
Abstract
In this paper, we investigate the generalized Ito equation. By using the truncated Painlevé analysis method, we successfully derive its nonlocal symmetry and Bäcklund transformation, respectively. By introducing new dependent variables for the nonlocal symmetry, we find the corresponding Lie point symmetry. Moreover, we construct the interaction solution between soliton and cnoidal periodic wave of the equation by considering the consistent tanh expansion method. The conservation laws of the equation are also obtained with a detailed derivation.
Similar content being viewed by others

1 Introduction
It is well known that nonlinear evolution equations (NLEEs) play some important role in mathematics, physics, chemistry, biology and other fields. It is necessary to construct their explicit solutions in order to understand the mechanisms of their physical phenomena. Some powerful methods, such as inverse scattering transformation (IST) [1], Lie symmetry method [2,3,4], the Möbious invariant form [5], etc. [6,7,8,9,10,11,12,13], have been explored for seeking exact solutions of NLEEs. It is worth mentioning that Lie symmetry method, particulary nonlocal symmetry method, is a very effective method. The research on nonlocal symmetry can be traced back to before 1997 [14, 15]. In fact, the first complete geometric theory of nonlocal symmetries is due to Vinogradov and coworkers in the 1980s. A summary of their work appears in the AMS volume [16] published in the 1990s. With respect to applications, Sergyeyev and Reyes have published papers on nonlocal symmetries in the early 2000s [17,18,19,20,21]. Recently, Lou [22, 23] proposed the consistent Riccati expansion (CRE) method, which is used to find new solutions of NLEEs via the nonlocal symmetry. Based on that, there are many works have been done to study this problem [24,25,26,27,28,29,30,31,32,33,34].
The most general form of the fifth-order Korteweg–de Vries (KdV) equation [35] is usually expressed as
where \(u=u(x,t)\) is a differentiable function with space coordinate x and time coordinate t, \(\rho =\pm 1\), and \(\alpha , \beta , \gamma \) are arbitrary non-zero real parameters. As an important mathematical model, Eq. (1.1) has a wide range of applications in quantum mechanics and nonlinear optics, and reveals motions of long waves in shallow water under gravity and in a one-dimensional nonlinear lattice [36,37,38,39,40]. If we take \(\rho =1, \beta =2\alpha , \gamma =\frac{2}{9}\alpha ^{2}\), Eq. (1.1) can be converted into the generalized Ito equation [41]
where the parameter \(\alpha \) is non-zero constant. Its soliton solution is derived by Wazwaz in [42] with \(\alpha =3\). In this paper, we will study nonlocal symmetry of the equation via the truncated Painlevé expansion, which have not yet been discussed before. Additionally, its soliton-cnoidal wave interaction can also be obtained.
This paper is organized as follows. In Sect. 2, we obtain the nonlocal symmetry and initial value problem of the generalized Ito equation (1.2) by employing the truncated Painlevé analysis method. In Sect. 3, we use CRE method to the generalized Ito equation, and derive its interaction solution between soliton and cnoidal periodic wave. In Sect. 4, based on the Ibragimov’s theorem, the conservation laws of the equation are presented. The last section is provided for a short summary and discussion.
2 Nonlocal Symmetry and Its Localization
The truncated Painlevé analysis approach, as one of the most effective and power methods, is widely applied to seek nonlinear waves of NLEEs. Based on this method, we will consider the generalized Ito equation (1.2). For Eq. (1.2), we have the following truncated Painlevé expansion of the form
where \(\phi =\phi (x,t)\) is a singular manifold, and \(u_{0}, u_{1}, u_{2}\) are functions with x and t to be known later. Substituting the above expression (2.1) into Eq. (1.2), we can get a complicated function in regard to \(u_{0}, u_{1}, u_{2}, \phi \). By vanishing all the coefficients of each powers of \(\phi \) for the obtained equation, we can obtain the following results
It is obvious that Eq. (2.4) is just Eq. (1.2) with the solution \(u_{0}\) and the residual \(u_{1}\) is the symmetry corresponding to the solution \(u_{0}\) based on the residual symmetry theorem presented in [43]. So we can get a solution of Eq. (1.2) given by
which is an auto-Bäcklund transformation between u and \(u_{0}\).
In terms of the nonlocal symmetry \(\sigma ^{u}=\frac{90\phi _{xx}}{\alpha }\), the corresponding initial value problem is written as
where \(\epsilon \) means infinitesimal parameter. Subsequently, we introduce the following new dependent variables
so that the nonlocal residual symmetry becomes the local Lie point symmetry of the closed prolonged system.
For Eq. (2.6), it is not hard to find that the nonlocal residual symmetry for (1.2) can be localized to the Lie point symmetry of form
for the prolonged system
Therefore the corresponding Lie symmetry vector is derived by
Meanwhile the initial value problem (2.6) becomes
By further calculating the initial value problem, we have the following theorem.
Theorem 1
If \({u, \phi , f, h, \rho }\) is a solution of the prolonged system (2.9), so \({\overline{u}}, \overline{\phi }, \overline{f}, \overline{h}, \overline{\rho }\) can be given by
with infinitesimal parameter \(\epsilon \).
3 Consistent Riccati Expansion Method and Interaction Solution
In this section, by employing the CRE approach provided in [44,45,46], we mainly introduce a new form of solution as follows
where \(u_{2}, u_{1}, u_{0}\) are the determined functions with x and t, and R(w) is a special solution for the following Riccati equation
with R(w) being a general solution with respect to \(\tanh (w)\), and arbitrary constants \(a_{0}, a_{1}, a_{2}\). By substituting (3.1) and (3.2) into (1.2), and making coefficients of all the same powers of R(w) to zero, one can find
with \(\delta =a_{1}^{2}-4a_{0}a_{2}\). To clarify the solution more clearly, we introduce a theorem as follows.
Theorem 2
If w is a solution of Eq. (3.4), then
is a solution of the generalized Ito equation (1.2) with a solution R(w) for the Riccati equation (3.2).
In next work, we will focus on interaction solutions which can be used to describe some interesting physical phenomena of the generalized Ito equation (1.2). By investigating Eq. (3.4), let us suppose w of the following form
where
satisfies the following two expressions
with
In order to construct Jacobi elliptic function interaction solutions, we study \(W_{1}\) in the form of
Moreover, by integrating the above Eq. (3.10), one can obtain W in the form of
Substituting (3.9) and (3.10) into (3.8), we have
where \(k_{1}, k_{2}, \mu _{0}\) are arbitrary constants.
Based on the above analysis, an interaction solution between soliton and canoidal periodic wave is expressed by
where \(W_{1}, W\) are given by (3.10) and (3.11).
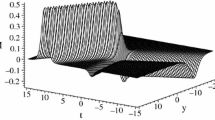
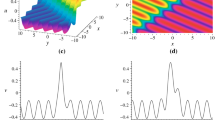
Based on different parameters, Figs. 1 and 2 reveal the propagation situation of interaction solution (3.13) between soliton wave and cnoidal periodic wave, respectively.

Interaction solution (3.13) between soliton waves and cnoidal periodic waves by choosing appropriate parameters: \(k_{1}=-\,0.5, k_{2}=0.9, d_{1}=1, d_{2}=1, \mu _{0}=1, n=0.2, \delta =4\). a Evolution of the soliton-cnoidal structure. b The Profile of the special structure at \(t=0\). \({\textbf {(c)}}\) The Profile of the special structure at \(x=0\)

Interaction solution (3.13) between soliton waves and cnoidal periodic waves by choosing appropriate parameters: \(k_{1}=-0.6, k_{2}=1.31, d_{1}=1, d_{2}=1, \mu _{0}=1, n=0.5, \delta =4\). a Evolution of the soliton-cnoidal structure. b The Profile of the special structure at \(t=0\). c The Profile of the special structure at \(x=0\)
4 Conservation Laws
In this section, we first present some concepts and formulations to construct the conservation laws of the generalized Ito equation (1.2). We consider a general form of systems
where \(x=(x_{1},x_{2},\cdots ,x_{n})\) are n independent variables, \(u=(u^{1},u^{2},\cdots ,u^{m})\) are m dependent variables and \(u_{(s)}\) is s-th order partial derivatives.
Theorem 3
The adjoint equation of Eq. (4.1) is given by
with
Here, the formal Lagrangian for Eq. (4.1) is
with \(v=v(v^{1},v^{2},\cdots ,v^{m})\) being new dependent variables about x.
Theorem 4
Each infinitesimal symmetry
for Eq. (4.1) leads to a conservation law \(D_{j}(C^{j})=0\) constructed by
with
According to the above Theorem, on the one hand, we construct the following Lagrangian form of Eq. (1.2)
where v is a new dependent variables. Substituting (4.8) into (4.2), then the adjoint equation of Eq. (1.2) yields
with
In view of (4.8), the adjoint equation (4.9) can be deduced to
If we substitute \(-u\) instead of v in (4.11), Eq. (1.2) is derived.
On the other hand, we represent a general vector formalism of (4.1)
The corresponding conservation law is constructed by
where \(C=(C^{t},C^{x})\) means the conserved vector, i.e.,
with
Theorem 5
We can obtain the following three geometric vectors for Eq. (1.2)
by employing the Lie symmetry analysis method.
Then, we can derive the following conserved vectors of Eq. (1.2) by discussing the symmetry generators \(X_{1}, X_{2}, X_{3}\).
Case 1 For the generator
the corresponding Lie characteristic function is
then we can obtain the conserved vector of Eq. (1.2)
Case 2 For the generator
the corresponding Lie characteristic function is
then we can obtain the conserved vector of Eq. (1.2)
Case 3 For the generator
the corresponding Lie characteristic function is
then we can obtain the conserved vector of Eq. (1.2)
5 Conclusions and Discussions
In this work, we have investigated the generalized Ito equation. In view of the truncated Painlevé expansion method, its auto-Bäcklund transformation and nonlocal symmetry have been derived, respectively. By prolonging the generalized Ito equation to a closed prolonged system, its nonlocal symmetry would be localized to the corresponding Lie point symmetry. Moreover, based on CRE method, we have constructed an interaction solution between soliton and canoidal periodic wave with a Jacobi sine function. The dynamic behavior characteristics of interaction solution have been revealed by Figs. 1 and 2. Additionally, three groups of conservation laws for the generalized Ito equation (1.2) have been constructed in detail. It is hoped that the results of this work can help to enrich the dynamic behavior of the equation.
Data Availability
No data was used for the research described in the article.
References
Ablowitz, M.J., Clarkson, P.A.: Solitons, Nonlinear Evolution Equations and Inverse Scattering. Cambridge University Press, Cambridge (1991)
Bluman, G.W., Bluman, S.: Symmetries and Differential Equations. Springer, New York (1989)
Olver, P.J.: Applications of Lie Groups to Differential Equations. Springer, New York (1993)
Ibragimov, N.H.: Lie Group Analysis of Differential Equations-Symmetry. Exact Solutions and Conservation Laws. CRC, Boca Raton (2006)
Lou, S.Y., Hu, X.B.: Non-local symmetries via Darboux transformations. J. Phys. A Math. Gen. 30, L95–L100 (1997)
Fan, E.G.: Extended tanh-function method and its applications to nonlinear equations. Phys. Lett. A 277, 212–218 (2000)
Wazwaz, A.M.: Gaussian solitary wave solutions for nonlinear evolution equations with logarithmic nonlinearities. Nonlinear Dyn. 83, 591–596 (2016)
Ma, W.X., Zhou, Y.: Lump solutions to nonlinear partial differential equations via Hirota bilinear forms. J. Differ. Equ. 264, 2633–2659 (2018)
Dai, C.Q., Liu, J., Fan, Y., Yu, D.G.: Two-dimensional localized Peregrine solution and breather excited in a variable-coefficient nonlinear Schrödinger equation with partial nonlocality. Nonlinear Dyn. 88, 1373–1383 (2017)
Ding, D.J., Jin, D.Q., Dai, C.Q.: Analytical solutions of differential-difference sine-Gordon equation. Therm. Sci. 21, 1701–1705 (2017)
Dai, C.Q., Wang, Y.Y., Fan, Y., Yu, D.G.: Reconstruction of stability for Gaussian spatial solitons in quintic-septimal nonlinear materials under PT-symmetric potentials. Nonlinear Dyn. 92, 1351–1358 (2018)
Wang, Y.Y., Zhang, Y.P., Dai, C.Q.: Re-study on localized structures based on variable separation solutions from the modified tanh-function method. Nonlinear Dyn. 83, 1331–1339 (2016)
Wang, D.S., Wang, X.L.: Long-time asymptotics and the bright N-soliton solutions of the Kundu–Eckhaus equation via the Riemann–Hilbert approach. Nonlinear Anal. Real World Appl. 41, 334–361 (2018)
Krasil’shchik, I.S., Vinogradov, A.M.: Nonlocal symmetries and the theory of coverings: an addendum to AM Vinogradov’s “local symmetries and conservation laws’’. Acta Appl. Math. 2, 79–96 (1984)
Krasil’shchik, I.S., Vinogradov, A.M.: Nonlocal trends in the geometry of differential equations: symmetries, conservation laws, and Bäcklund transformations symmetries of partial differential equations, part I. Acta Appl. Math. 15, 161–209 (1989)
Krasil’shchik, I.S., Vinogradov, A.M., et al.: Symmetries and Conservation Laws for Differential Equations of Mathematical Physics. American Mathematical Society, Providence (1999)
Sergyeyev, A.: Infinite hierarchies of nonlocal symmetries of the Chen–Kontsevich–Schwarz type for the oriented associativity equations. J. Phys. A Math. Theor. 42(40), 404017 (2009)
Reyes, E.G.: Geometric integrability of the Camassa–Holm equation. Lett. Math. Phys. 59, 117–131 (2002)
Heredero, R.H., Reyes, E.G.: Geometric integrability of the Camassa–Holm equation. II. Int. Math. Res. Not. 2012(13), 3089–3125 (2012)
Reyes, E.G.: Nonlocal symmetries and the Kaup–Kupershmidt equation. J. Math. Phys. 46, 073507 (2005)
Reyes, E.G.: On nonlocal symmetries of some shallow water equations. J. Phys. A Math. Theor. 40, 4467 (2007)
Lou, S.Y.: Consistent Riccati expansion for integrable systems. Stud. Appl. Math. 134, 372–402 (2015)
Lou, S.Y., Cheng, X.P., Tang, X.Y.: Dressed dark solitons of the defocusing nonlinear Schrödinger equation. Chin. Phys. Lett. 31, 070201 (2014)
Dong, M.J., Tian, S.F., Yan, X.W., Zhang, T.T.: Nonlocal symmetries, conservation laws and interaction solutions for the classical Boussinesq–Burgers equation. Nonlinear Dyn. 95, 273–291 (2019)
Yan, X.W., Tian, S.F., Dong, M.J., Wang, X.B., Zhang, T.T.: Nonlocal symmetries, conservation laws and interaction solutions of the generalised dispersive modified Benjamin–Bona–Mahony equation. Z. Naturforsch. A 73, 399–405 (2018)
Feng, L.L., Tian, S.F., Tian, T.T.: Bäcklund transformations, nonlocal symmetries and soliton–cnoidal interaction solutions of the (2+1)-dimensional Boussinesq equation. Bull. Malays. Math. Sci. Soc. 43, 141–155 (2020)
Feng, L.L., Tian, S.F., Zhang, T.T., Zhou, J.: Nonlocal symmetries, consistent Riccati expansion, and analytical solutions of the variant Boussinesq system. Z. Naturforsch. A 72, 655–663 (2017)
Ren, B., Lin, J.: Interaction behaviours between soliton and cnoidal periodic waves for the cubic generalised Kadomtsev–Petviashvili equation. Z. Naturforsch. A 70, 539–544 (2015)
Ren, B., Liu, X.Z., Liu, P.: Nonlocal symmetry reductions, CTE method and exact solutions for higher-order KdV equation. Commun. Theor. Phys. 63, 125–128 (2015)
Cheng, W.G., Li, B., Cheng, Y.: Construction of soliton–cnoidal wave interaction solution for the (2+1)-dimensional breaking soliton equation. Commun. Theor. Phys. 63, 549 (2015)
Chen, J.C., Chen, Y.: Nonlocal symmetry constraints and exact interaction solutions of the (2+1) dimensional modified generalized long dispersive wave equation. J. Nonlinear Math. Phys. 21, 454–472 (2014)
Ren, B., Lou, Z.M., Liang, Z.F., Tang, X.Y.: Nonlocal symmetry and explicit solutions for Drinfel’d–Sokolov–Wilson system. Eur. Phys. J. Plus 131, 441–449 (2016)
Ren, B.: Symmetry reduction related with nonlocal symmetry for Gardner equation. Commun. Nonlinear Sci. Numer. Simul. 42, 456–463 (2017)
Ren, B., Cheng, X.P., Lin, J.: The (2+1)-dimensional Konopelchenko–Dubrovsky equation: nonlocal symmetries and interaction solutions. Nonlinear Dyn. 86, 1855–1862 (2016)
Sierra, C.A.G., Salas, A.H.: The generalized tanh-coth method to special types of the fifth-order KdV equation. Appl. Math. Comput. 203, 873–880 (2008)
Kaup, D.J.: On the inverse scattering problem for cubic eingevalue problems of the class \(\psi _{xxx}+6Q\psi _{x}+6R\psi =\lambda \psi \). Stud. Appl. Math. 62, 189–216 (1980)
Caudrey, P.J., Dodd, R.K., Gibbon, J.D.: A new hierarchy of Korteweg–de Vries equation. Proc. R. Soc. Lond. A 351, 407–422 (1976)
Baldwin, D., Göktas, Ü., Hereman, W., Hong, L., Martino, R.S., Miller, J.C.: Symbolic computation of exact solutions expressible in hyperbolic and elliptic functions for nonlinear PDEs. J. Symb. Comput. 37, 669–705 (2004)
Lax, P.D.: Integrals of nonlinear equations of evolution and solitary waves. Commun. Pure Appl. Math. 62, 467–490 (1968)
Sawada, K., Kotera, T.: A method for finding \(N\)-soliton solutions for the KdV equation and KdV-like equation. Prog. Theor. Phys. 51, 1355–1367 (1974)
Ito, M.: An extension of nonlinear evolution equations of the K-dV (mK-dV) type to higher orders. J. Phys. Soc. Jpn. 49, 771–778 (1980)
Wazwaz, A.M.: The extended tanh method for new solitons solutions for many forms of the fifth-order KdV equations. Appl. Math. Comput. 184, 1002–1014 (2007)
Lou S.Y.: Residual symmetries and Bäcklund transformations. arXiv preprint arXiv:1308.1140 (2013)
Gao, X.N., Lou, S.Y., Tang, X.Y.: Bosonization, singularity analysis, nonlocal symmetry reductions and exact solutions of supersymmetric KdV equation. J. High Energy Phys. 2013, 1–29 (2013)
Cheng, C.L., Lou, S.Y.: CTE solvability, nonlocal symmetries and exact solutions of dispersive water wave system. Commun. Theor. Phys. 61, 545–550 (2014)
Lou, S.Y., Hu, X.R., Chen, Y.: Nonlocal symmetries related to Bäcklund transformation and their applications. J. Phys. A Math. Theor. 45, 155209 (2012)
Acknowledgements
The author expresses her gratitude to the editor and referees for their valuable comments and suggestions.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
The single author writes and completes the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
No competing financial or non-financial interests.
Ethical approval and consent to participate
The article is not under consideration in other journals.
Consent for publication
Not applicable.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wang, H. Nonlocal Symmetries, Consistent Riccati Expansion Solvability and Interaction Solutions of the Generalized Ito Equation. J Nonlinear Math Phys 31, 9 (2024). https://doi.org/10.1007/s44198-024-00173-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44198-024-00173-5