
Abstract
The recent global trend toward decarbonization is also occurring in the maritime industry and there is an urgent need to improve the fuel efficiency of ships. Various energy-saving devices (ESDs) are adopted for this purpose. However, because of the difference in the boundary layer thickness between full-scale and model-scale, it is difficult to estimate the actual performance of ESDs in a tank test. As a solution to overcome this difficulty, the Boundary Layer Similarity model (BLS model) is proposed in which only the stern part of the hull is extracted to shorten the model length and to make its boundary layer thickness equivalent to that of a full-scale ship. By using this BLS model, the performance of ESDs on a full-scale can be estimated in a model test. In the present paper, the applicability of the BLS model is investigated by CFD (Computational Fluid Dynamics) simulations of performance estimation of an energy-saving fin in different locations for a bulk carrier. It is found that the BLS model is capable of predicting the full-scale performance of the fins by the model-scale simulations. Moreover, the flow fields affected by the fins with the BLS model are similar to those of full-scale. It is expected that the use of the BLS model enables the prediction of the full-scale performance of ESDs in a model test.
Similar content being viewed by others


1 Introduction
Because of the difficulty of building prototypes in their actual size in ship design, the extrapolation methods for estimating actual ship performance from tank tests using a scale model have been used for many years. A major limitation of this procedure is that both the Reynolds number Re and the Froude number Fr cannot be matched together between full-scale and model-scale.
Therefore, in tank tests, the wave-making resistance component is estimated by matching Fr between full-scale and model-scale and the viscous resistance component depending on Re is estimated by considering the scaling effect. The vast accumulation of tank test data and actual ship data establish the correlation allowance and make it possible to estimate propulsive performance, including resistance, self-propulsion factors and required engine power with practical accuracy.
On the other hand, the recent social trend toward decarbonization requires further improvement in the energy-saving performance of ships. The Energy Efficiency Design Index (EEDI) regulation set by IMO (International Maritime Organization) [1] is one of these efforts. EEDI is defined by the estimated number of grams of CO2 per transport work (tonne-mile). EEDI regulation requires efficiency improvements from ships built between 1999 and 2008. Phase 2 of EEDI, which is currently implemented requires efficiency improvements of at least 20% and phase 3 requires improvements of at least 30%. In addition, the Marine Environment Protection Committee (MEPC) of the IMO held in 2021 [2] adopted a more stringent target that “aims to reduce the carbon intensity of international shipping by 40% by 2030, compared to 2008”. The decarbonization of the maritime sector will accelerate in the future. There are several ways to promote energy conservation of ships, including hull and/or propeller optimization. In particular, various types of energy-saving devices (ESDs) are commonly adopted for commercial ships.
The biggest problem associated with the design of ESDs such as fins installed in the boundary layer of a ship stern is that Re differs by one to three orders of magnitude between full-scale and model-scale. The boundary layer thickness is not similar between the two scales. For example, in the case of the Japan Bulk Carrier (JBC) hull form used in the present study, the boundary layer thickness scaled by a ship length at the stern is approximately three times as thick in model-scale as in full-scale. In tank tests, a fin height is sometimes increased to account for the difference of boundary layer thickness, which means that the shape of the device is different from the actual one. It makes the accurate performance estimation rather difficult and there have been cases where ESDs that are effective in model-scale experiments do not work properly on actual vessels. Actually, Ikenoue et al. [3] showed that the energy-saving duct designed using model-scale simulation and the scaling-up procedure works differently from that designed using full-scale simulation.
Another situation in which the similarity of the boundary layer or wake between model-scale and full-scale is problematic is a propeller cavitation test. Since the cavitation pattern is strongly affected by non-uniform inflow, the reproduction of full-scale wake flow in a model test is crucial. To deal with this difficulty, modifications of a hull form to generate flows similar to an actual ship have been proposed. Schuiling et al. [4] proposed a special model ship called “Smart Dummy” which is inversely designed to generate a full-scale wake field of a target ship. The geometrical similarity is lost between the re-designed and the original hulls. They demonstrated that the wake, propeller cavitation and pressure fluctuations are similar to available full-scale data. Later, Guo et al. [5] adopted the same “Smart Dummy” concept for the full-scale wake reproduction of a container ship and wake fields of “Smart Dummy” and a full-scale ship are compared using CFD (Computational Fluid Dynamics) analysis. Kimura et al. [6] conducted experiments in a cavitation tunnel using a special model called “Smart Wake Ship” the design method of which is similar to that of “Smart Dummy” except that the geometry in the stern is kept unchanged as much as possible. They succeeded in reproducing the wake flow of a full-scale ship estimated by CFD in the model test. Cavitation tests were also carried out with flow liners which are the devices installed on a cavitation tunnel wall to guide flow direction inside a tunnel to further assist the reproduction of full-scale wake. Both “Smart Dummy” and “Smart Wake Ship” concepts aim to reproduce full-scale wake for propeller cavitation using a model with modified length and shape. However, these methods cannot be applied in a straightforward way to the performance estimation of full-scale ESDs due to the loss of geometrical similarity in “Smart Dummy” and the missing powering procedure in “Smart Wake Ship”.
It is also possible to apply boundary layer control methods such as boundary layer suction. Although the boundary layer suction method has been studied for many years, the construction of such a model becomes complicated and the calibration of the amount of suction to reproduce the full-scale wake field needs much effort.
In the present study, a method for estimating the full-scale performance of ESDs in a model test is proposed. In the proposed method, a Boundary Layer Similarity (BLS) Model is constructed by taking out only the stern part of a target ship without modification and reducing the total length of a model ship. A BLS model is conceived to reproduce the thickness of the boundary layer of a model ship in a tank test similar to that of a real ship without the use of flow liners. A BLS model can be used to estimate the full-scale performance of ESDs from a tank test with geometrically similar ESDs. Since the stern part retains geometric similarity, ESDs of the exact shape can be installed in the exact locations.
The paper is organized as follows. First, the design strategy of the BLS model and analysis method for performance estimation is described. Then the target ship and ESDs of the present study are presented. This is followed by the explanations of the numerical method, the flow conditions and the computational grids. After the verification of the CFD result is presented, the appropriate fore body shape for the BLS model is selected based on CFD simulation. In the following section, the numerical results for various fin locations are discussed including resistance and self-propulsion factors, stern flow fields, vortex structures and propeller inflows. Conclusions of the present study are summarized at the end.
2 Boundary layer similarity model
In order to reproduce the boundary layer thickness of a full-scale ship in model-scale, the length of a BLS model should be set shorter.
A BLS model is constructed by taking out the stern part of a full-length model to maintain the geometric similarity of the stern where ESDs are supposed to be fit and a fore-body is attached to smoothen a flow. The concept of a BLS model is shown in Fig. 1.

Concept of a Boundary Layer Similarity (BLS) model
The design strategy for the determination of the length of a BLS model is as follows. For an actual ship with a length L and a speed U, the Reynolds number is defined as
with \(\nu _s\) being the kinematic viscosity of a ship flow. The boundary layer thickness \(\delta _s\) along a hull is estimated using the formula for a flat plate based on the 1/7th power law of the velocity as
where x is the distance from a leading edge or a fore-end.
Thus, the boundary layer thickness at the aft-end, \(x=L\), is
For a model with a length l and a speed u, the Reynolds number of a model is
with \(\nu _m\) being the kinematic viscosity of a model flow.
A BLS model is composed of the extracted aft part with the added fore part. The length of a BLS model, reduced from the full-length model, is assumed to be \(\alpha l\) where \(\alpha\) is the reduction rate (\(0<\alpha <1\)).
The boundary layer thickness at the aft-end of a BLS is estimated by Eq. 3 as
This boundary layer thickness scaled by the original model length l is
This is set equal to the scaled boundary layer thickness of the ship as
which yields
or
Equation 9 provides the relation among u, l and \(\alpha\).
In the case that u is determined following Froude’s similarity law as
then,
that is,
If Froude’s similarity is not used, the length of a BLS model can be set arbitrarily from Eq. 9 with the appropriate model speed.
It is noteworthy that the flow with surface roughness would be a better approximation of full-scale flow. When the surface roughness model is considered in full-scale simulation, the boundary layer thickness distribution of a flat plate (Eqs. 2 and 3) used to determine the BLS length must be replaced by that with surface roughness (which can be obtained by the CFD simulation).
3 Performance analysis method
Since a BLS model is a short-length model with the stern part of the original hull taken out, it is difficult to estimate the propulsive performance in a usual way. An analysis method for a BLS model is described in the following.
As a basis, full-scale CFD simulations are carried out for the reference of the performance of an actual ship. The resistance is obtained by a calculation with the full-scale Reynolds number. Surface roughness is not taken into account in this stage. Instead, roughness allowance \(\Delta C_F\) is considered in a self-propulsion simulation and thrust in full-scale \(T_\text {full}\) is balanced with the sum of the computed resistance of self-propulsion condition \(R_\text {SP,full}\) and roughness allowance as follows:
where \(\rho _s\), \(U_s\) and \(S_s\) are seawater density, ship speed and wetted surface area of an actual ship.
In model-scale, a resistance computation adopts the model-scale Reynolds number. A self-propulsion simulation considers the skin friction correction SFC including the roughness allowance \(\Delta C_F\) for a thrust at a ship point, \(T_\text {m}\):
where \(R_\text {SP, model}\) is the resistance of self-propulsion condition in model-scale. SFC is defined as
where \(C_t=R_t/0.5\rho U^2S\) (\(\rho\), U and S are water density, ship speed and wetted surface area of the individual case) is the resistance coefficient in towing condition and \(\rho _m\), \(U_m\) and \(S_m\) are freshwater density, ship speed and wetted surface area of a model ship.
In a BLS model, the resistance in towing condition \(R_\textrm{Tow}\) is smaller than that of a model, since a BLS model is shortened from a full-length model. The resistance difference \(\Delta R\) between a BLS model and a full-length model in towing condition is defined as
In a self-propulsion simulation, thrust at a ship point, \(T_\text {BLS}\), is estimated by adding \(\Delta R\) above to resistance in self-propulsion condition of a BLS model, \(R_\text {SP,BLS}\):
where SFC on the right-hand side should be the same value as a full-length model defined in Eq. 16. \(\Delta R\) of a bare hull case is used even for cases in which ESDs are adopted, since the resistance increase due to ESDs is already included in \(R_\text {SP,BLS}\).
Based on the thrust setting above, thrust deduction coefficient in each case are evaluated in the following way: for a full-scale ship,
for a full-length model ship,
and for a BLS model,
Next, the effective wake coefficients \((1-w_T)\) are obtained using the thrust identity method. A wake of a ship is known to have a significant scale effect due to the difference of the Reynolds numbers between full-scale and model-scale. Therefore, the scaling-up procedure is needed for the model-scale simulation, while the full-scale value can be estimated directly by the full-scale simulation. In the present study, Yazaki’s method [7] is adopted for the scaling-up, in which the wake ratio \(e_i\) is obtained from the correlation database using the length, the width and the aft draft of a ship and the full-scale wake coefficient is estimated by
In the case of a model with ESD, the method proposed by Kawashima et al. [8] is applied. First, the wake difference due to ESD, \(\Delta w\), is evaluated using the difference of the wake coefficients between a bare hull and with ESD in model-scale as
Assuming that the difference of the wake coefficient \(\Delta w\) is constant regardless of scale, the wake coefficient with ESD in full-scale can be estimated using \(e_i\) above and \(\Delta W\) as
In a BLS model, since a stern flow can be considered to be equivalent to flow in full-scale, there is no need to modify the wake coefficient both in a bare hull and with ESD conditions.
4 Hull form and ESD design
4.1 Hull
As a target ship of the present study, Japan Bulk Carrier (JBC) is selected. JBC is a benchmark hull form of a Cape-size bulk carrier [9], which was adopted as one of the test cases in CFD Workshop Tokyo 2015 [10]. The principal particulars of JBC are listed in Table 1 for two scales: full-scale (\(L_\textrm{PP} = 280\) m) and model-scale (\(L_\textrm{PP} = 10.97\) m, which is determined in conjunction with a BLS model as stated below). The CAD geometry and the body plan are shown in Figs. 2 and 3, respectively. The design speed is 14.5 knot and it corresponds to the Froude number of \(Fr = 0.142\).

CAD geometry of JBC

Body plan of JBC
4.2 Propeller
The propeller used is a conventional five-bladed propeller of the MAU type. The particulars of the propeller and its location are listed in Table 2. The measured open water characteristics of the model propeller[9] are shown in Fig. 4 together with the numerical data of the current propeller model shown in the following section.

Open water characteristics of propeller model
4.3 Energy-saving fin
An energy-saving fin is used as an ESD in the present study. Dimensions of a fin are listed in Table 3 and its CAD geometry is depicted in Fig. 5. Yamashita et al. [11] found that when a fin is installed on only the port side of a ship with a single propeller in clockwise rotation, a vortex generated at the tip of a fin improves hull efficiency better than the case with two fins installed on both sides. Therefore, a single fin is installed at a total of five locations on the port side as shown in Fig. 6 and the effect of these fin locations is examined. The leading edges of Fin1 and Fin2 are placed at 92.5% of \(L_\textrm{PP}\) aft, Fin3 and Fin4 at 87.5% and Fin5 at 82.5%. For the vertical location, Fin1 and Fin3 are at 90% of the draft, while Fin2, Fin4 and Fin5 are at 80%. All fins are horizontally set in the x-direction and inclined 30 degrees downward for Fin1, Fin2 and Fin3 and 45 degrees downward for Fin4 and Fin5.

CAD geometry of fin

Side view of five fin positions (Fin1–Fin5) on the Port side
4.4 BLS models
The length of a BLS model for the JBC hull is determined following the strategy shown above. For the full-scale ship, from the length \(L_\textrm{PP} = 280\) m and the design speed \(U_S = 7.46\) m/s, Reynolds number is computed as \({Re}_{s} = 1.76 \times 10^{9}\) based on the kinematic viscosity \(\nu _s=1.1892\times 10^{-6}\) m\(^2\)/s. The boundary layer thickness at AP is calculated from Eq. 3 as
The reduction rate of a BLS model is set to \(\alpha = 0.3\), that is, the length of a BLS model is 30% of a full-length model, considering the range of fin locations shown in Fig. 6. The model-scale Reynolds number \({Re}_{m}\) and ul are obtained from Eqs. 8 and 11, respectively, as
where the model-scale kinematic viscosity is assumed \(\nu _m=1.1386\times 10^{-6}\) m\(^2\)/s.
The length of a full-length model l and model speed u is set from the Froude’s similarity as
using Eqs. 13 and 11, respectively. Finally, the BLS model length is set as
Reynolds number for the BLS model of 3.29 m is \(4.2 \times 10^6\), which is high enough to maintain the turbulence with a proper tripping device in tank test. CFD computations of the BLS models also assume a fully turbulent flow.
In order to examine the effect of fore-bodies of a BLS model, three BLS models (Mk03, Mk04 and Mk05) as shown in Fig. 7 are designed. The stern parts of all three models are identical and 20% \(L_\textrm{PP}\) of the stern of the full-length model is extracted. The length of a fore-body is 10% \(L_\textrm{PP}\) to make a total length 30% \(L_\textrm{PP}\). A fore-body of Mk03 has a vertical stem line with a circular connection to the baseline and a smooth surface connects the stem line and the aft body. The stem line of Mk04 is tilted 15 degrees forward from that of Mk03. For Mk05, the bow part with a bulbous bow is taken from the full-length model and used as a fore-body.

Geometries of Mk03 (Top), Mk04 (Middle) and Mk05 (Bottom)
5 Numerical method
5.1 Solvers
As a flow solver, NAGISA 3.34[12] developed at National Maritime Research Institute is adopted. NAGISA numerically solves the incompressible Reynolds-averaged Navier–Stokes equations with a finite-volume method in a structured grid. For the spatial discretization, the third-order upwind scheme is used for inviscid terms and the second-order central differencing for viscous terms. Velocity-pressure coupling is achieved via pseudo-compressibility. A steady-state solution is obtained using the Euler implicit scheme for the time integration and dual-time stepping with the second-order time scheme enables an unsteady solution as well. The solver can calculate double model flows or free surface flows with the single phase level set method. Various turbulence models such as the k-\(\omega\) SST model and various propeller models using the body force approach are implemented. The solver has the capability of handling an overset grid method for complex geometry. Applications for full-scale ship of NAGISA have been validated in several cases (see Sakamoto et al.[13] and Ohashi [14], for instance).
The grid generation and the grid assembly for overset grid blocks are performed using UP_GRID[15] also developed at National Maritime Research Institute.
5.2 Flow conditions
Since the design Froude number listed in Table 1 is as small as 0.142, free surface effect is negligible and a double model flow approximation is applied. Reynolds numbers are \(1.76\times 10^9\) for the full-scale ship and \(1.42\times 10^7\) for the full-length model and the BLS model. Although the length of the BLS model is shorter than the model, the representative length is set equal to the full-length model and the same Reynolds number is applied. The EASM (Explicit Algebraic Stress Model, based on the k-\(\omega\)-BLS model) is used for turbulence closure. A body force propeller model based on the simplified propeller theory [16] is used for self-propulsion calculations. The accuracy of the present propeller model is confirmed from Fig. 4, where the measured and computed open water characteristics show reasonable agreement. Since self-propulsion factors of all cases are estimated using the same computed characteristics, the small differences between measured and computed characteristics do not affect the results of relative comparisons. For the roughness allowance, \(\Delta C_{F} = 1.200 \times 10^{- 4}\) is used following Hino et al.[9].
5.3 Computational grids
The computational grids are generated using UP_GRID [15] and the commercial software Pointwise. For the coordinate system, a left-hand coordinate system nondimensionalized by \(L_\textrm{PP}\) with the origin at FP, center line and still water level is used. The x-axis is in the fore-to-aft direction, the y-axis is in the starboard direction and z-axis is in the upward direction. The size of the computational domain is set to
following the ITTC Guidelines [17, 18]. The domain size is the same for all cases though a BLS model is shorter than the other models.
Since the JBC hull form has a distinctive stern tube, it is necessary to generate a grid for the stern tube block separately from a main hull block. The fin grid is also generated separately since the location of the fin varies with cases. Then, an overset grid technique is applied for flow computations. The overall view of the computational grid is shown in Fig. 8 and the stern tube grid and the fin grid are shown in Figs. 9 and 10, respectively. The minimum spacings on solid walls are set to \(1.0\times 10^{-8}\) for the full-scale ship and \(1.0\times 10^{-6}\) for the model ship and the BLS model which satisfy the solver requirement for the near-wall treatment without a wall function. The numbers of grid cells for each block are listed in Table 4. Although the minimum spacings are different between different scales, the number of cells is kept fixed except for the stern tube block. Figure 11 depicts the view of the overset grid in the case of a BLS model. The blue lines indicate the hull block, the black lines are for the stern tube block and the magenta lines are for the fin block.

Total view of computational grid

Stern tube grid

Fin grid

Overset grid for BLS model
6 Results and discussions
6.1 Verification of numerical solutions
Before the performance analysis of the BLS, an uncertainty analysis of the numerical solutions is performed. The procedure follows ITTC Recommended Procedures and Guidelines [19] and the Factor of Safety Method [20]. The iterative uncertainty \(U_I\) is assumed to be small since the present computations are for a steady state flow and only the grid uncertainty \(U_G\) is concerned. Three grids, fine, medium and coarse grids with the grid refinement ratio \(r=\sqrt{2}\), are used for the grid convergence study.
The test case is a bare hull without a fin and it requires the overset grids of the hull grid block and the stern tube grid block. The cell numbers of three grid sets for the full-scale ship, the model ship and the BLS model (Mk05) are summarized in the Table 5.
Three solutions obtained with coarse, medium and fine grids are denoted as \(S_3\), \(S_2\) and \(S_1\), respectively. The solution changes \(\epsilon\) between two grids and the convergence ratio \(R_G\) are defined as
In the case of \(0<R_G<1\), the solutions are in the monotonic convergence and the generalized Richardson extrapolation method is used to obtain the estimated order of accuracy \(p_\textrm{RE}\) and the error \(\delta _\textrm{RE}\) as
The distance metric to the asymptotic range P is defined as
where \(p_\text {th}\) is the theoretical order of accuracy of the solver and is equal to 3 in the present case. Finally, the grid uncertainty is estimated as
In the case of \(R_G<0\), the solutions are in the oscillatory convergence and the grid uncertainty is estimated as
(In some literature [21], \(R_G<-1\) is defined as the oscillatory divergence.) \(R_G>1\) indicates that the solutions are diverging with respect to the grid refinement and the uncertainty analysis is not possible.
The integral values selected for the analysis are the total resistance coefficient \(C_{t}\) and the nominal wake coefficient \(1-w_n\) in towing condition, the wake coefficient \(1-w_T\) and the thrust deduction coefficient \(1-t\) in self-propulsion condition. Note that \(1-w_T\) of the model-scale is scaled up to the full-scale value with Yazaki’s method [7] where the wake ratio \(e_i=1.2329\). The same procedure is applied for \(1-w_n\) of the model-scale.
The analysis results are listed in Tables 6, 7 and 8 for the full-scale ship, the model ship and the BLS model, respectively.
The analysis results in Tables 6 and 7 show that the full-scale and model-scale solutions have sufficient accuracy for all the values. The solutions show monotonic or oscillatory convergence and the associated grid uncertainty values are below 2.5% of the fine grid solutions. On the other hand, solutions for the BLS model in Table 8 show the monotonic convergence for \(C_{t}\) and \(1 - t\) and the divergence for \(1-w_n\) and \(1 - w_T\). The grid uncertainty values are 5% of the fine grid solution at most and \(\epsilon _{21}\) of the wake coefficients can be considered to be sufficiently small. Therefore, the current fine grids are adopted for the further analysis. Note that in the overset grid computations like the present case, solutions often do not show the asymptotic convergence due to the complex grid interactions of the overset grids.
6.2 Comparison of BLS models with different fore-bodies
For the BLS model, three shapes Mk03, Mk04 and Mk05 with the different fore-bodies are designed as shown in Fig. 7. The comparison of the three BLS models is carried out to examine the effect of fore-body shape. The resistance coefficients in towing condition are summarized in Table 9 where the total resistance coefficient \(C_t\) together with the pressure resistance component \(C_{p}\) and the frictional resistance component \(C_{f}\) are listed. In addition, the wetted surface area \(S/L_\textrm{PP}^2\) is also shown for reference. The self-propulsion factors estimated with the procedure described in Sect. 3 are summarized in Table 10 where the thrust deduction coefficient \(1 - t\), the wake coefficient \(1 - w_T\) and the hull efficiency \(\eta _{H}\) are listed.
The resistance coefficients in Table 9 show Mk03 has the largest resistance and Mk05 has the smallest even after considering the difference of the wetted surface areas. The resistance of Mk04 is at the same level as Mk03. The low resistance of Mk05 comes from the decrease of both the pressure and frictional resistance, indicating that the bulbous bow of Mk05 has an effect of resistance reduction by streamlining a flow. Table 10 shows no significant differences between the models except for \(1 - w_T\) in which Mk05 is the largest.
To compare the velocity distributions at the stern, the x-velocity distributions of the propeller plane (\(x/L_\textrm{PP}=0.9857\)) and the center plane \(y/L_\textrm{PP}=0.000\) in towing condition are plotted in Fig. 12. For comparison, the full-scale and the model-scale plots are also included. The circle in the propeller plane represents the propeller disk.
The wake of the model-scale is rather thicker than that of the full-scale as expected. In general, all three BLS models (Mk03, Mk04, and Mk05) successfully generate the wakes closer to those of the full-scale ship. Also, the velocity distributions at the center plane of three BLS models are closer to that of the full-scale ship while the model-scale generates the thicker boundary layer under a bottom. It is noticeable that there are accelerated regions under the bottom of the BLS models. They comes from the high speed turning flow at the bow bottom and do not dissipate due to the shortened hull of the BLS models.
Comparison among the BLS models reveals that the Mk03 and Mk04 models without a bulbous bow have thicker wakes on both sides of the stern tube compared with that of the Mk05 model. This suggests that a bulbous bow affects the stern flow field.
From these results, it can be concluded that the flow field of Mk05 is closest to that of the full-scale. Therefore, Mk05 is adopted as the BLS model in the following analysis.

x-velocity distributions and cross-flow vectors at propeller plane \(x/L_\textrm{PP}=0.9857\) (right) and x-velocity distributions at center plane \(y/L_\textrm{PP}=0.0000\) (left) in towing condition, full-scale, model-scale, Mk03, Mk04 and Mk05 from top to bottom
6.3 Resistance and self-propulsion factors in fin conditions
A total of six cases, the bare hull and the hulls with five fin locations shown in Fig. 6, are analyzed.
The resistance coefficients in towing condition is summarized in Fig. 13. The resistance coefficients of the model-scale is larger than other cases as expected from the Reynolds number difference. Interestingly, \(C_t\) values of the BLS model are at the same level as the full-scale ship. This is reasonable since the wake fields of the BLS models are intended to be close to that of the full-scale ship, which means the resistance is similar when the momentum integration is applied.
It can be seen that \(C_{t}\) increases when the fins are attached in all cases and \(C_{t}\) increases the most in the Fin2 condition. The trend of the resistance increases in fin conditions is similar among the full-scale, model-scale and BLS.
The nominal wake coefficients \(1-w_n\) in towing condition are compared in Fig. 14. The full-scale ship and the BLS model show similar trend and the values are in the same level, while the up-scaled model-scale values show the slightly higher values than the other two. Improvement of \(1-w_n\) from the bare hull condition are shown in Fig. 15. The BLS model follows the general trend of the full-scale except the Fin1 condition for which the full-scale shows the decrease while the BLS shows slight increase. The model-scale fails to predict the full-scale’s large improvement of \(1-w_n\) in Fin2 condition. Flow physics behind these features are further discussed in the following section using the velocity plots.
The nondimensional thrusts \(T/0.5\rho U^2S\) in self-propulsion condition are summarized in Fig. 16. The thrusts of the model-scale are at the same level as the full-scale due to the SFC correction for the ship point self-propulsion. The thrusts of the BLS models adjusted using a newly devised method in Sect. 3 are also close to those of the other cases. It turns out that the propeller loading can be set equivalent to that of the model-scale at the ship point by the proposed thrust adjustment method.

Resistance coefficients \(C_t\) of fin conditions in towing condition

Nominal wake coefficients \(1-w_n\) of fin conditions in towing condition

Comparison of \(1-w_n\) improvements in towing condition

Nondimensional thrusts of fin conditions in self-propulsion condition
Next, computed self-propulsion factors of five fin conditions are compared. The thrust deduction coefficients \(1-t\), the wake coefficients \(1-w_T\), the hull efficiencies \(\eta _H=(1-t)/{(1-w_T)}\) and relative rotative efficiencies \(\eta _R\) are shown in Figs. 17, 18, 19 and 20. The wake coefficients of the model-scale are scaled up by Yazaki’s method[7] with \(e_{i} = 1.2329\) and the method of Kawashima et al. [8].
For \(1-w_T\), there are no significant differences in the values among the three cases. It indicates that the thrust deduction estimation for BLS models shown in Eq. 21 works well. In all fin conditions, though the installations of a fin improve the \(1 - t\) values, the amounts of improvements tend to be smaller in the model-scale compared to the full-scale and the BLS model.
In terms of \(1 - w_T\), the full-scale and the BLS model improve \(1 - w_T\) in all fin conditions compared to the bare hull condition. In the model-scale, although \(1 - w_T\) is improved except for the Fin1 condition, the amount of improvement is smaller than in the other two cases. Note that \(1-w_T\) values are different from those of \(1-w_n\) of Fig. 14 due to the scaling-up.
The hull efficiencies \(\eta _H\) of the BLS models show the same trend as the full-scale. The model-scale behaves differently from the other two cases. Also, the improvements from the bare hull condition are smaller in the model-scale.
The relative rotative efficiencies \(\eta _R\) of the model-scale are, in general, larger than the full-scale and the BLS model. Other than that, no clear trend can be found in the full-scale and the BLS model.

Thrust deduction coefficients \(1 - t\) of fin conditions

Wake coefficients \(1 - w_T\) of fin conditions

Hull efficiencies \(\eta _{H}\) in fin conditions

Relative rotative efficiencies \(\eta _{R}\) in fin conditions
In order to shed light on the effect of fins, the improvements of self-propulsion factors of fin conditions from a bare hull are analyzed.
The amounts of improvements in \(1 - t\) are shown in Fig. 21. In the case of the full-scale, the range of the improvements is about the same except for the Fin5 condition. In the model-scale, the range of improvements is in general smaller than the full-scale and the trend is completely different from that of the full-scale. In the BLS model, the range of improvements is slightly larger than the full-scale. The trend is more similar to the full-scale except that the Fin1 condition shows a smaller improvement.

Comparison of \(1 - t\) differences
The comparison of improvements in \(1 - w_T\) is shown in Fig. 22. The full-scale and the BLS model show a similar trend in the amounts of improvements. In particular, the Fin2 condition shows a prominent improvement, showing a clear difference from the other fin conditions. On the other hand, \(1 - w_T\) in the model-scale deteriorates in the Fin1 condition and there are little differences in the amount of improvement in the other four fin conditions. Clearly, the model-scale does not reproduce the characteristics of the full-scale.

Comparison of \(1-w_T\) improvements
The amounts of improvements for the hull efficiencies \(\eta _{H}\) is shown in Fig. 23. The amounts of improvements in the full-scale and the BLS model show a similar trend. Although it is not a perfect match of the order of improvements, the largest improvement of Fin2 followed by Fin4 and Fin3 in the mid-range and the least ones Fin5 and Fin1 are common between the full-scale and the BLS.
In summary, it turns out that the BLS model can be used to estimate the full-scale performance using a scaled model in a tank test. In particular, the superiority or inferiority of the fin locations may be effectively determined which is useful in the design stage of ESDs.

Comparison of \(\eta _{H}\) differences
6.4 Stern flow fields in fin conditions
Stern flow fields of the full-scale, the model-scale and the BLS model are compared for the five fin conditions.
Figures 24, 25, 26, 27 and 28 show the x-velocity distributions and cross-flow vectors at the section near the trailing edge of each fin (\(x/L_\textrm{PP}\) = 0.950 for Fin1 and Fin2, \(x/L_\textrm{PP}\) = 0.900 for Fin3 and Fin4, \(x/L_\textrm{PP}\) = 0.850 for Fin5) and the propeller plane (\(x/L_\textrm{PP}\) = 0.9857). In all conditions, the boundary layer thickness along the hulls of the BLS models is thinner than the model-scale and closer to those of the full-scale,
Figure 24 shows the Fin1 condition where the fin is located at \(x/L_{pp}\) = 0.925 and |z|/T = 0.800. At the trailing edge section, the wakes of the fin and the low-velocity spots corresponding to the tip vortex of the fin are visible, though more diffused in the model-scale than in the full-scale and the BLS model. In the propeller plane, the effect of the fin vortex appears as the low-velocity regions in the port side of the propeller disk. This fin effect interacts with the ’hook’ shape wake of the bare hull originating from the bilge vortices and smears the low-velocity regions in the propeller plane. As a result, the wake gains are low in the Fin1 condition as shown in Fig. 22.
For Fig. 25, in the Fin2 condition where the fin is at \(x/L_{pp}\) = 0.925 and |z|/T = 0.900, the low or reversed velocity regions colored blue are distributed on the upper surface of the fin in the full-scale and the BLS model, suggesting strong flow separations in the trailing edge section. It is different from the Fin1 condition above maybe because the local flow direction of Fin2 is more upward than Fin1. On the other hand, the low-velocity region of the model-scale is smaller compared to the full-scale and the BLS model. This is due to the thicker boundary layer of the model-scale which means the flow around the fin is slower than in the other cases. In the propeller plane, the full-scale and the BLS model produce similar flow fields in which the low-velocity regions generated at the fins flow into a propeller disk, while the low-velocity region in the model-scale is halfway out of the propeller disk. The low-velocity core due to the fin is at the side of the stern tube and the strong interaction with the ’hook’ shape wake seems to be avoided, which yields the large wake gain of Fin2 as shown in Fig. 22.
Figure 26 shows the Fin3 condition where the fin is at \(x/L_\textrm{PP}=\) 0.8750 and |z|/T = 0.800. At the trailing edge section, \(x/L_\textrm{PP}\) = 0.900, the boundary layer is thinner than \(x/L_\textrm{PP}\) = 0.9500 section above. The wakes of the fin and the tip vortex cores can be observed in a similar way as Fig. 24. At the propeller plane, the low speed regions due to the fin are far above the propeller disk and the velocity inside the propeller disk is less affected compared with the Fin2 condition, resulting in the moderate wake gains in Fig. 22.
In Fig. 27, the Fin4 condition where the fin is located at \(x/L_\textrm{PP}=\) 0.8750 and |z|/T = 0.900 is depicted. At the trailing edge section, the boundary layer thickness is the same as Fig. 26. The effect of the fin is also similar to the Fin 3 condition except that the location of the low region is lower. At the propeller plane, though the fin wake is located lower than the Fin3 condition, the effect inside the propeller disk is similar to the Fin3 condition. The wake gain in Fig. 22 also shows a moderate improvement.
Figure 28 is for the Fin5 condition where the trailing edge section is further upstream at \(x/L_\textrm{PP}\) = 0.8500. The boundary layers of the full-scale and the BLS model are very thin and the wakes of the fin are present. In the model-scale, both the boundary layer and the fin wake are thicker than in the other two cases. At the propeller plane, the influence of the fin vortex is diffused in all cases and the effect of the fin on the propeller inflow is smaller than the Fin1 to Fin4 conditions. This causes the smaller wake gain in Fig. 22. This is somewhat different from the result by Yamashita et al. [11] in which the larger wake gain was obtained for a similar fin location in the model-scale. This may be because of the numerical diffusion since the fin is located far upstream of the propeller plane. The simulation with the grids finer than the present case may be needed. This is one of the issues for future study.

x-velocity distributions and cross-flow vectors of Fin1 condition. Top: near trailing edge of fin (\(x/L_\textrm{PP}=0.9500\)), bottom: propeller plane (\(x/L_\textrm{PP}=0.9857\))

x-velocity distributions and cross-flow vectors of Fin2 condition. Top: near trailing edge of Fin (\(x/L_\textrm{PP}=0.9500\)), bottom: propeller plane (\(x/L_\textrm{PP}=0.9857\))

x-Velocity Distributions and cross-flow vectors of Fin3 Condition. Top: near trailing edge of Fin (\(x/L_\textrm{PP}=0.9000\)), bottom: propeller plane (\(x/L_\textrm{PP}=0.9857\))

x-Velocity distributions of Fin4 and cross-flow vectors condition. Top: near trailing edge of Fin (\(x/L_\textrm{PP}=0.9000\)), bottom: propeller plane (\(x/L_\textrm{PP}=0.9857\))

x-Velocity distributions and cross-flow vectors of Fin5 condition. Top: near trailing edge of fin (\(x/L_\textrm{PP}=0.8500\)), Bottom: Propeller Plane (\(x/L_\textrm{PP}=0.9857\))
To further assess the fin effects quantitatively, the energy balance analysis method [22, 23] is applied, in which the delivered power of a ship is decomposed into the fluxes of internal energy and turbulent kinetic energy, pressure work, transverse kinetic energy losses and axial kinetic energy fluxes. Here, following Sakamoto et al. [23], the axial and transverse energy fluxes are considered in the control surface at the propeller plane. Total kinetic energy flux \(K_\textrm{tot}\) through a control surface is expressed as the sum of the axial energy flux \(K_\textrm{ax}\) and the transverse energy flux \(K_\textrm{tr}\), i.e.,
while \(K_\textrm{ax}\) and \(K_\textrm{tr}\) are defined as
where \(S_{\Omega }\) is the area of the control surface which is set as a circular disc with the diameter of \(d/L_\textrm{PP}=0.05104=1.76D_P\) (\(D_P\) is the propeller diameter) placed in the propeller plane (\(x/L{PP}=0.9857\)). \((u_x, u_y, u_z)\) is the local velocity vector in x, y and z directions and U is a ship speed.
Figure 29 shows the comparison of the kinetic energy fluxes of a bare hull and five fin conditions for the full-scale, the model-scale and the BLS model. In the full-scale case, both axial and transverse energy fluxes of five fin conditions increase from the bare hull, indicating the low speed region and the vortical motion are generated by the fins as observed in Figs. 24 to 28. Fin2 condition shows the maximum increase, which is consistent with the smallest nominal wake in Fig. 14. In the model-scale case, though the general trend is the same as the full-scale, the axial energy fluxes \(K_\textrm{ax}\) are larger while the transverse energy fluxes \(K_\textrm{tr}\) are smaller than the full-scale. Low Reynolds number of the model-scale causes these differences due to the stronger viscous effect. The BLS model shows the good agreement with the full-scale for \(K_\textrm{ax}\) corresponding to the wider wake regions in Figs. 24 to 28. On the other hand, the transverse energy fluxes \(K_\textrm{tr}\) of the BLS are considerably larger then those of the full-scale. From the cross-flow vectors shown in Figs. 24 to 28, it is difficult to detect the clear discrepancies between the full-scale and the BLS. The examination of the local velocity reveals the cross-flow magnitudes of the BLS model are slightly larger than those of the full-scale as a whole. It is considered to be one of the reasons why the relative rotative efficiency \(\eta _R\) of the BLS model does not follow the trend of the full-scale ship as shown in Fig. 20. This may be because the flow development of the BLS model is still driven by the model-scale Reynolds number. It is obvious that the flow fields of BLS model cannot be identical to the full-scale flow. The present numerical study aims to indicate that BLS models can reproduce the full-scale flow reasonably well enough to estimate the propulsive performance of energy saving devices with sufficient accuracy.

Kinetic energy fluxes of fin conditions
6.5 Comparison of vortex structures
In order to further analyze how the vortices generated by the fin affect the flow fields, the stern vortex structures are visualized using the Q criterion, or the second invariant of the velocity gradient tensor, defined as
where \(\varvec \Omega\) and S are the vorticity tensor and the rate of the strain tensor, respectively. In the region where \(Q>0\), the vorticity is dominant and \(Q<0\) indicates the strain rate (viscous stress) dominates.
To detect the vorticity dominant regions, the iso-surfaces of \(Q = 500\) are plotted colored with the intensity of the helicity H (\(- 50< H < 50\)), If \(H > 0\), a counterclockwise rotation (viewed from the downstream) is present and if \(H < 0\), a clockwise rotation is present. Since the fin is attached on the port side, a clockwise rotation (negative H) is generated at the tip of the fin.
Figure 30 shows the vortex structures of the bare hull case for the full-scale, the model-scale and the BLS model. In all cases, the main vortex structures are the pair of bilge vortices on both sides of the stern tube. The distance of the pairs is wider in the model-scale compared with the full-scale, while the distance is almost the same between the BLS model and the full-scale. The location of the vortex structures is significantly affected by the boundary layer thickness at the stern.
Figure 31 is the vortex structure of the Fin1 condition. There are the vortices generated at the tip of the fin. The size of the iso-surface is largest in the full-scale and smallest in the model-scale and in-between in the BLS. The bilge vortices are torn apart inside of the fin vortices and become weak in all cases. This corresponds to the distortions of the ’hook’ shape wakes in Fig. 24.
In the Fin2 condition shown in Fig. 32, a hump-shaped vortex structure can be seen around the fin in the full-scale and BLS model, while the hump in the model-scale is not so apparent. Then, these fin vortices are merged into the bilge vortices and enlarge the pair of vortices downstream. It yields the wake gain inside the wake gain in Fig. 25.
The Fin3 and Fin4 conditions in Figs. 33 and 34, respectively, show similar vortex patterns. The fin vortices are far outside of the hull and the interactions with the bilge vortices are not so strong as the Fin2 condition. This trend is consistent with the velocity distributions in the propeller disk in Figs. 26 and 27.
In the Fin5 condition of Fig. 35, the stern vortices are almost unaffected by the fin vortices because the fin has moved further upstream than in the other four conditions. The fin vortices are rather weak and the bilge vortices are hardly affected by the fin vortices. The velocity distributions in Fig. 28 also show no significant velocity change due to the fin. Note that the numerical diffusion may affect the behavior of the fin vortices as stated above.

Vortex structure of the bare hull condition. Iso-surface of \(Q=500\) colored by helicity

Vortex Structure of Fin1 condition iso-surface of \(Q=500\) colored by helicity

Vortex structure of Fin2 condition. Iso-surface of \(Q=500\) colored by helicity

Vortex structure of Fin3 condition. Iso-surface of \(Q=500\) colored by helicity

Vortex structure of Fin4 condition. Iso-surface of \(Q=500\) colored by helicity

Vortex structure of Fin5 condition. Iso-surface of \(Q=500\) colored by helicity
6.6 Analysis of velocity distribution at propeller plane
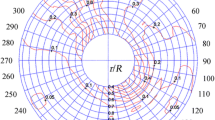
To analyze further the effects of fins on the propeller inflow, the computed velocities in towing condition are interpolated into the circumference of the radius \(0.7 R_p\) of the propeller disk where \(R_p\) is the propeller radius. Figures 36, 37, 38, 39 and 40 show the x-velocity and the circumferential velocity (\(\theta\)-velocity) distributions for Fin1 to Fin5 conditions, respectively, where the angle \(\theta\) is counterclockwise with 0\(^{\circ }\) at the top, 90\(^{\circ }\) at the starboard, 180\(^{\circ }\) at the bottom and 270\(^{\circ }\) at the port.
In all cases, velocities are largest in full-scale, smallest in model-scale and in-between in the BLS model. The distribution patterns of the BLS models are closer to those of the full-scale than the model-scale.
For the Fin1 condition in Fig. 36, x-velocities increase from the bare hull at this radius particularly in the port side (\(180^\circ< \theta {\ < \ } 360^\circ\)), indicating the low wake gain. The circumferential velocities do not show big differences due to the fin.
Figure 37 shows the velocities for the Fin2 condition. The decrease of x-velocities is apparent on the port side which corresponds to the increase of the wake gain. The large drops in \(180^\circ<\theta <300^\circ\) are common in the full-scale and the BLS model. The velocity of the model-scale decreases in the different location in \(270^\circ<\theta <330^\circ\). This is consistent with the wake contours in Fig. 25. The circumferential velocities decrease in the port side in the full-scale and the BLS model which yields better efficiency for a propeller with clockwise rotation. Again, the model-scale behaves differently and the differences from the bare hull are smaller.
The Fin3 and Fin4 conditions are shown in Figs. 38 and 39, respectively. The differences from the bare hull are similar for Fin3 and Fin4 as expected from the wake contours in Figs. 27 and 28. The effect of Fin4 is slightly larger than that of Fin3.
Figure 40 shows the velocities of the Fin5 condition. The differences of the velocities are quite small except for the BLS for which both velocity components decrease at the port side. The reason for this specific behavior of the BLS is not clear from the vortex structure in Fig. 35. A more detailed analysis of the flow field is needed.

Axial and circumferential velocity distributions at 0.7\(r/R_p\) for Fin1 condition

Axial and circumferential velocity distributions at 0.7\(r/R_p\) for Fin2 condition

Axial and circumferential velocity distributions at 0.7\(r/R_p\) for Fin3 condition

Axial and circumferential velocity distributions at 0.7\(r/R_p\) for Fin4 condition

Axial and circumferential velocity distributions at 0.7\(r/R_p\) for Fin5 condition
7 Conclusions
For the estimation of the full-scale performance of energy-saving devices (ESDs) in a model test, a new method that adopts a Boundary Layer Similarity (BLS) model is proposed. A BLS model is constructed by taking out the stern part of a target ship and attaching a short fore-body, which reduces the total length of a model ship and makes its boundary layer thickness geometrically similar to that of a full-scale ship. Thus, the BLS model can be used to estimate the performance of ESDs in a reproduced full-scale boundary layer in a tank test. Since the stern part retains geometric similarity, ESDs of the exact shape can be installed in their exact locations without the modification of their shapes to fit the thicker boundary layer of a model ship. The design strategy and the analysis method for a BLS model are presented to provide the information required for actual tank tests. In particular, it is shown that special care is needed for the propeller thrust setting in a self-propulsion test of a BLS model.
The feasibility of the BLS model concept is demonstrated by the CFD analysis for the bulk carrier, Japan Bulk Carrier (JBC) with an energy-saving fin. The CFD method utilized is the structured grid-based Navier–Stokes solver with overset finite volume method. After the verification of CFD results, the BLS models with different fore-body shapes are designed and examined by the comparison of computed flow fields and the self-propulsion factors. It is found that the bow part with a bulbous bow of the original model is appropriate for a fore-body of the BLS model.
The five fin locations on the port side of a hull are selected for the performance comparison. Towing and self-propulsion conditions are computed for the full-length hull with and without a fin in model-scale and full-scale. The bare hull and five fin configurations using the BLS model are also computed.
The improvement of self-propulsion factors and hull efficiency \(\eta _{H}\) from a bare hull is used as the performance index. It is found that the BLS model shows the trend of the amounts of improvements similar to that of the full-scale ship. On the contrary, the model-scale results fail to predict the trend of the full-scale. Particularly, the ranking of five fins of the full-scale is well reproduced by the BLS model. This indicates that the BLS model can be used as a tool to narrow down the candidates for ESDs in a preliminary design stage.
In order to examine the stern flow fields of the BLS model, velocity distributions, energy balance analysis, vortex structures and propeller inflow are compared with the full-scale. It is shown that the boundary layer and wake of the BLS model are thinner than the model-scale and close to the full-scale as expected. The energy balance analysis of the propeller plane also indicates the axial velocity field of the full-scale is well reproduced by the BLS model, though the cross-flow components of the BLS model are larger than those of the full-scale.
The vortex structures reveal that the fins affect the flow fields in a different way depending on their locations. Vortex fields of the BLS model are close to the full-scale and reflect the differences among five fin configurations similarly. This suggests that the mechanism behind the fin effects on the propulsion performance is captured by the BLS model to some extent.
In the present study, CFD analysis is conducted as a preliminary step to actual tank tests. Since the feasibility of the BLS model concept is demonstrated, the next stage is the confirmation using tank tests. In addition to the performance estimation, flow fields measurement by Stereo Particle Image Velocimetry (PIV) would be useful to explore the better design of a BLS model. It is also necessary to examine whether the present BLS model approach can be applied to other types of vessels or ESDs.
Data availability
The data that support the findings of this study are available from the corresponding author, TH, upon reasonable request.
References
IMO (2020) Procedure for calculation and verification of the Energy Efficiency Design Index (EEDI)
IMO/Press Briefings/IMO working group agrees guidelines to support new GHG measures (2021). https://www.imo.org/en/MediaCentre/PressBriefings/pages/ISWG-GHG-8.aspx. Accessed on April 27, 2022
Ikenoue, H, Hino T, Takagi Y (2020) Hydrodynamic design of energy saving device for ship scale performance improvement. In: Proc. 33rd Symposium on Naval Hydrodynamics Osaka/Japan
Schuiling B, Lafeber FH, van der Ploeg A, van Wijngaarden E (2011) The influence of the wake scale effect on the prediction of hull pressures due to cavitating propellers. In: Proc. Second International Symposium on Marine Propulsors SMP ’11, Hamburg
Guo C, Zhang Q, Shen Y (2015) A non-geometrically similar model for predicting the wake field of full-scale ships. J Marine Sci Appl 14:225–233
Kimura K, Matsuda S, Kenmoku Y, Hisamoto T (2020) Development of full-scale wake simulation method by using smart wake ship. Jpn Soc Naval Arch Ocean Eng Lect Ser 31:p415-418 ((in Japanese))
Yazaki A (1969) A diagram to estimate the wake fraction for an actual ship from a model tank test. In: Proc. 12th ITTC, Rome
Kawashima H, Kume K, Sakamoto N (2014) Study of weather adapted duct (WAD). Pap Natl Marit Res Inst 14(2):19–34 ((in Japanese))
Hino T, Hirata N, Ohashi K, Toda Y, Zhu T, Makino K, Takai M, Nishigaki M, Kimura K, Anda M, Shingo S (2016) Hull form design and flow measurements of a bulk carrier with an energy-saving device for CFD validations. In: Proceedings of PRADS2016, 4-8 September, Copenhagen
Hino T, Stern F, Larsson L, Visonneau M, Hirata N, Kim J (eds) (2021) Numerical ship hydrodynamics. In: An assessment of the Tokyo 2015 Workshop, Springer, Switzerland
Yamashita R, Toda Y, Ando J (2019) Experimental and computational analysis of effect and flow field of Fin on JBC hull. Jpn Soc Naval Arch Ocean Eng Lect Ser 29:181–186 ((in Japanese))
Ohashi K, Hino T, Kobayashi H, Onodera Y, Sakamoto N (2018) Development of a structured overset Navier–Stokes solver with a moving grid and full multigrid method. J Marine Sci Technol 24:884–901
Sakamoto N, Kobayashi H, Ohashi K, Kawanami Y, Windén B, Kamiirisa H (2020) An overset RaNS prediction and validation of full scale stern wake for 1600 TEU container ship and 63,000 DWT bulk carrier with an energy saving device. Appl Ocean Res 105:102417
Ohashi K (2021) Numerical study of roughness model effect including low-Reynolds number model and wall function method at actual ship scale. J Marine Sci Technol 26:24–36
Kobayashi H, Kodama Y (2016) Developing spline based overset grid assembling approach and application to unsteady flow around a moving body. J Math Syst Sci 6:339–347
Yamazaki R (1968) On the propulsion theory of ships on still water introduction. Mem Faculty Eng Kyushu Univ 27:187–220
ITTC Recommended Procedures and Guidelines (2014) 7.5-03-02-03: practical guidelines for ship CFD applications
ITTC Recommended Procedures and Guidelines (2014) 7.5-03-02-04: practical guidelines for ship resistance CFD
ITTC Recommended Procedures and Guidelines (2017) 7.5-03-01-01: uncertainty analysis in CFD verification and validation methodology and procedures
Xing T, Stern F (2010) Factors of safety for richardson extrapolation. ASME J Fluids Eng 132:061403–5
Zou L, Larsson L (2014) CFD verification and validation in practice—a study based on resistance submissions to the gothenburg 2010 workshop on numerical ship hydrodynamics. In: Proceedings of 30th Symposium on Naval Hydrodynamics, 2-7 November, Hobart
Andersen J, Eslamdoost A, Vikström M, Bensow RE (2018) Energy balance analysis of model-scale vessel with open and ducted propeller configuration. Ocean Eng 167:369–379
Sakamoto N, Kume K, Kawanami Y, Kamiirisa H, Mokuo K, Tamashima M (2019) Evaluation of hydrodynamic performance of pre-swirl and post-swirl ESDs for merchant ships by numerical towing tank procedure. Ocean Eng 178(15):104–133
Acknowledgements
The contributions of Mr. Tetsuro Miyaji and Mr. Daichi Watanabe, the former students of Yokohama National University, in the early stage of the study are gratefully acknowledged. This work was supported by JSPS KAKENHI Grant Number JP19K22013.
Funding
Open Access funding provided by Yokohama National University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Sadakata, K., Hino, T. & Takagi, Y. Estimation of full-scale performance of energy-saving devices using Boundary Layer Similarity model. J Mar Sci Technol (2024). https://doi.org/10.1007/s00773-023-00981-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00773-023-00981-2