) (where boundary and interior refer to the relative boundary and interior in X), and let \(\mathcal {F}^X = \underset{C \subseteq X \text { compact}}{\bigcup } \mathcal {F}^X_C\); such functions are index admissible. Then (McLennan [21], Theorem 13.4), there is a unique function \(\Lambda :\mathcal {F}^X \rightarrow \mathbb {Z}\) which satisfies:
-
(Normalization) If \(c:C \rightarrow X\) is a constant function, whose image is in the interior int(C), then \(\Lambda (c)=1\).
-
(Additivity) If \(f:C \rightarrow X\) is an element of \(\mathcal {F}^X\), \(C_1,\ldots ,C_r\) are compact disjoint subsets of C, and \(\mathcal{F}\mathcal{P}(f) \subseteq \cup _{i=1}^r int(C_i)\), then
$$\begin{aligned} \Lambda (f) = \sum _{i=1}^r \Lambda (f|_{C_i}). \end{aligned}$$ -
(Continuity) For each compact \(C \subseteq X\), \(\Lambda \) is continuous on \(C(C,X) \cap \mathcal {F}^X\), where C(C, X) is the space of continuous functions from C to X with maximum norm.
A few immediate properties:
-
The index remains constant under homotopy, as long as no fixed points appear on \(\partial C\) throughout.
-
\(\Lambda (f) = 1\) for \(f \in \mathcal {F}^X_X\).Footnote 15
-
If \(f \in \mathcal {F}_C^X\) has no fixed points, \(\Lambda (f|_C)=0\).
-
For a connected component C of \(\mathcal{F}\mathcal{P}(f)\), if U, V are any two neighbourhoods of C with \(\mathcal{F}\mathcal{P}(f) \cap \overline{U} = \mathcal{F}\mathcal{P}(f) \cap \overline{V} = C\), then \(\Lambda (f|_{\overline{U}}) = \Lambda (f|_{\overline{V}})\); this is the fixed points index of C under f.
For a regular fixed point z in the interior (relative to the ambient Euclidean space) of X, the fixed-point index coincides with the heuristic notion above: the sign of the determinant of the derivative of the displacement map.
The axiomatization also extends to correspondences, (McLennan [21], Sec. 13.5); this extension is relevant to the generalizations mentioned in Remark 3.1.
1.1 Nash maps
Now, fix a set of players N with finite action spaces \(A^1,\ldots ,A^N\), denote the space of games with these players as space of games \(\mathfrak {G}\), and denote the space of mixed-action profiles \(\Sigma \). A Nash map is a continuous function \(\phi :\mathfrak {G}\times \Sigma \rightarrow \Sigma \), s.t. for each \(G \in \mathfrak {G}\), \(\mathcal{F}\mathcal{P}(\phi (G,\cdot )) = NE(G)\). For \(G \in \mathfrak {G}\), the index of a connected component C of Nash equilibria is the fixed-point index of C under the map \(\phi (G,\cdot )\). It can be shown that this definition is independent of the particular Nash map being used ([10] or [9], also [12]).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Levy, Y.J. Slicing the Nash equilibrium manifold. J. Fixed Point Theory Appl. 25, 85 (2023). https://doi.org/10.1007/s11784-023-01088-2
Accepted:
Published:
DOI: https://doi.org/10.1007/s11784-023-01088-2