
Abstract
Containerless measurements of the thermophysical properties density, viscosity, and self-diffusion by electromagnetic- (EML) and electrostatic levitation (ESL) are compared. The development history of the two techniques is briefly traced. The levitation principles and the measurement techniques for the properties considered are discussed. In the case of the density, data measured by both techniques are available for a liquid NiTi alloy. The results agree within a systematic error of ± 1 %. The data measured in EML exhibit a significant larger scatter. Viscosity data cannot be measured in ground-based electromagnetic levitation, so the comparison is carried out for a NiB alloy investigated in ESL and a classical viscometer. Good agreement was found as well. No significant difference is observed in self-diffusion data of various systems between different levitation techniques.
Similar content being viewed by others


1 Introduction
Thermophysical properties of liquid melts are crucially important for process design, layout, and optimization, as well as for a fundamental understanding of materials science [1]. The latter is essential for computer-aided materials design and optimization. The importance of the liquid phase becomes impressively clear in view of the fact that more than 70 % of all materials are produced under direct involvement of the melt [2]. This includes processes such as casting, welding, soldering, or melting in powder-based 3D laser printing [3].
Despite successful research carried out on thermophysical properties and progress made during the past 20 years, systematic data on liquid multicomponent melts is still sparse. One reason is the high chemical reactivity of liquid metals and ionic liquids at elevated temperature. Thus, in standard container-based techniques, a specimen at high temperature is polluted and changes composition due to chemical reactions with the substrate- or crucible material being in contact with. Consequently, the investigation of such materials with conventional, container-based techniques renders a difficult task, often leading to erroneous results.
Containerless techniques offer an elegant way to bypass this problem [4,5,6,7,8,9]. They have become indispensable for the investigation of liquid metals and other high temperature melts. Containerless techniques offer the additional advantage that liquids can deeply be undercooled and investigated in this otherwise inaccessible temperature range.
At the current point in time, the following levitation techniques are mainly used: aerodynamic levitation (ADL), [4,5,6] electrostatic levitation (ESL) [7], and electromagnetic levitation (EML) [8]. In ADL, the sample is levitated on a gas-stream. In ESL, the sample is electrically charged and positioned by the electrostatic forces in a static electrical field. In ADL, as well as in ESL, heating of the sample is accomplished by an infrared (IR-) laser. In EML, the sample is positioned against gravity by Lorentz-forces. Heating takes place inductively. While ADL has become standard for the investigation of liquid oxides, ESL as a versatile and comparatively new platform is well suited for high-temperature refractory materials with low work function, so that thermionic emission prevents charge loss at high temperature. “Work function” is the minimum thermal energy required to move an electron from a bound state inside the material to the vacuum level. In metals, it equals the binding energy of an electron at the Fermi-edge.
As oxide materials are not considered in the present work, the following sections will deal with EML and ESL only.
EML and ESL provide an environment for the contactless measurements on liquid metals and alloys at high temperature and deep undercooling. Chemically highly reactive materials, that are otherwise not accessible, can be processed and investigated, even at high temperature.
In order to exploit this environment for the measurement of thermophysical properties, EML and ESL must be combined with contactless diagnostic tools for the corresponding measurements. It is obvious that the development and integration of these tools is the major challenge in this field. They are mostly based on optical methods (videometry, spectroscopy) or, sometimes, also on inductive methods.
1.1 Electromagnetic Levitation
Electromagnetic levitation (EML) as a technique for investigation has been available since more than 70 years. The concept of EML was proposed in a patent by Muck in 1923 [10]. Nearly 30 years later, in 1952, a research group at Westinghouse company proposed to use EML as a preparation technique for the commercial production of extremely pure metals [11]. Although this expectation was not fulfilled, it was recognized that EML has an enormous potential as a measurement technique. Ten years later, in 1964, Rony and Fromm [12, 13] provided a detailed theory of electromagnetic levitation which included an analysis of the acting forces, heat absorption, coil geometry, field strengths, and necessary frequency ranges. They also discussed the applicability of EML to nearly all metallic elements of the periodic table.
Ground-based thermophysical property measurements were then performed by a number of groups. El-Mehairy [14] and Shiraishi [15] published the first, preliminary density data measured on a number of transition metals.
During the 1990’s, Krishnan measured spectral emissivity and other optical properties for a number of liquid pure metals and alloys by combining an electromagnetic levitator with an ellipsometer [16,17,18,19].
Brooks [20], Egry [21,22,23,24], and others successively enlarged the spectrum of properties that can be measured with ground-based EML. A comprehensive overview on recent activities is given in the review by Brillo et al. [8] as well as in Ref. [3, 9].
Parallel to the development of EML on ground, activities began aiming to perform electromagnetic levitation experiments under microgravity [25]. In contrast to ground-based electromagnetic levitation, microgravity offers a number of advantages which are related to the significant reduction of the electromagnetic positioning field. Since 1987, a parabolic flight is carried out usually once per year with the EML facility “TEMPUS” on board. In the parabolic flight environment, 30 parabolas are flown per day, organized into blocks of five parabolas, each providing a microgravity time of approximately 20 s and a quality of the order of 10–2 g. From 2004 to 2008, TEMPUS experiments were also performed using the European sounding rocket program TEXUS/MAXUS. Here, the total microgravity time is 6 min for TEXUS and 12 min for MAXUS. Usually, the time is shared between two experiments. The microgravity quality is of the order of 10–4 g–10–5 g [26].
Experiments were also carried out in outer space where a true micro-g environment exists. In 1994 [27] and 1997, EML flew on two Spacelab missions, and since 2014 there is a permanent EML facility installed onboard the Columbus module of the International Space Station ISS [26]. The experiments are organized in the so-called batches consisting of a set of 18 samples. The experiments are carried out at night when the astronauts sleep in order to minimize the g-jitter. The quality of the microgravity thus achieved is of the order of 10–5–10−6 g.
1.2 Electrostatic Levitation
The concept of electrostatic levitation dates back to before 1977 when development of containerless processing techniques was funded by the European Space Agency ESA. In these early days, Clancy and Lierke at Batelle Institute in Frankfurt [28,29,30,31] developed an electrostatic positioner. The device was aimed for processing under vacuum conditions and at temperatures up to 1500 °C which they achieved by a mirror furnace. Unlike in modern electrostatic levitation, the sample was electrically neutral. The sample was dielectrically polarized by an electrical field. The latter was generated by four tetrahedrally arranged electrodes to which a voltage of approximately 10 kV was applied. As the resulting forces were too weak for levitation against gravity, the positioner was intended to be used under microgravity. The first experiment was conducted on a sounding rocket flight in 1988 with an improved version which included the use of electrostatic positioning and optical cameras [31].
During the 1980’s and 1990’s, NASA’s Jet Propulsion Laboratory (JPL) carried out a systematic development of the electrostatic levitation technique testing different technology demonstrators with different electrode configurations [32, 33]. These devices could already be used on ground. Assuming a pair of horizontal electrodes, the condition mg = (U/d)qe had to be satisfied for stable levitation where m is the mass of the sample with charge qe, U is the voltage between the electrodes, and d is their distance. Typical experimental values were qe = 4 × 10–9 C, m = 0.1 g, U = 15 kV, and d = 1.2 cm. A circular convex top electrode and a matching concave bottom electrode were used to generate a lateral restoring component of the overall force which includes the vertical lifting force.
Due to Earnshaw’s theorem, a potential minimum cannot be established with electrostatic forces. Therefore, active position control is needed [34].
Modern Electrostatic Levitators have been available since 1993 [7, 29]. Besides activities at Japanese Aerospace Center (JAXA) [7], activities in the field of electrostatic levitation also started at German Aerospace Center (DLR) before 2000 [35].
Today, one can observe an increased use of electrostatic levitation. The technique is used by groups in the US [36], in Japan [7], in South-Korea [37], in Germany [38], and in China [39]. Since 2014, there is also an electrostatic positioner on board the international space station ISS [40]. Reasons for its success are that a broad range of properties can be measured and that there are no principle restrictions regarding the materials class. Every material can be processed that can electrically be charged, i.e., metals, ionic liquids and solutions, as well as semiconductors.
2 Techniques
2.1 EML
The principle of EML is based on the induction law, Lenz’ rule, and the Lorentz force law. When an electrically conducting material experiences an external magnetic field B that changes in time, i.e., an AC magnetic field, eddy currents are induced within. These eddy currents produce a Lorentz force F vertical to the generating magnetic field lines. With a suitable choice of the coil geometry, the sample can stably be positioned, even against gravity. Simultaneously, the induced eddy currents heat and melt the sample.
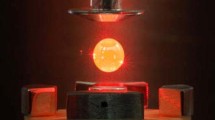
A photograph of a typical arrangement of a coil-sample-system is shown in Fig. 1. A liquid droplet levitates in the center of a water-cooled coil (≈ 1 µH) to which a current of approximately 200 A is applied. The frequency is in the range between 200 and 300 kHz. These parameters correspond to a power of roughly 2 kW–10 kW, 98 % of which is dissipated into the cooling water of the coil. The top winding has opposite polarity so that B2 has a minimum in the coil center, see Fig. 1.

Photograph of a levitated liquid Cu sample at ≈ 1600 K. The back-light illumination is clearly visible on the righthand side, as well as the shadow of the sample backscattered on the chamber window on the left-hand side. The magnetic field is illustrated by the white lines (Color figure online)
The Lorentz force F acting on the sample is given by the following expression [12]:
In Eq. 1, µ0 is the magnetic permeability in vacuum, a is the radius of the sample with an assumed spherical shape, and q = r/δ is a dimensionless quantity with \(\delta =\sqrt{2/({\mu }_{0}{\sigma }_{el}{\omega }_{mag})}\) being the skin-depth. \({\omega }_{mag}\) is the frequency of the magnetic field and \({\sigma }_{el}\) denotes the electrical conductivity. The effect of the skin-depth is taken into account by the analytical function Q(q):
As a necessary condition for levitation, the vertical component of F must compensate the weight of the sample. When ρ is the density of the sample, g its gravitational acceleration, and V the volume, Eq. 1 becomes [12]:
It should be noted that the levitation condition does not depend on the mass of the sample but rather on the density. Samples with low densities are easier to levitate. The other main factor is \(-\nabla {B}^{2}\) with which the force scales. The minus sign hereby takes Lenz’ rule into account and the F is always directed away from B, i.e., toward the center of the coil where B2 is minimum. As a consequence, there is a restoring force for sample displacement, so that electromagnetic levitation is intrinsically stable and no active position control is needed.
As the sample has finite electrical conductivity, the induced eddy currents experience ohmic losses so that Joule heating takes place with a power P [12]:
where H(q) plays a similar role as Q(q) in Eq. 1. It takes the effect of the skin-depth into account and may be interpreted as an effective efficiency factor for heating.
The right side of Eq. 4 consists of a product of the power density, B2ω/(2µ0) and the volume of the sample. Due to the skin effect, the latter is effectively reduced by the factor H(q) which is given by the following analytical function, already proposed by Rony [12]:
Heating and positioning are governed by the functions Q(q) and H(q) according to Eqs. (2) and (5), respectively.
In order to discuss the positioning-heating relation in ground-based electromagnetic levitation, Eqs. (2) and (5) are plotted in Fig. 2 versus q.

Both functions are zero for q = 0 which corresponds to a perfect insulator or to ω = 0. Currents can thus not be induced and neither positioning nor heating occurs. On the other hand, for q → ∞, Q(q) > 0 but H(q) = 0. So, for a perfect conductor, levitation takes place but there is no heating. Experimentally, it can sometimes be observed that very good electrical conductors, such as aluminum, copper, or gold, levitate very stably, because of the high positioning force. However, their temperature may rise slowly making it difficult to reach the targeted temperature at all. In contrast, samples with a lower conductivity, i.e., certain alloys or some semiconductors, exhibit opposite behavior: They may too quickly heat up and melt already on the sample holder before the levitation force is sufficiently large. Variation of the sample volume as well as changing the kind of the processing gas may enable a quick solution.
At moderate values of q, the ratio between heating and positioning can be adjusted, within the limits, by changing the frequency and the power of the electromagnetic field, the volume of the sample, or by changing \(\nabla {B}^{2}\) through alternative coil geometry. As a compromise between heating and positioning, one may adjust the system around q-values of roughly 3.3 as marked by the vertical arrow in Fig. 2.
In typical ground-based EML setup, the coil system is placed inside a high vacuum chamber. In order to remove gaseous impurities such as water, hydrogen, O2, CO, CO2, N2, NO, NOx, hydrocarbons, and others, the chamber is evacuated prior to each experiment to a base pressure of typically 10–6–10–8 mbar. In order to avoid or reduce sample evaporation, the levitation experiments are carried out under protecting atmospheres such as 500–900 mbar of Ar or He having purities of at least 6N. In order to reduce persistent oxygen impurities, 5–8 vol% of H2 is sometimes added.
At the beginning of each experiment, the sample is placed on top of a vertical ceramic tube located inside the induction coil. A photograph of the setup is shown in Fig. 1. Typical coil dimensions are 40 × 15 mm. The sample radius is roughly 5 mm corresponding to a mass of 0.5–1.5 g. The generator power is slowly increased; when the sample begins to levitate, the tube can be removed. Temperatures far above the respective melting points are accessible and extreme temperatures of 2000–4000 K were achieved already [8]. Deep undercoolings of up to 300 K are also not unusual [9]. As a big advantage, reactive metals can be processed, even at high temperature or deep undercooling.
In ground-based EML, positioning and heating are not decoupled. Temperature is best adjusted by counter cooling of the specimen. To this end, the sample is exposed to a weak laminar flow of the processing gas, i.e., Ar or He, admitted via one or several small nozzles.
The shape of the sample deviates from that of a sphere [41, 42]. It is flat at the top and elongated at the bottom, see Fig. 1. This phenomenon can only partly be explained by the geometry of the magnetic field of the cylindrically symmetric coil. In fact, fluid flow inside the sample plays a key role [43, 44].
The (magneto-hydrodynamic) fluid flow is driven by the Lorentz force necessary to lift the sample against gravity. It is turbulent in ground-based EML experiments under the correct conditions [41,42,43,44]. A turbulent flow inside the sample may have some homogenizing effect on temperature and composition. However, under unfavorable conditions, it can sometimes cause heavy sample movements like vivid translational- or surface oscillations, or fast rotations around any axis [45, 46]. These instabilities are only limited by energy dissipation due to shear forces. They may become so intense that accurate measurements are no longer possible.
The strong magnetic levitation field also leads to a strong damping of the surface oscillations. Together with energy consumption by the turbulent flow, the measurement of the viscosity is not possible under terrestrial conditions [47]. Electromagnetic levitation has also a number of advantages: It is intrinsically stable. Active position control is not needed. EML is tolerant to ambient conditions and a large variety of different materials may be processed. The turbulent flow also excites spontaneous surface oscillations which is very convenient for surface tension measurements. The method allows access to high temperatures, to broad temperature ranges, and deep undercoolings. It allows to process highly reactive materials and is, at the present, still the most suitable and indicated technique for the investigation of electrically conductive materials, such as liquid metals, alloys, or even semiconductors, such as Si or Ge [48, 49].
2.2 ESL
The technique of electrostatic levitation is described in great detail in the review article by Paradis et al. [7]. The sample and electrode system are arranged inside an ultra-high vacuum (UHV-) chamber. The chamber can be evacuated by a pumping system down to pressure in the 10–8 mbar range. Processing is performed under vacuum or sometimes under a dedicated atmosphere, consisting of air, Ar, He, etc.
In order to control the sample position, the specimen is illuminated by two crossed expanded positioning laser beams (630 nm). Their shadows are captured by two 2-dimensional (2D)-position sensitive Si-photo detectors (PSD). The corresponding signals allow for a full 3D positioning control in a feedback loop adjusting the high voltages (4–20 kV) at the individual electrodes on a millisecond timescale.
The feedback loop uses either a PID controller [32, 33, 50] or a sophisticated real-time control system resilient to sudden changes in position [35, 51].
In conducting materials, like metals, levitation is initiated by capacity charging [7]: When the sample is located at the bottom electrode and a negative potential is applied to the top electrode, the specimen becomes positively charged and starts to levitate. Alternative ways to initiate levitation involve a small rod on which the sample with a bore is located initially or a syringe by which the already liquid sample is introduced into the field [37].
Heating in electrostatic levitation is independent of positioning and accomplished by an IR-laser (25 W–100 W) directed at the sample. In order to reduce a temperature gradient and associated Marangoni flow, there are also experiment designs where the sample is preferably iso-tropically heated by several IR-lasers arranged uniformly around the sample [52].
Charge loss poses a significant challenge to the processing. Charge is lost either by evaporation of atoms of sample material or impurities which carry the charge with them or by contact with the atmosphere or residual gasses [7]. In order to compensate for the charge loss, UV light (Deuterium I, II or a UV-laser) radiates the sample and the photo-electron emission process positively recharges the samples [7]. However, due to the lack of electrical grounding, the photo-emission process is hampered by the field-effect of the charge itself.
If the temperature is sufficiently high, charging of the sample by thermionic emission will take over. In this case, the experiment has arrived at a parameter regime where the sample is self-stabilizing. Thermionic emission is favored by a low work function. Thus, electrostatic levitation works particularly well with refractory metals, such as Zr, V, Ti, and others [7].
Figure 3 shows a photograph of the electrode system with a levitating metal sample. A typical sample diameter is between 1 and 2 mm. The liquid samples are typically spherical and there is no turbulent fluid flow. Levitation of larger samples with up to 6 mm in diameter is possible, when the electrical fields are sufficiently large, i.e., around 40 kV. Such big samples, which are needed in neutron scattering experiments, are no longer spherical [51].

Photograph of an electrostatically levitated liquid Al sample at ≈ 900 K. The sample levitates between two electrodes, whereas the top electrode is clearly visible. Smaller electrodes arranged laterally below sample provide lateral position control. The opening of the ultra violet light source for re-charging the sample is hidden behind it [63]
Positioning and heating are decoupled, and no principle or theoretical restrictions with respect to the processible materials classes exist. One advantage of ESL is the broad number of properties that can be measured with it, as well as their expected accuracy [7].
Due to the absence of fluid flow, sample oscillations do not occur spontaneously and, where they are needed, must be excited by an external trigger. Positioning is not intrinsically stable and operation can be very challenging when charge is lost due to evaporation or small impurities. Thus, in practice, evaporation poses a major problem with many materials prohibiting their processability at all [7].
3 Diagnostical Methods
3.1 General
The main challenge with levitation techniques consists in the development of suitable diagnostics for the contactless measurement of thermophysical properties. These methods are mainly common for all levitation techniques and thus are introduced independently. The current portfolio contains density, surface tension, viscosity, self-diffusion coefficient, normal spectral- as well as total hemispherical emissivity, heat capacity, and thermal- as well as electrical conductivity [53]. As a detailed discussion of all these techniques would exceed the volume of this paper, we restrict only to density, viscosity, and self-diffusion coefficient. These are also those properties, where reliable data have been measured with both techniques. However, while density and self-diffusion coefficient can be measured by both, electromagnetic and electrostatic levitation, ground-based measurements of the viscosity are only possible in electrostatic levitation. Data are given for each of the cases for EML and ESL and a general comparison has been performed.
3.2 Temperature
All levitation methods have in common that also the temperature T needs to be measured in a contactless way. There are several methods available. The most common one involves an infrared pyrometer and the assumption that the spectral emissivity is fairly independent of temperature.
The pyrometer is aimed at the sample either from the top or from the side. As the sample’s normal spectral emissivity is generally not known, the pyrometer signal TP must be recalibrated with respect to the known liquidus temperature TL. For this purpose, Wien’s law is formulated for the sample as an assumed black body with effective temperature TP at wavelength λ,
and for the sample with real emissivity ε(T) and real temperature T:
In Eqs. 6 and 7, L and LB are the respective radiances of the real sample and the assumed black body. c1 and c2 are known constants. TP is chosen such that LB and L are equal, i.e.,
In particular, if TL is the liquidus temperature and TP,L is the corresponding pyrometer signal, Eq. 8 reads as follows:
Equalizing Eqs. 8 and 9 and assuming that ε is approximately constant over the temperature range of interest yield the following simple and well-known relation for the correction of the pyrometer signal [16]:
It should also be noted that Eq. 10 does not depend on a specific choice of ε. The only requirement is that ε(T) is sufficiently independent of T over the experimentally scanned temperature range. For most liquid metals and homogeneous alloys, this is indeed a good approximation [16,17,18,19, 54]. In the case of demixed alloys, however, the surface composition may strongly depend on T and, thus, also the emissivity. In such cases, Eq. 10 cannot be used.
In order to understand what changes in ε are acceptable, it is worth to consider the precise measurements of Ref. [54] for liquid Ni and Fe. They show that, over a temperature range of almost 200 K, the temperature dependence of the normal spectral emissivity is “negligible” which corresponds to a change of ε by -0.014 per K. The latter value is equal to the expanded uncertainty of 0.015, i.e., to roughly 6 %.
An example pyrometer record during a typical experiment is shown in Fig. 4. Starting with a solid sample and at constant heating power, the observed pyrometer signal TP rises until melting begins. At this point, the solidus, a small kink can be observed in TP. Some materials also exhibit an apparent drop in temperature due to the loss of surface roughness which results in a smaller apparent emissivity, see Fig. 4. In the cases of pure metals or congruently melting systems, a constant TP is observed during melting until the sample has fully melted. In alloys with a melting range, TP keeps rising during melting but on a much smaller rate. At the liquidus point where melting is completed, TP has another kink and rises faster thereafter. TP,L is then identified as the value of TP at the point of the slope change. The real liquidus temperature TL which is also needed in Eq. 10 is taken from literature or it is determined from independent experiments. Knowing TP,L and TL, T can be determined via Eq. 10.

Typical temperature record during melting. The output signal TP is used to calibrate the pyrometer with respect to the known liquidus temperature TL. TP,L is hereby the pyrometer signal at the liquidus point. When the sample begins to melt, the effective emissivity slightly decreases which, in this example, results in an apparent temperature drop. An ideal (simplified schematic) temperature time profile with marked solidus (TS) and liquidus (TL) temperature is shown by the inset. The vertical dotted lines mark solidus and the liquidus [65]
3.3 Density
3.3.1 Shadowgraph Technique
Density and thermal expansion are measured from the liquid sample by measuring its volume. It is usually accomplished by illuminating the sample from one side and recording shadow images on the other [55].
The light source is often an expanded laser and the camera is equipped with a polarizer and a band pass. The latter assures that only light from the laser is detected. A lens and a pinhole (ϕ = 0.5 mm) act together as optical Fourier filters removing scattered light and reflections, see Fig. 5. Instead of the laser, an incoherent light source can also be used.

Schematic diagram of the optical setup for density and surface tension measurement: Density is measured by the side view camera and, if necessary, with an additional 2nd camera in top view position [39]. Surface tension is measured by the top view camera only
The shadow graph principle becomes obvious from the photograph displayed in Fig. 1. The light of the expanded laser appears as a red circle on the right side. The shadow of the sample is visible in the reflection of the beam at the chamber window on the left.
The images are analyzed by an edge detection algorithm which locates the edge curve, R(φ). Here, R and φ are the radius and polar angle with respect to the drop center. In order to eliminate the influence of surface oscillations on the shape of the shadow snapshot, the edge curve is averaged over typically 1000 frames and fitted with Legendre polynomials of order ≤ 6 [55].
If it can be assumed that the averaged edge curve corresponds to a body which is rotationally symmetric with respect to the vertical axis, the volume of this body can be calculated using the following integral [39, 55]:
In Eq. 11, VP,Circle is the volume in pixel units. The subscript “Circle” indicates that, on average, the cross section is circular. The real volume V is related to the volume in pixel units by a calibration procedure using bearing balls with different radii [55]. In electrostatic levitation, these balls are directly levitated. In electromagnetic levitation, they cannot be levitated since they would also warm up and thermally expand. Therefore, the balls are hung into the coil by suspension filaments. The shadows of the latter are manually removed before the software determines the volumes of the balls.
The density, finally, is calculated from ρ = M/V, where M is the mass of the sample.
The method described here relies on the assumption that, averaged over time, the sample is symmetric with respect to the vertical axis. This assumption is normally fulfilled in electrostatic levitation, where the sample shape can be approximated by a sphere. It is also easily fulfilled, if experiments are performed under microgravity where, due to the isotropy of the acting forces a spherical shape is evident as well. In ground-based electromagnetic levitation, the samples are symmetrical with respect to the vertical axis, as the coil imposes generally a cylindrical symmetry.
If this assumption is violated, the data exhibit extremely large uncertainties. One typical problem in this context is sample rotation which leads to a permanent deformation of the sample or static deformation due to misalignment of the coil- or electrode system. In principle, this problem can occur with any levitation technique. However, due to the strong magneto-hydrodynamic fluid flow, electromagnetic levitation is more often subject to these problems than electrostatic levitation.
In electrostatic levitation, the sample is comparatively small and can be assumed to be rotational symmetric, even in the presence of some moderate rotation. The number of images averaged does not significantly affect the derived sample volume. This holds as long as the viscosity is not so large that deformation of the sample is no longer recovered on the time scale of the measurement as in the cases of some glass forming alloys below TL.
For electromagnetic levitation, Fukuyama et al. tried to suppress the flow by superimposing a strong static magnetic field of several teslas on the levitation field [56, 57]. As a result, nearly all fluid flow is suppressed and the shape of the sample is approximately spherical.
Another strategy has been reported by Brillo et al. [39] who added a second camera directed at the sample from the top to the system, see Fig. 5. Over the number of recorded frames, this camera determines the temporal average of the horizontal cross section < Areal > , while it is assumed in Eq. 11 that this cross section has circular shape, < Acircl > .
Thus, in the new method, Eq. 11 needs to be corrected by < Areal > :
Thus, the condition of axial symmetry corresponds to Areal/Acircle = 1.
Figure 6 shows data of a heavily rotating Ni50Ti50 droplet. (In the notation of sample compositions, the subscripts mean mole percentage throughout the entire paper). The strong rotations lead to deformation of the sample due to centrifugal forces. Without using the second camera, the empty symbols are obtained. The resulting data are superimposed by artifacts and do not reflect the true density. It appears far too small and its scatter is far too large. In addition, there are apparent jumps in the density, and in the same plot, positive as well as negative apparent slopes can be observed.

Density data of liquid Ni50Ti50 versus temperature [39]. The sample is heavily rotating and the axis-symmetry is severely violated. The empty symbols represent results obtained under the assumption of axis-symmetry, Eq. 11. The solid symbols represent the same measurement but with an additional camera correcting for the missing axis-symmetry [39]. The dotted line corresponds to data measured by Zou [58] using electrostatic levitation, while the dashed line represents data measured by Watanabe et al. [63] in EML combined with a 2T DC magnet
Applying the second camera method and correcting the results according to Eq. 12 give the measurement indicated by the solid symbols in Fig. 6 [39]. These are in excellent agreement with corresponding literature values determined by electrostatic levitation [58] or by electromagnetic levitation combined with a DC magnetic field [57].
3.3.2 Data EML
As an example, Fig. 7 shows density data of pure liquid Ti [39]. The different symbols correspond to different samples and measurement runs. The overall temperature interval ranges from 1920 K to 2150 K. In this example, undercooling was not observed. Over the temperature interval, the density ranges from 4.15 g·cm−3 to 4.10 g·cm−3. There is a linear dependence on temperature and the slope is negative, corresponding to the positive thermal expansion usually seen. The figure also shows literature data, represented as lines, of Amore [59], Mills [60], and Ozawa [61]. The first was measured in EML and the latter in ESL. The data by Mills [60] correspond to a recommendation given after an assessment of several other measurements and there seems to be a very good agreement with the experimental data in Fig. 7. However, the data of Amore [59] is slightly lower than the two previous ones, although it was measured in the same apparatus some years earlier and the ESL data by Ozawa [61] is slightly larger. The deviation of all data sets is approximately within the proposed ± 1 %-margin and thus demonstrates that 2 % is a good estimate for the expanded uncertainty (coverage factor = 2) [62] of the density measurement in EML. The value of 2 % is also confirmed by a more detailed and comprehensive analysis in Ref. [3]. Moreover, in Ref. [61], an expanded uncertainty of 2.4 % is specified for the measurement of the density of pure Ti in ESL.

Density of liquid Ti versus temperature (symbols) as measured in our EML facility. The solid line is a linear fit to all symbols and the dotted and the dashed lines correspond to data from Refs. [59] and [63], respectively. The dash-dotted line represents data measured in electrostatic levitation by Ozawa et al. [61]
3.3.3 Data ESL
Figure 8 shows the measured density of a Ti-Ni alloy, Ti76Ni24, measured in EML by Brillo et al. [39] and Watanabe [63] as well as by Zou et al. [58] measured in ESL. The latter two results were obtained for Ti75Ni25. In the EML experiment, the sample was measured in a temperature range from 1239 K to 1743 K in Ref. [39] or from 1199 K to 1545 K in Ref. [63]. The density data measured in the ESL are obtained between 1101 and 1734 K. In addition, the results of Wilden et al. [64] for Ti75Ni25 are also shown where the latter cover a temperature range from 1192 K to 1405 K.

The compositional difference of the density between the two alloys is negligible. The differences in the measured density values reflect the absolute experimental uncertainties as will be discussed below. The density measured in ESL shows less scattering and a higher number of data points compared to that of the EML measurement. This is due to the continuous recording of sample images during cooling, as it is not necessary to average over a large number of recorded images as in EML. In fact, as long as the levitated sample is quiescent, the exact number of sample images averaged does not affect the derived density value significantly.
3.3.4 Uncertainty considerations
In experiment, the combined standard uncertainty in the density measurement is Δρ/ρ = ± 1 % [65]. The main contributions to this uncertainty originate from mass loss which must not be larger than 0.1 %. Another contribution originates from an uncertainty in the calibration, where the bearings balls are used. The temperature coefficient of the density is of the order of 10–4 g·cm−3·K−1. Assuming that the visible pixel-radius of the sample is typically 200 pixel, a pixel resolution of ≈0.5 pixel is required in order to distinguish two density values corresponding to a temperature difference of 10 K. The use of a sub-pixel algorithm is thus mandatory. As explained earlier, strong rotation and sample movements can impact the accuracy of the measurement severely or make it impossible, due to the violation of the axial symmetry condition. Another challenge is strong evaporation. As density is directly proportional to the mass, its error is directly proportional to the mass lost during the measurement run. Processing at lower temperature or quick processing might provide potential work-arounds.
For the density measurements preformed in ESL, different sources of uncertainties have been discussed extensively by several groups [7, 56, 57, 61, 66]. The applied image processing algorithms are similar to that described in 3.3.1. Using sub-pixel algorithm, the uncertainty resulting from the image processing and from the calibration can be as low as 0.1 % [7]. Therefore, the precision is sufficient to also detect small changes in the density by temperature (i.e., thermal expansion). The largest uncertainties in the density measurements using ESL originate from uncertainties in temperature and mass loss due to evaporation. However, in Ref. [61], the numerical fitting algorithm in combination with the optical resolution and effects due to sample motion are identified as main error sources resulting in a standard uncertainty of roughly 1.4 %. The contributions due to sample motion, in particular translation along the optical axis, lead to apparent changes in the sample diameter. The latter kind of uncertainty can be eliminated by using a telecentric objective even if the depth of the focus of the telecentric objective is rather small. The optical effect of typically drifts in the sample position, which are below 0.5 mm, can be suppressed by using a relatively large sample-camera distance. This is demonstrated in the work of Wilden et al. [64] (below 1 % at least ~ 300 mm distances).
The different sources of error and their impact on a density measurement are summarized semi-quantitatively in Table 1.
3.4 Viscosity
3.4.1 Oscillating drop technique
In order to measure the viscosity η of a levitating liquid droplet, the oscillating drop technique is employed. In this technique, the sample performs oscillations of the fundamental mode. Due to the absence of turbulent fluid flow, spontaneous oscillation excitation, as in ground-based EML, does not occur. Instead, the oscillation needs to be excited by an external trigger. In the microgravity environment—not discussed here—this trigger is a heating pulse that briefly compresses (i.e., “squeezes”) the cross section of the sample which then oscillates. In ESL, a sinusoidal voltage of 0.2–4 kV is superimposed over the electric field at a frequency close to the eigen-frequency of the sample. When the fundamental P2,0 mode has stabilized, the field is switched off and the sample oscillates freely with a frequency close to its eigen-frequency and the oscillation elongation decays with time due to the damping by the inner friction.
During an experiment, the sample is observed with a high-speed camera that records frames with a sufficiently high framerate so that 10–20 frames are collected per oscillation swing assuring that the viscosity can be determined with accuracy of approximately 1 %.
The images are analyzed by an edge detection algorithm which obtains the radius as function of time, r(t).
As long as the droplet is spherical and forced convection is of negligible influence, the viscosity can be determined from the decay time τl of the oscillation mode Pl,0. For this purpose, Lamb’s law [67] is applied which reads in its general form
and in the special case of the l = 2 mode
There are several ways how τ2 can be determined in practice. The standard way is to fit the time t dependent radius r(t) by the law of a damped oscillation with τ2, \({\omega }_{2}\), \({\Delta R}_{0}\) (and eventually other, such as a phase shift) as fit parameters, where \({\omega }_{2}\) is the oscillation frequency and \({\Delta R}_{0}\) is the amplitude:
Such a fit is shown for the example of liquid Zr64Ni36 [68] in Fig. 9.

It is also important to note that Lamb’s law is only valid for small oscillation amplitudes, i.e., if the \({\Delta R}_{0}\) is not larger than 10 % of the total radius R0 of the sphere. In other cases, the oscillation may drive vortex flows which act as additional energy sinks and thus increase the observed damping time τ2 leading to an apparent viscosity which is too large.
These vortex flows may even result in turbulence as investigated by Xiao [69] for EML samples processed in microgravity on the International Space Station ISS and comparing the results with those of the same samples measured in ESL. He identified two regimes called “overshoot decay” and “free decay.” The first is governed by the turbulent flow which decays much faster than the laminar flow during the “free decay”-regime. The free decay-regime is characterized by the absence of turbulence and there is laminar flow only, so that the viscosity can be obtained from the observed damping time.
In Ref. [69], conditions were discussed under which the “free decay” regime is obtained.
3.4.2 Data EML
Viscosity cannot be reasonably measured in ground-based electromagnetic levitation as has been demonstrated by Schneider during his PhD work [47]. One reason is the turbulent flow which is immanent to EML samples on ground. However, the turbulent flow could be minimized or avoided if the sample diameter was chosen to be sufficiently small. The other reason is due to the strong magnetic field necessary to position the sample against gravity. It leads to a deviation of the sample shape from a sphere and to an additional strong damping resulting in an overall damping of \({\Gamma }_{exp}={\Gamma }_{vis}+{\Gamma }_{mag}\). Here, the symbol \(\Gamma\) refers to the damping constant which is the inverse of the corresponding decay time and the suffices “exp,” “vis,” and “mag” denote the experimentally observed damping-, the viscous damping-, and the magnetic damping coefficient, respectively. In general, \({\Gamma }_{exp}\) is one or two orders of magnitude larger than \({\Gamma }_{vis}\), i.e., \({\Gamma }_{exp}\gg {\Gamma }_{vis}\).
The Hartmann-number, \(Ha\), can be calculated from the materials parameters of the sample. It may be used in order to correct the measured damping constant \({\Gamma }_{exp}\) according to
However, the analysis in Ref. [47] shows that this leads to the correct order of magnitude of \({\Gamma }_{vis}\) but with an error that is of the same magnitude as \({\Gamma }_{vis}\), so that it is not practically possible to measure viscosity in ground-based EML.
3.4.3 Data ESL
In contrast to ground-based EML, terrestrial ESL provides the necessary conditions for measuring the melt viscosity using oscillating drop technique. Since the electrostatic levitation field does not include turbulent flow in the samples and the lamellar flow is present, Lamb’s law can be used to derive melt viscosity. Fluid flow can be still present, if there is a temperature gradient across the sample [44]. However, typically temperature gradients can be largely (down to within the uncertain of the pyrometer) when heating a small sample (~ 2 mm in diameter) with heating by two or several lasers from different sides of the sample [51, 70].
Still, to properly determine the melt viscosity using the oscillating drop technique demands rather idealized conditions. In particular, the damping of the oscillation should be solely due to viscous flow, and no additional excitation occurs during the damping phase. It was demonstrated by Brillo et al. [68] and Heintzmann et al. [71] that these kinds of artifacts can be ruled out if the apparent viscosity is independent of the sample mass or size. This independence of the data on the sample mass is depicted as an example in Fig. 10 for Ni66.7B33.3 [72]. It has been found that for metallic glass forming liquids at temperatures near the liquidus temperature, the melt viscosity is located in the range of 10 to 250 mPa s. The most suitable sample mass will then be between 20 and 100 mg corresponding to a size of 2 to 3 mm in diameter. For even smaller samples or higher melt viscosities, one enters the overdamped regime. For larger samples or lower viscosities, the probability that additional excitations occur during damping increases [71].

Viscosity of Ni66.7B33.3 [72] measured by using the rheometer (blue diamonds) and electrostatic levitation (red squares) versus temperature. Full red squares show data obtained using a sample mass of 30 mg and open red squares represent data of a 50 mg sample (Color figure online)
Overall for reactive samples like Zr-based alloys, containerless measurement techniques provide a better reliability which can be then used to benchmark the results of conventional techniques. For example, it has been found that for a Zr-based alloy Zr59.3Cu28.8Al10.4Nb1.5, the melt viscosity can still be correctly determined by rotating cup method using graphite as a crucible material, as long as the temperature is not too high (see also [73]), and if the oxygen content is below 1.0 at.% [74]. If the melt is not very reactive, good agreements can be found between the ESL and container-based technique like rheometer [72] (see Fig. 10).
3.5 Self-diffusion coefficient
3.5.1 Technique
Classical experiments to determine diffusion coefficients in liquid metals, e.g., experiments using the long-capillary method [75], are often hampered by buoyancy-driven convective fluid flow and chemical reactions of the melt with the capillary. For these reasons, experimental diffusion data in liquid alloys are rare, especially at high temperatures. Quasielastic neutron scattering (QNS) probes the atomic self-dynamics on atomic time and length scales. Therefore, the resulting data are not affected by convective flow. This allows to measure self-diffusion coefficients on an absolute scale for liquids containing an incoherently scattering element [76,77,78,79]. Moreover, the combination of this technique with containerless processing methods avoids chemical reactions of the liquids with container or capillary materials. Here, we present a short outline of the fundamentals of QNS. A more detailed description is found e.g., in Refs. [77,78,79]. In an inelastic or quasielastic neutron scattering experiment, the intensity of the neutrons scattered at a sample is measured as a function of momentum transfer Q = k − k' and energy transfer ΔE = ħω = E − E'. Here, Q denotes the scattering vector, k and k' are the wave vectors of the incoming and scattered neutrons, E and E' are the energies of the incoming and scattered neutrons, and ω is the frequency corresponding to the change of energy.
The partial differential scattering cross section d2σ/dΩdE' of the sample describes the fraction of neutrons with a final energy between E' and E' + dE' that are scattered per time unit into a small solid angle dΩ. It consists of a coherent and an incoherent contribution:
The coherent scattering function is defined by:
Here, σc denotes the (averaged) coherent neutron scattering cross section of the sample material. The coherent scattering function is linked by Fourier transformation with the time-dependent pair correlation function
that describes the probability to find any scatterer at the time t at the location r, if at time t = 0 a scatterer is located in the origin (r = 0). Hence, the time-dependent pair correlation function provides information of correlations between different atoms including information on the structure of the sample or on collective motions of the atoms.
In a similar way, the incoherent scattering function is related with the incoherent contribution of the partial differential scattering cross section:
In this formula, σi denotes the (averaged) incoherent neutron scattering cross section of the sample material. The incoherent scattering function is linked by Fourier transformation with the self-correlation function
It describes the probability to find a scatterer at the time t at the location r, if the same scatterer at time t = 0 was located in the origin (r = 0). Hence, the self-correlation function describes the self-diffusion of the atoms and obeys the diffusion equation:
where D denotes the self-diffusion coefficient. The self-intermediate scattering function is defined by
With Eq. 22, it follows
One solution of this differential equation is
Because of Eq. 21, Is(Q,t) is linked with the incoherent scattering function:
With Eq. 25, it follows that the incoherent dynamic structure factor has the form of a Lorentzian function
with a half width at half maximum of
centered around the elastic case ω = 0. Hence, the self-diffusion coefficient D can be determined from the linear slope when plotting the half width at half maximum Г1/2 of the incoherent contribution of the dynamic structure factor Si(Q,ω) as a function of Q2.
According to Eq. 17, the experimentally determined partial differential scattering cross sections consist of a coherent and an incoherent contribution. Due to the fact that the incoherent contribution gives the information on the self-diffusion of atoms, only the self-diffusion of atoms showing a significant incoherent scattering cross section (like e.g., Ni, Co, Ti, Cu) can be studied by QNS. Moreover, the measured signal must be dominated by the incoherent scattering contribution, which is usually the case during small momentum transfer (Q → 0).
The technique of QNS has been combined with containerless processing techniques like EML [80] and ESL [51], allowing the measurement of self-diffusion coefficients even in the metastable regime of an undercooled melt and avoiding chemical reactions of the melts with crucible materials or capillaries. Moreover, due to the absence of materials in the vicinity of the samples, the background scattering is strongly reduced resulting in an excellent signal-to-background ratio. The experiments were performed at the time of flight spectrometer TOFTOF [81] at the MLZ in Garching.
Figure 11 shows schematically the experimental setup used for quasielastic neutron scattering experiments on electrostatically levitated melts. The positively charged sample (S) is levitated in the electric field between two vertically arranged electrodes (GE,TE) supplied with a high voltage of up to 40 kV such that the electrostatic force compensates for the gravitational force as discussed before. In order to allow for a compact facility with dimensions compatible with different neutron scattering instruments and to achieve a large free-scattering angle, the two perpendicular position laser beams are entering from the top into the chamber and reflected by mirrors on the sample. The mirrors M1 and M3 are located in the scattering plane reflecting the beam onto the sample and on a PSD on the top of the chamber (Fig. 11). A third mirror (M2) is mounted below the scattering plane and reflects the laser beam on the sample. The laser beam then directly passes to a PSD mounted at the side of the chamber (Fig. 11). The position signals from the PSDs serve as input for a closed-loop sample position control algorithm [35] that adjusts the high voltages supplied by high-voltage amplifiers to the electrodes every 2 ms. The electrode system is placed in a high vacuum chamber which is evacuated with a turbo molecular pump (TP). A pressure of about 10−7 mbar can be reached within 1 h of pumping time.

Schematic drawing of the experimental setup for quasielastic neutron scattering at electrostatically levitated samples [51]. Left: vertical cut and right: horizontal cut. S sample, GE ground electrode, TE top electrode, SE side electrodes, M1–M3 mirrors, L Laser (with beam expander) for sample position detection; PSD position sensitive detector, HV high-voltage feedthrough, TP turbo molecular pump, UV UV lamp, n neutron beam, NW neutron window in vacuum chamber, IR/PY combined IR heating laser, pyrometer and charge-coupled device (CCD) camera unit, SL neutron slit system, A B4C aperture, BS Cd neutron beam stop, D neutron detector
For heating of the samples, a 75 W infrared fiber-coupled diode laser (IR) with a wavelength of 808 nm is used, which allows to melt metals with high melting temperatures above 2000 K. The sample temperature is measured with a fiber-coupled two-color pyrometer (PY) working in the wavelength ranges of 1650–1750 nm and 1850–2000 nm that is typically operated in single color mode. The pyrometer and a charge-coupled device (CCD) camera for sample observation are integrated into the heating laser system using the same optics. This allows for a compact facility design and a convenient laser adjustment.
A UV lamp (UV) is used to compensate the charge loss due to the sample evaporation during heating. A He discharge lamp is utilized that irradiates the sample directly through a differentially pumped capillary with UV light of about 20 eV energy. At elevated sample temperatures above about 1200 K, thermionic emission becomes sufficiently strong for charging of the sample.
The neutron beam (n) is adjusted in size by a slit system (SL) and enters the vacuum chamber through a neutron window (NW) that is machined into the Al container wall and has a thickness of 2 mm. The neutron window covers an angle of 220° horizontally and ± 20° vertically. A neutron absorbing B4C aperture (A) shapes the beam again inside the vacuum chamber in front of the sample. The aperture is tilted by 45° with respect to the incident neutron beam to ensure that radiation scattered to high angles is not shaded by the aperture. A beam stop (BS) of neutron absorbing Cd is mounted behind the sample in order to avoid background scattering of the direct beam at the backside of the chamber.
In a similar way as described here for the case of electrostatic levitation, also the electromagnetic levitation technique can be combined with neutron scattering techniques [82], including quasielastic neutron scattering at the time of flight spectrometer TOFTOF [80].
3.5.2 Data EML and ESL
The first QNS experiments on electromagnetically levitated melts were performed for pure liquid Ni [80]. Figure 12 shows the dynamic structure factor measured a momentum transfer of Q = 0.9 Å−1 at temperatures of T = 1514 K and T = 1870 K. The measured data are well described by Lorentzian functions, Eq. 26, convoluted with the instrumental energy resolution functions (lines in Fig. 12). The width of the Lorentzian functions increases with increasing temperature, indicating faster dynamics at higher temperatures. In Fig. 13, the half width at half maximum Г1/2 of Si(Q,ω) is plotted as a function of Q2 for the temperatures of T = 1514 K and T = 1870 K. Г1/2 shows a linear Q2 dependence up to a value of about Q2 ≈ 1.5 Å−2, above which the increasing contribution of coherent scattering cannot be neglected anymore. From the slopes of the linear fits (Fig. 13), the Ni self-diffusivities are determined according to Eq. 27 [80]. In Fig. 14, these are shown as a function of the temperature together with results obtained by QNS at Ni melts processed in a crucible [83]. Both sets of data are in good agreement. It is, however, noteworthy that containerless processing makes a wider temperature range experimentally accessible. The temperature ranges from lower temperatures, even the metastable regime of deeply undercooled melts, below TL = 1726 K, to elevated temperatures of up to 1940 K, where otherwise reactions of the liquid with crucible materials are a limiting factor. Actually, the high temperature limit in the EML experiments is given by the evaporation of sample material and the necessary experiment times on the order of hours (deposition of evaporated sample material on the levitation coil may cause electrical breakthroughs between the coil windings). Over the large investigated temperature range, the temperature dependence of the diffusivity can be well described by an Arrhenius law, D = D0 exp(−EA/kBT), with an activation energy of EA = 0.47 ± 0.03 eV and a pre-exponential factor of D0 = (77 ± 8)·10−9 m2 s−1 (black line in Fig. 14) [80].

Scattering law S(Q,ω) of liquid Ni at T = 1514 K (solid symbols) and T = 1870 K (empty symbols) for a momentum transfer of Q = 0.9 Å−1. The lines are fits with a Lorentzian function convoluted with the instrumental energy resolution [80]

Half width at half maximum Гi of the dynamic structure factor Si(Q,ω) as a function of Q2 at T = 1514 K (blue symbols) and T = 1870 K (red symbols) [80] (Color figure online)

In a similar way as shown here for liquid Ni, the Ti self-diffusion coefficient in pure liquid Ti was determined by combination of QNS with EML a temperature of T = 2000 K, giving a value of DTi = (5.3 ± 0.2) × 10−9 m2s−1 [84].
The examples discussed before were concerned with the measurement of self-diffusion coefficients in melts of pure elements. In the case of alloy melts, the situation is more complex. In general, the alloy components are characterized by different incoherent scattering cross sections. Hence, by QNS, a weighted average of the self-diffusivities of the components is measured. In some cases, the incoherent scattering cross section of one or more components is negligible as compared to that of other components. In such cases, the (averaged) self-diffusivity is measured of those components that show a significant incoherent scattering cross section.
For instance, in binary Zr–Ni, Zr-Co, Zr-Cu melts, the alloy component Zr shows a very small incoherent scattering cross section of 0.02 barn (10–28 m2), while Ni, Co, or Cu are characterized by significantly higher incoherent scattering cross sections of 5.2 barn (10–28 m2), 4.8 barn (10–28 m2), and 0.55 barn (10–28 m2), respectively. Hence, the incoherent scattering in these binary melts is dominated by the scattering of the Ni, Co, or Cu atoms and the self-diffusion of these atoms is sampled by QNS. The Ni self-diffusion in liquid Zr64Ni36 has been studied by QNS combined with both, the EML [85] and the ESL [51] technique. The results are shown in Fig. 15. Both sets of data are in excellent agreement with each other. Due to the higher purity conditions in the ESL—vacuum instead of gas atmosphere—larger undercoolings below the liquidus temperature of TL = 1283 K were achieved. Also shown in Fig. 15 are the results of the temperature dependence of the self-diffusion coefficients of Ni, Cu, or Co in melts of Zr50Ni50 [86], Zr36Ni64 [86], Zr2Cu [87], Zr50Cu50 [87], Zr35.5Cu64.5 [87], and Zr2Co [78] that were measured by QNS using EML and/or ESL. It is remarkable that the Cu self-diffusion in Zr-Cu alloys is faster than the Ni self-diffusion in Zr–Ni alloys at similar compositions and temperatures, while Zr2Co shows essentially the same Co self-diffusivity as the Ni self-diffusivity in Zr64Ni36.

4 Summary
In conclusion, using the containerless processing techniques, electromagnetic levitation and electrostatic levitation, the thermophysical properties density and self-diffusion coefficient can consistently be measured. In the case of density, the overall uncertainty Δρ/ρ is approximately ± 1 %, whereas this number corresponds to the systematic deviation of all measurement from each other. The relative uncertainty (scatter) is about ± 1 % for the electromagnetically investigated samples and roughly 0.1 % for the data obtained in electrostatic levitation. In the case of the self-diffusion coefficient, no significant deviations among the different sets of data are evident. This is due to the fact that the underlying atomic dynamics occurs on a time scale different to the one of fluid flow or sample motion in either processing technique.
In the case of viscosity, a comparison between the two ground-based levitation techniques is not possible. In electromagnetic levitation, the magnetic positioning fields simultaneously drive turbulent flow and lead to a sample shape which is different from a sphere. Thus, the magnetic damping dominates the viscous damping and the contribution of the viscosity is obscured. The situation is different in electrostatic levitation, where the sample is spherical and no turbulence occurs. The viscosity data measured in electrostatic levitation appear reasonable. It is in excellent agreement with corresponding data measured in a classical container-based viscometer, as long as the viscosity is in the range between 10 and– 250 mPa·s. Oscillation is then neither overdamped nor additional modes are excited.
Containerless processing using electromagnetic and electrostatic levitation offers an excellent opportunity for the measurement of thermophysical properties. Depending on the specific property and the sample material, however, the optimum technique needs to be identified.
Data Availability
Data published in the references cited.
Abbreviations
- m, M :
-
Mass of the sample, kg
- V :
-
Volume of the sample, m3
- G :
-
Gravitational constant, kg·m·s−2
- U :
-
Voltage between the electrodes, V
- d :
-
Electrode spacing, m
- q e :
-
Charge of the sample, C
- B :
-
Magnetic field vector, µH
- F :
-
Lorentz force vector, N
- µ0 :
-
Vacuum permeability, 1.257 × 10–6 N·A−2
- a :
-
Radius of the sample with an assumed spherical shape, m
- δ :
-
Skin depth, m
- σ el :
-
Electrical conductivity, Ω−1
- ω mag :
-
Angular frequency of the magnetic field, s−1
- q :
-
Ratio of skin-depth to radius
- Q(q):
-
Efficiency factor for the force
- ρ :
-
Mass density, kg·m−3
- P :
-
Heating power, W
- H(q):
-
Efficiency factor for heating
- T :
-
Temperature, K
- T P :
-
Pyrometer signal, K
- T L :
-
Liquidus temperature, K
- T P,L :
-
Pyrometer signal at liquidus, K
- ε(T):
-
Integral emissivity coefficient
- λ :
-
Wavelength, m
- c 1 :
-
Constant in the Wien-formula, 2.33 × 103 m2·eV·s−1
- c 2 :
-
Constant in the Wien-formula, 1.438 × 10–2 K·m
- L B(T):
-
Black body radiance, W·m−3
- L(T):
-
Normal body radiance, W·m−3
- R :
-
Sample radius, pixel
- φ :
-
Polar angle in the shadow graph
- V p,circle :
-
Pixel volume of the axis-symmetric sample, pixel3
- V p,real :
-
Pixel volume of the non axis-symmetric sample, pixel3
- A circle :
-
Cross section of the axis-symmetric sample, pixel2
- A real :
-
Cross section observed by the second camera, pixel2
- η :
-
Viscosity, Pa·s
- l :
-
Oscillation mode number (“Quantum number”)
- t :
-
Time, s
- τ l :
-
Decay time of viscous damping of the mode l, s
- τ 2 :
-
Decay time of viscous damping of the mode l = 2, s
- ω l :
-
Angular oscillation frequency of mode l, s−1
- ω 2 :
-
Angular oscillation frequency of mode l = 2, s−1
- ΔR 0 :
-
Oscillation amplitude, pixel
- R 0 :
-
Radius of the spherical sample at rest, pixel
- Γ exp :
-
Damping constant observed experimentally, s−1
- Γ vis :
-
Damping constant due to viscous damping, s−1
- Γ mag :
-
Damping constant due to the magnetic field, s−1
- Ha :
-
Hartman number
- Q :
-
Scattering vector, m−1
- K :
-
Wave vector incoming neutron beam, m−1
- k’ :
-
Wave vector scattered neutron beam, m−1
- ΔE :
-
Energy transfer due to scattering, eV
- H :
-
Planck constant, 4.135 × 10–16 eV·s
- ℏ :
-
Planck constant divided by 2π, 6.582 × 10–16 eV·s
- ω :
-
Frequency corresponding to neutron energy transfer during scattering, s−1
- E :
-
Energy of incoming neutron beam, eV
- E′:
-
Energy of scattered neutron beam, eV
- σ :
-
Scattering cross section, m2
- σ c :
-
Coherent scattering cross section, m2
- σ i :
-
Incoherent scattering cross section, m2
- dΩ :
-
Small solid angle
- S(Q , ω):
-
Coherent scattering function, eV−1
- S i(Q , ω):
-
Incoherent scattering function, eV−1
- N :
-
Particle number
- G(r ,t):
-
Time dependent pair correlation function, m−3
- G i(r ,t):
-
Time dependent incoherent pair correlation function, m−3
- G S(r ,t):
-
Self correlation function, m−3
- k B :
-
Boltzmann constant, 8.617 × 10–5 eV·K−1
- r :
-
Particle position, m
- D :
-
Self-diffusion coefficient, m2·s−1
- D 0 :
-
Arrhenius pre-exponential factor of self-diffusion coefficient, m2·s−1
- E A :
-
Arrhenius activation energy of self-diffusion, eV
- I s(Q ,t):
-
Intermediate scattering function
- Γ 1/2 :
-
Half width at half maximum, eV−1
- D Ti :
-
Self-diffusion coefficient of Ti, m2·s−1
References
T. Iida, R.I.L. Guthrie, The Thermophysical Properties of Metallic Liquids, Vol 1: Fundamentals (Oxford University Press, Oxford, 2015). https://doi.org/10.1093/acprof:oso/9780198729839.001.0001
M. Holtzer, R. Danko, S. Zymankowska-Kumon, Metalurgija 51, 337 (2012)
J. Brillo, Thermophysical Properties of Multicomponent Liquid Alloys (de Gryuter, Berlin, 2016)
D. Langstaff, M. Gunn, G.N. Greaves, A. Marsing, F. Kargl, Rev. Sci. Instrum. 84, 124901 (2013). https://doi.org/10.1063/1.4832115
P.C. Nordine, R.M. Atkins, Rev. Sci. Instrum. 53, 1456 (1982). https://doi.org/10.1063/1.1137196
S. Krishnan, P.C. Nordine, J.K.R. Weber, R.A. Schiffmann, High. Temp. Sci. 31, 45 (1991). https://doi.org/10.1063/1.1148315
P.F. Paradis, T. Ishikawa, G.-W. Lee, D. Holland-Moritz, J. Brillo, W.-K. Rhim, J.T. Okada, Mater. Sci. Eng. R 76, 1 (2014). https://doi.org/10.1016/j.mser.2013.12.001
J. Brillo, G. Lohöfer, F. Schmid-Hohagen, S. Schneider, I. Egry, Int. J. Mater. Prod. Technol. 26, 247 (2006). https://doi.org/10.1504/IJMPT.2006.009469
D.M. Herlach, R.F. Cochrane, I. Egry, H.J. Fecht, A.L. Greer, Int. Mater. Rev. 38, 273 (1993). https://doi.org/10.1016/0927-796X(94)90011-6
O. Muck, German Patent 422,004, 30 Oct 1923
E.C. Okress, D.M. Wroughton, G. Comenetz, P.H. Brace, J.C.R. Kelly, J. Appl. Phys. 23, 549 (1952). https://doi.org/10.1063/1.1702249
S.T. Rony, in 7th Annual Vacuum Metallurgy Conference—Transactions, Madison, 4–9 June 1964. https://escholarship.org/uc/item/8gt9g29v
E. Fromm, H. Jehn, Brit. J. Appl. Phys. 16, 653 (1965). https://doi.org/10.1088/0508-3443/16/5/308
A.E. El-Mehairy, R.G. Ward, Trans. Met. Soc. AIME 227, 1226 (1963)
S.Y. Shiriashi, R.G. Ward, Can. Met. Quat. 3, 117 (1964). https://doi.org/10.1179/cmq.1964.3.1.117
S. Krishnan, G.P. Hansen, R.H. Hauge, J.L. Margrave, High Temp. Sci. 29, 17 (1990)
S. Krishnan, P.C. Nordine, J. Appl. Phys. 80, 1735 (1996). https://doi.org/10.1063/1.363025
S. Krishnan, Y. Yugawa, P.C. Nordine, Phys. Rev. B 55, 8201 (1997). https://doi.org/10.1103/PhysRevB.55.8201
S. Krishnan, C. Anderson, J.K. Weber, P. Nordine, W. Hofmeister, R. Bayuzick, Metall. Mater. Trans. A 24, 67 (1993). https://doi.org/10.1007/BF02669604
R.F. Brooks, B. Monaghan, A.J. Barnicoat, A. McCabe, K.C. Mills, P.N. Quested, Int. J. Thermophys. 17, 1151 (1996). https://doi.org/10.1007/BF01442002
I. Egry, S. Sauerland, Mater. Sci. Eng. A 178, 73 (1994). https://doi.org/10.1016/0921-5093(94)90521-5
I. Egry, G. Lohöfer, G. Jacobs, Phys. Rev. Lett. 75, 4043 (1995). https://doi.org/10.1103/PhysRevLett.75.4043
I. Egry, S. Sauerland, G. Jacobs, High Temp. High Press. 26, 217 (1994)
R.A. Eichel, I. Egry, Z. Metall. 90, 371 (1999)
J. Piller, R. Knauf, P. Preu, G. Lohöfer, D.M. Herlach in Proc. of the 6th European Symposium on Materials Sciences under Microgravity, ESA SP-256 (Bordaux, 1986), p. 437
M. Mohr, H.J. Fecht, Metallurgy in Space—Recent Results from ISS (The Minerals and Metals Society, Springer, Cham, 2022). https://doi.org/10.1007/978-3-030-89784-0
Team TEMPUS, in Materials and Fluids Under Low Gravity, ed. by L. Ratke, H. Walter, B. Feuerbacher (Springer, Berlin, 1996), p. 233. https://doi.org/10.1007/BFb0102508
P.F. Clancy, E.G. Lierke, R. Grossbach, W.M. Heide, Thirtieth Congress, International Astronautical Federation, s.n., 17–22 September 1979, Munich, Germany (1979)
E.G. Lierke, W.M. Heide, R. Grossbach, P.F. Clancy, ESA Mater Sci. Space (1979) p. 149–157
P.F. Clancy, E.G. Lierke, R. Grossbach, W.M. Heide, Acta Astron. 7, 877 (1980). https://doi.org/10.1016/0094-5765(80)90077-6
E.G. Lierke, R. Grossbach, G.H. Frischat, K. Fecker, ESA SP-1132 1, 370 (1991)
W.-K. Rhim, M. Collender, M.T. Hyson, W.T. Simms, D.D. Ellemann, Rev. Sci. Instrum. 56, 307 (1985). https://doi.org/10.1063/1.1138349
W.K. Rhim, S.K. Chung, D. Barber, K.F. Man, G. Gutt, A. Rulison, R.E. Spjut, Rev. Sci. Instrum. 64, 2961 (1993). https://doi.org/10.1063/1.1144475
S.A. Stratton, Electromagnetic Theory (McGraw-Hill, New York, 1941), p. 116. https://doi.org/10.1002/9781119134640
T. Meister, H. Werner, G. Lohöfer, D. Herlach, H. Unbehauen, Contr. Eng. Pract. 11, 117 (2003). https://doi.org/10.1016/S0967-0661(02)00102-8
J.R. Rogers, R.W. Hyers, L. Savage, M.B. Robinson, in Space, Technology and Applications International Forum-2001, ed. by M.S. El-Genk, 2001, AIP Conf. Proc. 552, 332 (2001). https://doi.org/10.1063/1.1357943
S. Lee, W. Jo, Y.C. Cho, H.W. Lee, G.W. Lee, Rev. Sci. Instrum. 88, 055101 (2017). https://doi.org/10.1063/1.4982363
S. Klein, D. Holland-Moritz, D.M. Herlach, Phys. Rev. B 80, 212202 (2008). https://doi.org/10.1103/PhysRevB.83.104205
J. Brillo, T. Schumacher, K. Kajikawa, Metall. Mater. Trans. A 50, 924 (2019). https://doi.org/10.1007/s11661-018-5047-8
T. Ishikawa, C. Koyama, H. Saruwatari, H. Tamaru, H. Oda, M. Ohshio, Y. Nakamura, Y. Watanabe, Y. Nakata, High Temp. High Press. 49, 5 (2020). https://doi.org/10.32908/hthp.v49.835
D.L. Cummings, D.A. Blackburn, J. Fluid Mech. 224, 395 (1991). https://doi.org/10.1017/S0022112091001817
S. Sauerland, Messung der Oberflächenspannung an levitierten flüssigen Metalltropfen, PhD thesis (RWTH-Aachen, Aachen, Germany, 1993)
R.W. Hyers, G. Trapaga, B. Abedian, Met. Trans. B 34, 29 (2003). https://doi.org/10.1007/s11663-003-0052-7
R.W. Hyers, Meas. Sci. Technol. 16, 394 (2005). https://doi.org/10.1088/0957-0233/16/2/010
J. Priede, G. Gerbeth, IEEE Trans. Magn. 36, 349 (2000). https://doi.org/10.1109/20.822545
J. Priede, G. Gerbeth, IEEE Trans. Magn. 36, 354 (2000). https://doi.org/10.1109/20.822546
S. Schneider, Viskositäten unterkühlter Metallschmelzen, PhD thesis (RWTH-Aachen, Aachen, Germany, 2002). https://publications.rwth-aachen.de/record/58704/files/Schneider_Stephan.pdf
Y. Luo, B. Damaschke, S. Schneider, G. Lohöfer, N. Abrosimov, M. Czupalla, K. Samwer, npj Microgravity 2, 1 (2016). https://doi.org/10.1038/s41526-016-0007-3
H. Kimura, M. Watanabe, K. Izumi, T. Hibiya, D. Holland-Moritz, T. Schenk, K.R. Bauchspieß, S. Schneider, I. Egry, K. Funakoshi, M. Hanfland, Appl. Phys. Lett. 78, 604 (2001). https://doi.org/10.1063/1.1341220
P.F. Paradis, T. Ishikawa, J. Yu, S. Yoda, Rev. Sci. Instrum. 72, 2811 (2001). https://doi.org/10.1063/1.1368860
T. Kordel, D. Holland-Moritz, F. Yang, J. Peters, T. Unruh, T. Hansen, A. Meyer, Phys. Rev. B 83, 104205 (2011). https://doi.org/10.1103/PhysRevB.83.104205
P.F. Paradis, T. Ishikawa, S. Yoda, Space Technol. 22, 81–92 (2002)
J. Brillo, in Metallurgy in Space—Recent Results from ISS, ed. by M. Mohr, H.J. Fecht (The Minerals and Metals Society, Springer, Cham, 2022), pp. 181–200. https://doi.org/10.1007/978-3-030-89784-0_8
H. Kobatake, H. Khosroabadi, H. Fukuyama, Meas. Sci. Technol. 22, 015102 (2011). https://doi.org/10.1088/0957-0233/22/1/015102
J. Brillo, I. Egry, Int. J. Thermophys. 24, 1155 (2003). https://doi.org/10.1023/A:1025021521945
S.K. Chung, D.B. Thiessen, W.K. Rhim, Rev. Sci. Instrum. 67, 3175 (1996). https://doi.org/10.1063/1.1147584
M. Adachi, T. Aoyagi, A. Mizuno, M. Watanabe, H. Kobatake, H. Fukuyama, Int. J. Thermophys. 29, 2006 (2008). https://doi.org/10.1007/s10765-008-0533-7
P.F. Zou, H.P. Wang, S.J. Wang, L. Hu, B. Wei, Metall. Mater. Trans. A 49, 5488 (2018). https://doi.org/10.1007/s11661-018-4877-8
S. Amore, S. Delsante, H. Kobatake, J. Brillo, J. Chem. Phys. 139, 064504 (2013). https://doi.org/10.1063/1.4817679
K.C. Mills, Recommended Values of Thermophysical Properties for Selected Commercial Alloys (Woodhead Publishing Ltd., Cambridge, 2002)
S. Ozawa, Y. Kudo, K. Kuribyashi, Y. Watanabe, T. Ishikawa, Mater. Trans. 58, 1664–1669 (2017). https://doi.org/10.2320/matertrans.L-M2017835
BIPM, IEC, IFCC, ILAC, ISO, IUPAC, IUPAP, and OIML. Evaluation of measurement data—Supplement 1 to the ‘Guide to the expression of uncertainty in measurement’—Propagation of distributions using a Monte Carlo method. Joint Committee for Guides in Metrology, JCGM 101 (2008). https://doi.org/10.1007/s10853-018-3098-2
M. Watanabe, M. Adachi, H. Fukuyama, J. Mater. Sci. 54, 4306–4313 (2019). https://doi.org/10.1007/s10853-018-3098-2
J. Wilden, F. Yang, D. Holland-Moritz, S. Szabó, W. Lohstroh, B. Bochtler, R. Busch, A. Meyer, Appl. Phys. Lett. 117, 013702 (2020). https://doi.org/10.1063/5.0012409
J. Brillo, I. Egry, I. Ho, Int. J. Thermophys. 27, 494 (2006). https://doi.org/10.1007/s10765-005-0011-4
H. Yoo, C. Park, S. Jeon, S. Lee, G.W. Lee, Metrologia 52, 677 (2015). https://doi.org/10.1088/0026-1394/52/5/677
H. Lamb, Hydrodynamics, 6th edn. (Cambridge University Press, Cambridge, 1932)
Brillo et al., Phys. Rev. Lett. 107, 165902 (2011). https://doi.org/10.1103/PhysRevLett.107.165902
X. Xiao, J. Brillo, J. Lee, R.W. Hyers, D.M. Matson, npj Microgravity 7, 1 (2021). https://doi.org/10.1038/s41526-021-00166-4
J. Schroers, S. Bossuyt, W.-K. Rhim, J.Z. Li, Z.H. Zhou, W.L. Johnson, Rev. Sci. Instrum. 75, 4523 (2004). https://doi.org/10.1063/1.1804351
P. Heintzmann, F. Yang, S. Schneider, G. Lohöfer, A. Meyer, Appl. Phys. Lett. 108, 241908 (2016). https://doi.org/10.1063/1.4953871
S. Nell, F. Yang, Z. Evenson, A. Meyer, Phys. Rev. B 103, 064206 (2021). https://doi.org/10.1103/PhysRevB.103.064206
B. Jiang, Y.R. Liang, X.Y. Yu, G. Yuan, M.T. Zheng, Y. Xiao, H.W. Dong, Y.L. Liu, H. Hu, J. Alloys Compd. 844, 155508 (2020). https://doi.org/10.1016/j.jallcom.2020.155508
I. Jonas, W. Hembree, F. Yang, R. Busch, A. Meyer, Appl. Phys. Lett. 112, 171902 (2018). https://doi.org/10.1063/1.5021764
A. Griesche, M.P. Macht, G. Frohberg, J. Non-Cryst. Solids 353, 3305 (2007). https://doi.org/10.1016/j.jnoncrysol.2007.05.076
A. Meyer, Phys. Rev. B 66, 134205 (2002). https://doi.org/10.1103/PhysRevB.66.134205
G.L. Squires, Introduction to the Theory of Thermal Neutron Scattering (Cambridge University Press, Cambridge, 2012)
J.P. Boon, S. Yip, Molecular Hydrodynamics (McGraw-Hill, New York, 1980)
J.P. Hansen, I.R. McDonald, Theory of Simple Liquids (Academic, London, 1976)
A. Meyer, S. Stüber, D. Holland-Moritz, O. Heinen, T. Unruh, Phys. Rev. B 77, 092201 (2008). https://doi.org/10.1103/PhysRevB.77.092201
T. Unruh, J. Neuhaus, W. Petry, Nucl. Instr. Methods A 580, 1414 (2007). https://doi.org/10.1016/j.nima.2007.07.015
D. Holland-Moritz, T. Schenk, P. Convert, T. Hansen, D.M. Herlach, Meas. Sci. Technol. 16, 372 (2005). https://doi.org/10.1088/0957-0233/16/2/007
S. Mavila Chathoth, A. Meyer, M.M. Koza, F. Juranyi, Appl. Phys. Lett. 85, 4881 (2004). https://doi.org/10.1063/1.1825617
A. Meyer, J. Horbach, O. Heinen, D. Holland-Moritz, T. Unruh, Defect Diffus. Forum 289–292, 609 (2009). https://doi.org/10.4028/www.scientific.net/DDF.289-292.609
D. Holland-Moritz, S. Stüber, H. Hartmann, T. Unruh, T. Hansen, A. Meyer, Phys. Rev. B 79, 064204 (2009). https://doi.org/10.1103/PhysRevB.79.064204
D. Holland-Moritz, S. Stüber, H. Hartmann, T. Unruh, A. Meyer, J. Phys. Conf. Ser. 144, 012119 (2009). https://doi.org/10.1088/1742-6596/144/1/012119
F. Yang, D. Holland-Moritz, J. Gegner, P. Heintzmann, F. Kargl, C.C. Yuan, G.G. Simeoni, A. Meyer, EPL 107, 46001 (2014). https://doi.org/10.1209/0295-5075/107/46001
M.D. Ruiz-Martín, D. Holland-Moritz, F. Yang, C.C. Yuan, G.G. Simeoni, T.C. Hansen, U. Rütt, O. Gutowski, J. Bednarčík, A. Meyer, J. Non-Cryst. Solid X 16, 100131 (2022). https://doi.org/10.1016/j.nocx.2022.100131
Acknowledgments
We wish to gratefully acknowledge the careful review of the manuscript by Dr. G. Bracker.
Funding
Open Access funding enabled and organized by Projekt DEAL. This work received no direct funding.
Author information
Authors and Affiliations
Contributions
JB contributed toward coordination; JB, DHM, and FY contributed toward writing.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Special Issue on Transport Property Measurements in Research and Industry: Recommended Techniques and Instrumentation.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Brillo, J., Yang, F. & Holland-Moritz, D. Transport Property Measurement of Liquid Metals and Alloys Using Electromagnetic and Electrostatic Levitation. Int J Thermophys 45, 17 (2024). https://doi.org/10.1007/s10765-023-03309-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10765-023-03309-9