
Abstract
Integrated assessments of wetland hydrologic regimes and other environmental factors are key to understanding the ecology of species breeding in ephemerally flooded wetlands, and reproductive success is often directly linked to suitable flooding regimes, both temporally and spatially. We used high-resolution Light Detection and Ranging (LiDAR) data to develop bathymetric stage–flooded area relationships, predict spatial extent of flooding, and assess vegetation structure in 30 pine flatwoods wetlands. For a subset of wetlands with monitoring wells, we then integrated bathymetric and water level data to create multi-year time series of daily flooded areas. We then related the observed flooded areas to topographic and landscape metrics to develop models predicting flooded extents in wetlands without monitoring wells. We found that stage–area curves varied depending on wetland size and bathymetry, such that a one-cm increase in water depth could generate flooded area increases ranging from hundreds to thousands of square meters. Flooded areas frequently fragmented into discrete flooded patches as wetlands dried, and there was a weak positive correlation between hydroperiod and mean flooded area across multiple years (r = 0.32). To evaluate the utility of using LiDAR-derived data to support the conservation of wetland-breeding species, we combined metrics of flooding and vegetation to map potentially suitable habitat for the imperiled reticulated flatwoods salamander (Ambystoma bishopi). Overall, projects focusing on the ecology of wetland-breeding species could gain a broader understanding of habitat effects from coupled assessments of bathymetry, water level dynamics, and other wetland characteristics.
Similar content being viewed by others
Introduction
Globally, widespread loss and degradation of wetland ecosystems have occurred through a variety of anthropogenic mechanisms, reducing wetland area and eroding the functionality of remaining wetlands (Davidson 2014; Allen et al. 2020). This is especially true for ephemerally flooded, often geographically isolated wetlands (i.e., lacking a consistent surface water connection; Tiner 2003) that occur within many low-relief landscapes such as the southeastern Coastal Plain and Prairie Pothole regions of the United States (Lane and D’Amico 2016). Such systems provide critical habitat for a variety of wildlife species (Jenkins et al. 2001; Gibbons et al. 2006; Skagen et al. 2008) and contribute to landscape-scale hydrologic processes, nutrient cycling, and connectivity (McLaughlin et al. 2014; Uden et al. 2014; Capps et al. 2015; Cohen et al. 2016; Smith et al. 2018).
Seasonally and ephemerally flooded wetlands are highly productive systems that support diverse species assemblages during periods of temporary flooding (Wilbur 1980; Dodd and Cade 1998; Tarr et al. 2005; Gibbons et al. 2006; Martin and Kirkman 2009; Lukács et al. 2013). This includes fully aquatic (e.g., larval amphibians and aquatic invertebrates), semi-aquatic, and terrestrial species or life stages that can forage in and around shallow wetlands as well as diverse wetland plant communities (Kantrud and Stewart 1977; Kirkman et al. 2000; Russell et al. 2002; Eskew et al. 2009; Daniel et al. 2021). For aquatic species, exploiting these productive environments presents a tradeoff of limited predation pressure versus the risk of water dry-down before reaching a size or development stage suitable for metamorphosis to a terrestrial adult or a desiccation-resistant stage (Williams 1985; Semlitsch 1987; Wellborn et al. 1996; Skelly 1997). Importantly, the environmental conditions experienced by aquatic larvae are intrinsically linked to adult life after metamorphosis, and carry-over effects can impact multiple aspects of adult ecology (James & Semlitsch 2011; Yagi and Green 2018). Effectively quantifying the environmental conditions experienced by aquatic larvae in temporary environments and connecting them to the ecology of the adult population may provide a better understanding of fundamental ecological processes (Earl and Semlitsch 2013; Brooks et al. 2020).
For amphibians with long larval development times, the hydrology of ephemerally flooded breeding habitats and its interaction with other environmental characteristics, particularly vegetation structure, are key factors determining reproductive success (Semlitsch 2000). Hydroperiod (the duration of inundation) defines the ultimate bounds of the larval period and has thus been most frequently used to characterize the hydrologic conditions within a wetland during amphibian breeding seasons (e.g., Pechmann et al. 1989; Snodgrass et al. 2000) or used in manipulative experiments examining larval amphibian ecology (e.g., Wilbur 1987; Amburgey et al. 2016). Longer hydroperiods can increase overall amphibian productivity (Wilbur 1987; Semlitsch et al. 1996) and size at metamorphosis (Brooks et al. 2020). However, as a metric, hydroperiod represents a limited characterization, both temporally and spatially, of the hydrologic conditions within a wetland, especially when considered as a binary distinction between wet vs. dry (Bischof et al. 2013). Spatiotemporal variability in habitat quality within a wetland is ultimately controlled by multiple aspects of the hydrologic regime, including hydroperiod, the timing and rate of filling and drying events (Church 2008; Chandler et al. 2017), the spatial configuration of flooded areas (McLean et al. 2021), and how these factors relate to other environmental characteristics. To date, few studies have attempted to integrate a complete characterization of within wetland spatiotemporal variation in flooding regimes with amphibian conservation (but see Brice et al. 2022).
Bathymetry (basin shape and microtopography) determines the spatial configuration and depth of inundation within a wetland, ultimately controlling what areas are inundated in wetlands with a heterogeneous distribution of habitat types (Haag et al. 2005). With rising water levels, multiple small, flooded pools may combine into larger wetted areas, significantly altering the amount of flooded habitat available to aquatic species (Wu & Lane 2016, 2017). Furthermore, spatial variation in flooded area could coincide with spatial heterogeneity in vegetation characteristics or directly influence wetland vegetation, impacting the quality of habitat in the aquatic environment (Malhotra et al. 2016; McLean et al. 2021). On-the-ground measurements of wetland bathymetry and thus flooded area assessments are resource intensive, which limits their application in many wetland systems. Yet, high-resolution topographic data are increasingly available via Light Detection and Ranging (LiDAR) and can be used to create stage–area relationships that describe flooded area based on water depth (Jones et al. 2018a). For wetlands where water level data are readily available, these relationships become a useful tool to better understand the spatiotemporal variability of flooded areas and thus to inform conservation efforts in monitored systems. Another advantage of LiDAR is that it can be used to map vegetation within wetlands (Luo et al. 2014), allowing researchers to assess multiple components of wetland habitat using a single data source.
Water level monitoring is a resource-intensive effort and informing larger scale conservation efforts requires predictions of flooding dynamics across the distribution of wetlands within a landscape. High-resolution topography data provide one important element of wetland hydrology (bathymetry) but may also inform flooded depth and area predictions (Haag et al. 2005; Jones et al. 2018a). Ephemerally flooded wetland hydrology is characterized by strong responses to regional climate forcing (i.e., precipitation and evapotranspiration; Riekerk and Korhnak 2000; Brooks 2004; Park et al. 2014). However, groundwater fluxes (inflows or outflows) can also be dominant and variable across systems (Winter and LaBaugh 2003) via landscape and topographic characteristics (Winter 1988; Cianciolo et al. 2021). As such, relationships between observed water level regimes and landscape and topographic metrics may offer an additional use of available LiDAR data to predict inundation characteristics in other similarly situated wetlands, informing landscape-scale assessments.
We used high-resolution LiDAR data to measure wetland bathymetry, vegetation structure, and surrounding landscape characteristics of ephemerally flooded wetlands embedded within pine flatwoods of the southeastern United States Coastal Plain. We demonstrate the utility of these techniques for broadly understanding spatiotemporal variability in water levels within ephemerally flooded wetlands and for specific conservation applications, using habitat delineations for the imperiled reticulated flatwoods salamander (Ambystoma bishopi), a pine flatwoods endemic, as a case study. Pine flatwoods are low-relief ecosystems that are well-suited for this type of study because of numerous shallow, ephemerally flooded wetlands embedded within surrounding upland forests.
Methods
Study System
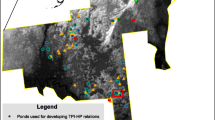
We studied 30 wetlands embedded within the East Bay Flatwoods, one of the best remaining examples of the pine flatwoods ecosystem, located on Eglin Air Force Base in Okaloosa and Santa Rosa counties, Florida. The study area is characterized by poorly drained, sandy soils with high water tables, creating numerous ephemerally flooded wetlands across the landscape. The East Bay Flatwoods receives approximately 165 cm of precipitation each year, on average, with approximately 50% of precipitation falling from November–May (Haas, unpublished data). Study wetlands ranged in size from 833 to 96,595 m2 (median size = 16,958 m2; Table 1). Wetlands in this ecosystem are most likely to be inundated from the late fall through early spring when evapotranspiration rates are low and then typically dry during the summer months, despite an increase in precipitation (Chandler et al. 2016). Wetlands typically contain a pine overstory of longleaf (Pinus palustris) and slash pine (P. elliottii) and an understory of thick herbaceous vegetation (commonly dominated by Pineland Threeawn, also known as wiregrass, Aristida stricta; Chandler, 2015), but some wetlands have developed a woody midstory in the absence of regular wildfires. Legacy effects of fire exclusion combined with current logistical challenges of prescribed fire application and ongoing mechanical and herbicide treatments have created a variety of wetland vegetation characteristics within the study area (Varner et al. 2005; Gorman et al. 2013; Figure S1).
Pine flatwoods wetlands provide critical breeding habitat for imperiled flatwoods salamanders (Figure S2; O’Donnell et al. 2017). Adult salamanders migrate to breeding wetlands seasonally where they deposit eggs in dry wetland basins (Anderson and Williamson 1976). The presence of herbaceous vegetation in and around breeding wetlands plays a critical role at multiple stages of the flatwoods salamander life cycle, including as egg deposition sites (Gorman et al. 2014), habitat for larval salamanders and their prey (Sekerak et al. 1996; Gorman et al. 2009; Chandler et al. 2015), and potentially as foraging sites or refugia for juvenile and adult salamanders (Jones et al. 2012). In addition to needing suitable vegetation, successful recruitment depends on suitable hydrology that inundates terrestrial eggs, supports an 11–18-week larval period, and has a recession rate conducive to metamorphosis (Palis 1995; Chandler et al. 2017). Thus, high-quality breeding habitat for flatwoods salamanders depends on the intersection of appropriate vegetation and flooding regimes that allows salamanders to complete their development period.
LiDAR Estimation of Bathymetry and Flooding Extent
We used LiDAR data provided by Jackson Guard (Eglin’s Natural Resources Division) for the approximately 810-ha flatwoods area that included the 30 study wetlands. The data were collected on 17 April 2018 (hereafter, the “LiDAR date”) with a Leica ALS80 airborne LiDAR sensor and were determined to have a root mean square error of 0.049 m (vertical accuracy) using ground control points. Data provided were pre-processed into a Digital Elevation Model (DEM, representing the ground surface) and Digital Surface Model (DSM, representing the tallest surface of vegetation or open water), both of which had a pixel resolution of 0.501 × 0.501 m. Prior to analyses, we filled all single cell pits in the raster layers using the Whitebox Package (Wu 2020) and smoothed the DEM and DSM by calculating mean cell values within a 3 × 3 moving window (Jones et al. 2018a). We defined wetland basin areas using field-delineated boundaries that were indicated by a combination of high-water levels and wetland (hydrophytic) vegetation.
We used the processed DEM to calculate stage–area relationships based on wetland bathymetries using the general methodologies of Jones et al. (20152018a; Fig. 1A,B). Beginning at the minimum elevation in each wetland, we incrementally filled each wetland basin by 0.01 m. For each 0.01 m increase in water level, we calculated the flooded area (in m2) based on the number of pixels that would be inundated at that water level. These calculations created stage–area curves for each wetland beginning at the lowest elevation and increasing to a water depth that completely flooded the delineated basin (e.g., Fig. 1B).

Example of estimating hydrologic regime in a pine flatwoods wetland (Pond 2). A Wetland bathymetry calculated using LiDAR data. B Stage-area curve derived from bathymetry using measured (dry-pixel elevations) and estimated (flooded pixels) data points on the LiDAR date. The vertical dashed line represents the maximum water level recorded in a monitoring well. C Daily flooded area for well data over a 4-yr period, as estimated from the stage-area curve. Shaded areas represent the flatwoods salamander breeding season
Empirical Estimation of Flooding
Fourteen of the 30 study wetlands had water level monitoring wells installed at the time of the LiDAR date. To construct wells, we used 3.8 cm diameter, screened PVC pipe and placed wells 1 m below ground surface. We installed monitoring wells at the approximate deepest point of the wetland (installation dates ranged from 17 August 2012 to 17 November 2017) and outfitted each well with a HOBO® U20 pressure transducer (Onset Computer Corporation, Bourne, MA). We converted 15-minute pressure measurements to water levels (relative to ground surface), correcting for barometric pressure variation using a U20 logger placed in the well head space. We calculated daily water levels as the mean water level from 11:00 pm to 1:00 am and used these values for all analyses.
We used these hydrologic data to refine the stage–area curves for the 14 wetlands, based on whether or not wetlands were partially inundated on the LiDAR date. Topographic LiDAR sensors do not penetrate water and cannot be used to measure wetland bathymetry in flooded areas (Quadros et al. 2008). We determined that 12 of the 14 wetlands were partially flooded on the LiDAR date. For the two dry wetlands, we made no changes to the bathymetric stage–area curves. For the 12 partially-flooded wetlands, we accounted for uncertainty in bathymetries by defining all elevations within 0.1 m of the minimum within-wetland DEM elevation (twice the vertical accuracy of the LiDAR data to capture error in both directions) as the probable flooded area at the time of data collection. We then shifted the stage–area curves so that 0.1 m above the lowest elevation (i.e., the extent of the hypothesized flooded area) now represented the water depth recorded on the LiDAR date. All values above this elevation were interpreted as correctly defined by sequentially inundating the dry areas of the wetland basin using the DEM. To estimate the underwater portion of the stage–area curve, we modified previously published equations that relate wetland stage to flooded area (Hayashi & van der Kamp 2000; Minke et al. 2010). This relationship is a power function given by the equation:
where A is the predicted flooded area, s is the flooded area on the LiDAR date, z is the wetland stage (i.e., water depth), h0 is the wetland stage on the LiDAR date, and p is a constant that defines the shape of the stage–area curve. We estimated p for each wetland using nonlinear least squares estimation and a dataset that included the origin and the first four stage–area values calculated from the LiDAR data, because these values maintained a relatively constant slope that was most closely related to the portion of the stage–area curve being estimated. Thus, the final stage–area curve for the 12 partially-flooded wetlands had an estimated underwater (“flooded”) portion derived from Eq. 1 and an above water portion estimated from the bathymetry of dry areas within the wetland basin (Fig. 1B).
In the 16 wetlands with no monitoring well, we assumed that all wetlands were partially flooded on the LiDAR date. We again defined all elevation values within 0.1 m of the minimum DEM elevation as the probable flooded area. For these wetlands, we removed portions of the stage–area curves below 0.1 m because no further correction could be made.
Modeling Spatial and Temporal Dynamics
To model potential flooding dynamics, we used the bathymetry data for all wetlands (n = 30) to examine the spatial distribution of flooded patches as wetlands filled. We calculated the number of discrete (i.e., not connected) flooded patches in each wetland in 0.05 m increments for elevations ranging from 0.1 to 0.5 m above the lowest elevation (i.e., excluding portions of wetlands predicted to be flooded). We also calculated the area of the largest patch relative to the total flooded area of all patches. For these calculations, we only considered flooded patches that were at least 1 m2.
To specifically model flooding dynamics during the flatwoods salamander breeding season, we used the derived stage–area curves and the well data for the 14 monitored wetlands to estimate daily flooded areas for each day with a water level measurement (Fig. 1C). We examined the correlation between percent mean flooded area (per season) and hydroperiod across four flatwoods salamander breeding seasons (November–May, 2015–2019) that had the most complete well data for the 14 wetlands. These four breeding seasons also had characteristics (i.e., suitable hydrology) that were favorable for successful flatwoods salamander reproduction in at least some wetlands (Haas, unpublished data). We calculated hydroperiod as the longest period in days of continual surface water that at least partially overlapped the breeding season. Mean flooded area across breeding seasons was calculated by including only days with at least some water in the wetland and was standardized to percent flooded area for each basin.
To examine the spatial extent of flooding in these 14 wetlands, we calculated the percentage of days that each pixel would have been inundated when there was some water in the wetland during the 2015–2019 breeding seasons. For this analysis, we had no way to spatially differentiate water depths within areas predicted to be flooded during the LiDAR data collection. Therefore, we assessed flooding variation based only on water depths greater than those recorded on the LiDAR date. We assigned all pixels predicted to be flooded during LiDAR collection a 100% chance of being flooded at these water depths. For the two dry wetlands, we only considered water depths greater than 5 cm. Thus, this metric of flooding is relative to wetlands being partially flooded.
Landscape and Topographic Metrics
To examine the effect of landscape and topographic factors on flooded area in wetlands, we used the DEM to calculate 10 landscape metrics following Cianciolo et al. (2021) (Table S1). These described various aspects of terrain and landscape position and were calculated using tools in the Whitebox package (Wu 2020). For all metrics, we smoothed the resulting raster layer by calculating the mean value in a 5 × 5 moving window surrounding each pixel. Mean values were then calculated for each delineated wetland basin. We also included the metrics of total wetland area, mean within-wetland elevation, and mean elevation difference between within-wetland pixels and adjacent upland pixels occurring within a 50-m buffer. This resulted in 13 metrics for wetland size, topography, and landscape position (Table S1).
Prior to analyses, we centered and scaled all metrics by subtracting the mean and dividing by the standard deviation. We dropped five metrics from the analysis (see Table S1) because they were correlated with other metrics (|r| ≥ 0.65; Table S2). We fit linear regression models using the remaining eight metrics to predict the median flooded area across four flatwoods salamander breeding seasons (2015–2019) in the 14 wetlands with well data. We also calculated a single median flooded area for each wetland during the breeding season (November–May) using all periods with at least some water in the wetland. We standardized flooded area metrics to percent flooded area to account for the large difference in wetland size. We fit all subsets regression using the Leaps package in R (Lumley & Miller 2020) and restricted the analysis to include a maximum of two landscape metrics per model to reduce the possibility of overfitting the model. We did not include any interaction effects in these models. We selected the best model using a combination of the Bayesian Information Criteria (BIC) and adjusted R2 and used that model to estimate the median flooded area in the 16 wetlands without monitoring well data.
Vegetation Metrics
To estimate vegetation height, we subtracted the DEM from the DSM layer. We then delineated the vegetated areas in each wetland that appeared suitable for flatwoods salamander eggs and larvae. Suitable areas were defined as all pixels with a vegetation height of less than 1.0 m; such areas are indicative of herbaceous vegetation and not shrubs or trees. We made no correction to the vegetation metric for predicted flooded areas in wetlands because depths measured on the LiDAR date were generally not deep enough to misrepresent shrubs as part of the herbaceous layer, and we had no way to spatially delineate water depths within the predicted flooded area.
Potential Flatwoods Salamander Habitat
We combined the results from hydrologic metrics, landscape topography, and vegetation metrics to predict the location of potentially suitable flatwoods salamander habitat. For sites with well data, we used known stage–area curves and water level data to map frequently flooded areas as described above. For sites without well data, we used the best-performing landscape model to estimate median flooded area. Starting at the lowest elevation, we identified all pixels that would be flooded at the median flooded area, assuming wetlands flooded sequentially from low to high elevations. We were unable to predict spatial flooding patterns in one wetland that had an estimated median flooded area less than the area that we estimated was flooded on the LiDAR date.
We identified all wetland pixels that were characterized by either: (1) high-quality hydrologic conditions (flooded during 50% of water level measurements or pixels representing the predicted median flooded area from the best-performing landscape model), (2) high-quality vegetation conditions (vegetation heights < 1.0 m), or (3) both conditions. To evaluate the accuracy of these predictions, we identified the percent of overlap with on-the-ground delineations of mixed herbaceous habitats believed to be suitable for flatwoods salamanders. Briefly, in 11 wetlands, we mapped mixed herbaceous habitats in 2016 using expert site knowledge and a combination of handheld GPS units and Google Earth (Google, Mountain View, CA, USA). We defined these habitats as areas larger than 1 m2 that were dominated by herbaceous vegetation known to provide egg-laying habitat for flatwoods salamanders (Gorman et al. 2014). All other analyses were performed in R version 4.1.1 (R Core Team 2021).
Results
Hydrologic Patterns
Across the study area, elevation ranged from 0.96 to 14.15 m above sea level (asl; mean = 7.55 m asl), and elevations within wetland basins ranged from 6.7 to 11.1 m asl (mean = 8.9 m asl). Wetlands were characterized by shallow basins, with little elevation gain from the lowest to highest points (mean elevation gradient: 1.1 m; range: 0.33–2.7 m). Higher elevations within wetland basins typically represented hummocks or raised areas along wetland edges that were unlikely to be inundated during normal conditions. In the 12 wetlands that were partially flooded on the LiDAR date, water depths ranged from 7.6 to 32.4 cm, translating to flooded areas of 6.5–42% of the mapped wetland basins (Table 1). In wetlands with no well data, the predicted flooded area on the LiDAR date ranged from 0.1 to 40% of the total wetland area (Table 1).
Stage–area curves were similar across all wetlands (Fig. 2), but the magnitude of changes in flooded area with increases in water depth depended on the size and shape of the wetland. With wetland areas ranging from 833 to 96,595 m2 (Table 1), the stage–area relationships predicted that a 1-cm increase in depth could generate flooded area increases ranging from hundreds to thousands of m2. As water levels increased within wetlands, many disjointed flooded patches formed before coalescing into larger wetted areas (Fig. 3A). A single large, flooded area tended to dominate the basin when wetlands reached approximately 50% of their maximum depth (Fig. 3B). Furthermore, the stage–area curves indicated that some wetlands experienced water levels exceeding the inflection point on the curve (i.e., when the entire wetland area is flooded; see Fig. 1B), which suggests conditions of overflow into the surrounding flatwoods.

Stage-area curves for 30 pine-flatwoods wetlands. A Curves calculated for 14 wetlands with well data, where portions of the curve predicted to be underwater on the LiDAR date (value type ‘flooded’) are estimated using data for above-water pixels (value type ‘dry’) and known water depth on the LiDAR date. B Curves estimated for 16 wetlands without well data, represented by increasing water-level increment above the lowest elevation on the LiDAR data. Elevations below 0.1 are omitted owing to the likely presence of water

Spatial changes in flooding extent within 30 pine flatwoods wetlands as water levels increase. A Box plots for change in the median number of discrete flooded patches with an area greater than one m2. Points represent individual wetlands; twelve points with > 150 patches (max = 833) are not shown. B Changes in the proportion of total flooded area that is represented by the largest patch in each wetland, coded by wetland size (< 2 ha = blue, > 2 ha = orange)
From 2015 to 2019, the number of daily flooded area values that were estimated using Eq. 1 (see Table S3 for model results) was highly variable across wetlands, ranging from 20.8 to 89.2% of all values (Table S4). On average, estimated flooded areas accounted for only approximately 1.7–12.8% of the maximum flooded area within a wetland (Table S4), highlighting that these values represented the bottom of the stage–area curves (Fig. 2A). Flooded areas across all 14 instrumented wetlands tended to be highest during the flatwoods salamander breeding season (November–May; Fig. 4A) but were highly variable across years and wetlands (Fig. 4B). In addition to this temporal variability, there was also considerable variation in the proportion of each wetland that was typically flooded. When water was present in the wetland, some wetlands had flooded areas that were most commonly near their maximum flooded area for that breeding season, while others were typically only partially flooded (e.g., Site 36 in 2015–2016 vs. Site 15 in 2016–2017; Fig. 4B). However, smaller wetlands (< 2 ha) tended to have a higher proportion of their basin flooded than larger wetlands (> 2 ha) (Table 1; Fig. 4B). Over four flatwoods salamander breeding seasons, hydroperiod was positively, but weakly, correlated to the mean percent flooded area (Pearson’s r = 0.32). A hydroperiod increase of 9 days would, on average, coincide with an approximately 10% increase in flooded area.

Density plots of the distribution of flooded areas in 14 pine flatwoods wetlands from 2015–2019. A Flooded areas by month, pooled across wetlands, where the shaded area indicates the flatwoods salamander breeding season. B Flooded areas for individual wetlands (labeled by ID number, see Table 1) during the flatwoods salamander breeding season over four annual periods. Wetlands are ordered by increasing size from top to bottom. Precipitation totals for each salamander breeding season were 138 cm, 97 cm, 72 cm, and 100 cm, respectively
Influence of Landscape and Topographic Factors
Of the eight landscape and topographic metrics that we evaluated, total wetland area was the best single predictor of the median percent flooded area during the flatwoods salamander breeding season (N = 14, adjusted R2 = 0.25, F1,12 = 5.29, P = 0.04). Smaller wetlands tended to have a higher percentage of their basins flooded than larger wetlands (Tables 1 and 2). The best multiple linear regression model included both wetland area and the mean within-wetland elevation (adjusted R2 = 0.49, F2,11 = 7.2, P = 0.01). Wetlands with basins at higher elevations tended to be more flooded than lower wetlands (Table 2).
Vegetation Structure
Across the study area, vegetation pixel heights in wetlands ranged from near 0 to over 20 m. Wetlands differed substantially in vegetation structure, with some wetlands being dominated by herbaceous vegetation, and others having large amounts of shrubs and trees (Figure S3A). Wetlands with vegetation characteristic of a fire-maintained system contained mostly herbaceous vegetation interspersed with canopy trees and small patches of woody shrubs (Figure S3B). Herbaceous vegetation was also frequently mapped near wetland edges.
Potential Flatwoods Salamander Habitat
We used the LiDAR-derived hydrologic and vegetation metrics to delineate areas with potentially suitable flatwoods salamander habitat in 29 wetlands (median flooded area observed for 14 wetlands and predicted for 15 wetlands) (Table 1). Across all sites, some wetlands tended to be hydrologically limited whereas other wetlands were limited by suitable vegetation (Figures S4A and 5). Larger wetlands tended to have a higher proportion of unsuitable habitat and lower proportion of high-quality habitat (Figure S4A). We tested the accuracy of habitat predictions by comparing the results to 19 field-delineated habitat patches in 11 wetlands. There was broad but variable overlap between remotely sensed habitat predictions and field-delineated habitat patches in most wetlands (Figures S4B and 5). Five of 19 (26.3%) field-delineated patches were characterized by at least 50% of pixels having both high quality vegetation and hydrologic characteristics, while 15 of 19 (78.9%) patches had greater than 50% of their area covered by high-quality vegetation, or high-quality hydrologic conditions, or both (Figure S4B). Areas outside of the field-delineated patches often contained potentially suitable habitat according to the LiDAR-derived predictions (Fig. 5).

Three examples of predicted habitat suitability for flatwoods salamanders, by habitat type (high-quality hydrology, high-quality vegetation, or both), as derived from LiDAR and monitoring well data. Black lines represent patch areas that were field-delineated as having high-quality vegetation
Discussion
Our study used water level observations and wetland bathymetry to characterize the spatiotemporal variation in flooding regimes within ephemerally flooded wetland systems. The effects of variation in flooding regimes within natural systems have been considered for some taxa (e.g., beavers; Hood and Larson 2015), and wildlife managers have long manipulated water depth and extent of flooded area to achieve certain goals for seeding and survival of wetland plants and to attract migratory shorebirds or wintering waterfowl (Rundle & Frederickson 1981; Colwell & Taft 2000; Collazo et al. 2002). However, these principles have rarely been applied in relation to either amphibian ecology or conservation. Instead, the amphibian literature has predominantly focused on hydroperiod when considering the effects of wetland hydrology (Pechmann et al. 1989; Snodgrass et al. 2000; Walls et al. 2013). This is likely driven by several factors, including the ease of measuring hydroperiod relative to other hydrologic metrics, the ability to manipulate hydroperiod in experimental systems, the ultimate constraints imposed on reproduction by hydroperiod, and the detailed spatial data needed to relate many metrics of amphibian breeding success to wetland bathymetry. We found a weak positive correlation between flooded area and hydroperiod across four flatwoods salamander breeding seasons, suggesting that flooded area is a complementary metric that describes portions of the hydrologic regime not captured by hydroperiod alone (e.g., water volume). Thus, despite the advantages of hydroperiod as a metric (it has been useful in many studies including our own work; Pechmann et al. 1989; Semlitsch 2000; Snodgrass et al. 2000; Gibbons et al. 2006; Chandler et al. 2016), we argue that amphibian conservation and our understanding of amphibian ecology would benefit from including a broader interpretation of the spatiotemporal variability in wetland hydrologic characteristics and their overlap with other environmental parameters.
We mapped wetland bathymetries using high-resolution LiDAR data, reducing the investment needed to measure bathymetry when compared to field surveys (Wilcox and Huertos 2005). Bathymetry data allowed us to generate stage–area relationships for a suite of wetlands, and we were then able to leverage existing monitoring well data from a subset of wetlands to measure temporal trends in flooding dynamics, expanding the hydrologic metrics that we could generate with the bathymetry data. Our results indicated that wetlands in our study area varied in flooding dynamics but that, when considering wetted area as a proportion of wetland size, smaller wetlands tended to flood more reliably than larger wetland basins. Such differences in wetlands of varying size could be used to guide management decisions on landscapes with large numbers of wetlands. Across all wetlands, most were characterized by relatively large increases in flooded area as a response to small increases in water depths. This is perhaps not surprising given the minimal topography within wetland basins, but it highlights how fluxes of even small amounts of water may have substantial effects on flooded extents and thus aquatic organisms in these wetlands. For example, vegetation management that either increases (i.e., fire suppression) or decreases (e.g., prescribed fire) evapotranspiration rates may have disproportionate effects on flooding extents (Jones et al. 2018b). Upland management through prescribed fire or vegetation management may also impact a variety of other hydrologic processes (e.g., infiltration and runoff rates; Renton et al. 2015). It may also be feasible to artificially increase both hydroperiod and flooded area in years when conditions are borderline for amphibian reproduction by pumping water into wetlands (Seigel et al. 2006; Hamer et al. 2016; Mathwin et al. 2020), but this type of active management can be logistically difficult to plan without an understanding of how much water is needed to improve breeding habitat.
At low water levels, the flooded area within most wetlands consisted of a collection of discontinuous patches, which may affect amphibian larval dispersal, growth, and survival. Fragmenting of a single flooded area into multiple patches could elevate larval densities, increasing competition (i.e., for food or space) and potentially causing larvae to metamorphose at smaller body sizes (Wilbur 1997; Leips et al. 2000). Furthermore, experimental studies have suggested that habitat patch size can impact survival and growth rate of tadpoles but that these effects are not consistent across species (Pearman 1993, 1995). Habitat patches may also vary in the amount of resources available, especially for habitat specialists like flatwoods salamanders that could be forced into patches of less favorable conditions as wetlands dry (i.e., deeper areas with dense shrub cover and less herbaceous vegetation; Chandler et al. 2017). The size of flooded patches can also impact predation pressure as invertebrate predators tend to colonize larger patches (Pearman 1995), but other predators may reach higher densities in drying wetlands (Herteux et al. 2020). In years where wetland water levels fluctuate from full pool to approximately 40% inundated, the effects of variable patch sizes could occur repeatedly over a single breeding season.
The considerable variation in flooding regimes among instrumented wetlands highlights the need for such information across the full suite of wetlands in a particular landscape. To that end, we developed a model to predict flooded areas using landscape and topographic metrics. We found that larger wetlands had a lower percentage of their basins flooded at the median flooded area. These wetlands take much higher volumes of water to fill and may also experience disproportionate effects of increased evapotranspiration because of fire suppression (Jones et al. 2018b). The two-factor model that we used to make predictions also contained a positive effect of mean wetland elevation on median percent flooded area. This effect is more challenging to interpret but may be attributable to differences in basin shape (i.e., cylindrical vs. conical wetlands), depth of the water table, wetland type (depressions vs. flats), or the presence of inundated pixels in the elevation calculation (i.e., higher than the true elevation). Furthermore, if LiDAR data had been collected when wetlands were dry, allowing for a complete description of the stage–area curve in all wetlands, then parameters describing a wetland’s shape could be incorporated into this type of analysis. Despite these limitations, our application used the best predictive model to make predictions about potentially suitable salamander habitat over a relatively small geographic extent. We caution against using the same model in other systems or locations without prior evaluation but note that, in general, landscape and topographic metrics have been useful for predicting wetland occurrence and explaining variation in flooding dynamics in other regions (Riley et al. 2017; Cianciolo et al. 2021).
In addition to hydrologic metrics, we also used the LiDAR data to estimate vegetation heights for the entire study area. Because long-term fire suppression in pine flatwoods wetlands causes a distinct change in the vegetation structure (Martin and Kirkman 2009), this simple metric provided a way to quantify vegetation characteristics within wetland basins that directly relate to habitat suitability for flatwoods salamanders. Similar methodologies have been used to quantify vegetation characteristics in other wetland systems (Luo et al. 2014), and LiDAR data has been broadly used in various assessments of habitat quality and classification (e.g., Graf et al. 2009; Martinuzzi et al. 2009). Additional collections of LiDAR data could be used to compare changes in vegetation characteristics (or even wetland bathymetries as fire removes duff layers in overgrown wetlands) over time, providing an efficient way to quantify the temporal effects of continued habitat management.
We used assessments of hydrologic characteristics and vegetation structure to broadly delineate potentially suitable flatwoods salamander habitat across our study area. These predictions generally agreed with habitat delineations that were made using expert site knowledge, with some key exceptions. First, mapped habitat was often predicted to occur outside of the areas that we delineated based on existing site knowledge. This was likely caused by a combination of continued habitat improvements from 2016 (field delineations) to 2018 (LiDAR data collection), inability to separate bare ground from short herbaceous vegetation, and the fact that field delineations of habitat are often constrained by our ability to see and access these habitats in fire-suppressed wetlands with dense shrubby overgrowth. Second, there were multiple patches (both field- and LiDAR-delineated) of high-quality vegetation that have been inundated relatively infrequently over the last several years. These areas tended to be closer to wetland edges (Fig. 5), which have likely received better fire effects than deeper areas closer to wetland centers (Bishop & Haas 2005). Overall, it can be challenging to assess habitat quality for flatwoods salamanders across a wetland basin via on-the-ground observations, highlighting the need for information describing wetland bathymetry, associated flooding extents, and their relationship with suitable vegetation structure.
While the wetlands in our study area are well-surveyed for flatwoods salamander habitat, broad delineations of potentially suitable habitat across a large number of wetlands could be used to guide management and conservation actions in other parts of the range. In many large wetlands, it can be difficult to identify the best habitat patches without extensive surveys. Identifying potential portions of wetlands to survey before surveyors visit wetlands could increase survey efficiency (Guisan et al. 2006), especially when detection probability is low (Brooks and Haas 2021). These habitat assessments could also be used to identify areas of wetlands where active management (i.e., removal of woody vegetation) would be most effective by expanding existing areas of suitable habitat or focusing efforts on areas of a wetland most likely to be hydrologically suitable. Finally, understanding spatial variability both within and among wetlands could be used to guide ongoing translocation efforts.
Our study was partially limited by the quality of the data that were available. First, and most significantly, 12 of 14 wetland basins with known water levels were partially flooded on the day that the LiDAR data were collected, adding considerable uncertainty to portions of our analyses. Thus, collecting LiDAR data when wetlands are dry is critical for reducing uncertainty and increasing applicability of this approach. Second, many of the landscape and topographic metrics used in our analysis were also affected by this uncertainty, making model results less transferable to other pine flatwoods systems and more difficult to interpret. Third, the data that were available did not cover the entire East Bay flatwoods and completely omitted other flatwoods areas with important flatwoods salamander habitat. Together, these issues highlight the need for effective collaboration between agencies and researchers working in the same landscapes, especially on properties where multiple agencies are working semi-independently (e.g., military bases; Schuett et al. 2001). Fourth, we were unable to assess direct links between flatwoods salamander populations and the habitat metrics delineated in this study. There is currently a lack of spatial data describing salamander populations at a within wetland scale, which is further complicated by the overall rarity of the species (i.e., many wetlands in the study are currently unoccupied).
The methodology and conceptual framework presented here provide ample opportunities for additional research, both for flatwoods salamanders and for other species. There are few studies that examine the effects of within-wetland spatiotemporal variability in flooding on amphibian ecology, fitness, or reproductive success. Larval positioning within a wetland may ultimately impact access to resources, competition, and exposure to predators, especially as wetted areas fragment into multiple patches. Linking either larval growth rates, survival, or size at metamorphosis to conditions experienced by larvae in different portions of a wetland based on flooding regime and access to different habitat types is an important next step. For flatwoods salamanders (and other species laying eggs in dry wetlands), egg positioning may also play an important role in determining reproductive success because hatching depends on both the water level when eggs are laid and subsequent increases in water level that will inundate eggs. These types of small-scale differences in habitat quality could have important effects on the success of ongoing translocation efforts. Finally, many ephemerally flooded wetlands that provide critical habitat for multiple species are currently being impacted by climate change (Greenberg et al. 2015; Chandler et al. 2016; Davis et al. 2019; Cartwright et al. 2021), potentially reshaping what characterizes a typical period of inundation. Creative applications of remote sensing and field-collected data can allow researchers to better understand hydrologic changes over long time periods or large landscapes (Brice et al. 2022). Ultimately, integrating species ecology with factors controlling hydrologic regimes within wetlands will be fundamental to making informed conservation and management decisions in the face of a changing climate.
Data Availability
Data have not been published because of the sensitive nature of flatwoods salamander breeding sites but are available from the authors upon reasonable request.
References
Allen C, Gonzales R, Parrott L (2020) Modelling the contribution of ephemeral wetlands to landscape connectivity. Ecol Model 419:1089442
Amburgey SM, Murphy M, Funk WC (2016) Phenotypic plasticity in developmental rate is insufficient to offset high tadpole mortality in rapidly drying ponds. Ecosphere 7:e01386
Anderson JD, Williamson GK (1976) Terrestrial mode of reproduction in Ambystoma cingulatum. Herpetologica 32:214–221
Bischof MM, Hanson MA, Fulton MR, Kolka RK, Sebestyen SD, Butler MG (2013) Invertebrate community patterns in seasonal ponds in Minnesota, USA: response to hydrologic and environmental variability. Wetlands 33:245–256
Bishop DC, Haas CA. (2005) Burning trends and potential negative effects of suppressing wetland fires on flatwoods salamanders. Nat Areas J 25:290–294
Brice EM, Halabisky M, Ray AM (2022) Making the leap from ponds to landscapes: integrating field-based monitoring of amphibians and wetlands with satellite observations. Ecol Indic 135:108559
Brooks RT (2004) Weather-related effects on woodland vernal pool hydrology and hydroperiod. Wetlands 24:104–114
Brooks GC, Haas CA (2021) Using historical dip net data to infer absence of flatwoods salamanders in stochastic environments. PeerJ 9:e12388
Brooks GC, Gorman TA, Jiao Y, Haas CA (2020) Reconciling larval and adult sampling methods to model growth across life-stages. PLoS ONE 15:e0237737
Capps KA, Berven KA, Tiegs SD (2015) Modelling nutrient transport and transformation by pool-breeding amphibians in forested landscapes using a 21-year dataset. Freshw Biol 60:500–511
Cartwright J, Morelli TL, Grant EHC (2021) Identifying climate-resistant vernal pools: hydrologic refugia for amphibian reproduction under droughts and climate change. Ecohydrology 15:e2354
Chandler HC The effects of climate change and long-term fire suppression on ephemeral pond communities in the southeastern United States. Thesis, Virginia Tech. Blacksburg, Virginia, Chandler USA, Haas HC, Gorman CA (2015) TA (2015) The effects of habitat structure on winter aquatic invertebrate and amphibian communities in pine flatwoods wetlands. Wetlands 35:1201–1211
Chandler HC, Rypel AL, Jiao Y, Haas CA, Gorman TA (2016) Hindcasting historical breeding conditions for an endangered salamander in ephemeral wetlands of the southeastern USA: implications of climate change. PLoS ONE 11:e0150169
Chandler HC, McLaughlin DL, Gorman TA, McGuire KJ, Feaga JB, Haas CA (2017) Drying rates of ephemeral wetlands: implications for breeding amphibians. Wetlands 37:545–557
Church DR (2008) Role of current versus historical hydrology in amphibian species turnover within local pond communities. Copeia 2008:115–125
Cianciolo TR, Diamond JS, McLaughlin DL, Slesak RA, D’Amato AW, Palik BJ (2021) Hydrologic variability in black ash wetlands: implications for vulnerability to emerald ash borer. Hydrol Process 35:e14014
Cohen MJ, Creed IF, Alexander L et al (2016) Do geographically isolated wetlands influence landscape functions? PNAS 113:1978–1986
Collazo JA, O’Harra DA, Kelly CA (2002) Accessible habitat for shorebirds: factors influencing its availability and conservation implications. Waterbirds 25:13–24
Colwell MA, Taft OW (2000) Waterbird communities in managed wetlands of varying water depth. Waterbirds 23:45–55
Daniel J, Polan H, Rooney RC (2021) Determinants of wetland-bird community composition in agricultural marshes of the Northern Prairie and Parkland Region. Wetlands 41:14
Davidson NC (2014) How much wetland has the world lost? Long-term and recent trends in global wetland area. Mar Freshw Res 65:934–941
Davis CL, Miller DAW, Grant EHC, Halstead BJ, Kleeman PM, Walls SC, Barichivich WJ (2019) Linking variability in climate to wetland habitat suitability: is it possible to forecast regional responses from simple climate measures? Wetl Ecol Manag 27:39–53
Dodd CK, Cade BS (1998) Movement patterns and the conservation of amphibians breeding in small, temporary wetlands. Conserv Bio 12:331–339
Earl JE, Semlitsch RD (2013) Carryover effects in amphibians: are characteristics of the larval habitat needed to predict juvenile survival? Ecol Appl 23:1429–1442
Eskew EA, Willson JD, Winne CT (2009) Ambush-site selection and ontogenetic shifts in foraging strategy in a semi-aquatic pit viper, the Eastern Cottonmouth. J Zool 277:179–186
Gibbons JW, Winne CT, Scott DE et al (2006) Remarkable amphibian biomass and abundance in an isolated wetland: implications for wetland conservation. Conserv Bio 20:1457–1465
Gorman TA, Haas CA, Bishop DC (2009) Factors related to occupancy of breeding wetlands by flatwoods salamander larvae. Wetlands 29:323–329
Gorman TA, Haas CA, Himes JG (2013) Evaluating methods to restore amphibian habitat in fire-suppressed pine flatwoods wetlands. Fire Ecol 9:96–109
Gorman TA, Powell SD, Jones KC, Haas CA (2014) Microhabitat characteristics of egg deposition sites used by reticulated flatwoods salamanders. Herpetol Conserv Bio 9:543–550
Graf RF, Mathys L, Bollman K (2009) Habitat assessment for forest dwelling species using LiDAR remote sensing: Capercaillie in the alps. For Ecol Manag 257:160–167
Greenberg CH, Goodrick S, Austin JD, Parresol BR (2015) Hydroregime prediction models for ephemeral groundwater-driven sinkhole wetlands: a planning tool for climate change and amphibian conservation. Wetlands 35:899–911
Guisan A, Broennimann O, Engler R, Vust M, Yoccoz NG, Lehmann A, Zimmermann NE (2006) Using niche-based models to improve the sampling of rare species. Conserv Bio 20:501–511
Haag KH, Lee TM, Herndon DC (2005) Bathymetry and vegetation in isolated marsh and cypress wetlands in the northern Tampa Bay Area, 2000–2004. U.S. Geological Survey Scientific Investigations Report 2005–5109, U.S. Geological Survey, Reston, VA
Hamer AJ, Heard GW, Urlus J, Ricciardello J, Schmidt B, Quin D, Steele WK (2016) Manipulating wetland hydroperiod to improve occupancy rates by an endangered amphibian: modelling management scenarios. J Appl Ecol 53:1842–1851
Hayashia M, van der Kamp G (2000) Simple equations to represent the volume–area–depth relations of shallow wetlands in small topographic depressions. J Hydrol 237:74–85
Herteux CE, Gawlik DE, Smith LL (2020) Habitat characteristics affecting wading bird use of geographically isolated wetlands in the U.S. southeastern Coastal Plain. Wetlands 40:1149–1159
Hood GA, Larson DG (2015) Ecological engineering and aquatic connectivity: a new perspective from beaver-modified wetlands. Freshw Biol 60:198–208
James SM, Semlitsch RD (2011) Terrestrial performance of juvenile frogs in two habitat types after chronic larval exposure to a contaminant. J Herpetol 45:186–194
Jenkins DG, Grissom S, Miller K (2001) Consequences of prairie wetland drainage for crustacean biodiversity and metapopulations. Conserv Bio 17:158–167
Jones KC, Hill P, Gorman TA, Haas CA (2012) Climbing behavior of flatwoods salamanders (Ambystoma bishopi/A. cingulatum). Southeast Nat 11:537–542
Jones CN, Scott DT, Guth C, Hester ET, Hession WC (2015) Seasonal variation in floodplain biogeochemical processing in a restored headwater stream. Environ Sci Technol 49:13190–13198
Jones CN, Evenson GR, McLaughlin DL, Vanderhoof MK, Lang MW, McCarty GW, Golden HE, Lane CR, Alexander LC (2018a) Estimating restorable wetland water storage at landscape scales. Hydrol Process 32:305–313
Jones CN, McLaughlin DL, Henson K, Haas CA, Kaplan DA (2018b) From salamanders to greenhouse gases: does upland management affect wetland functions? Front Ecol Environ 16:14–19
Kantrud HA, Stewart RE (1977) Use of natural basin wetlands by breeding waterfowl in North Dakota. J Wildl Manage 41:243–253
Kirkman LK, Goebel PC, West L, Drew MB, Palik BJ (2000) Depressional wetland vegetation types: a question of plant community development. Wetlands 20:373–385
Lane CR, D’Amico E (2016) Identification of putative geographically isolated wetlands of the conterminous United States. J Am Water Resour as 52:705–722
Leips J, McManus MG, Travis J (2000) Response of treefrog larvae to drying ponds: comparing temporary and permanent pond breeders. Ecology 81:2997–3008
Lukács BA, Sramkó G, Molnár VA (2013) Plant diversity and conservation value of continental temporary pools. Biol Conserv 158:393–400
Lumley T, Miller A (2020) Leaps: Regression subset selection. R package version 3.1. Available at: https://CRAN.R-project.org/package=leaps
Luo S, Wang C, Pan F, Xi X, Li G, Nie S, Xia S (2014) Estimation of wetland vegetation height and leaf area index using airborne laser scanning data. Ecol Indic 48:550–559
Malhotra A, Roulet NT, Wilson P, Giroux-Bougard X, Harris LI (2016) Ecohydrological feedbacks in peatlands: an empirical test of the relationship among vegetation, microtopography and water table. Ecohydrology 9:1346–1357
Martin KL, Kirkman LK (2009) Management of ecological thresholds to re-establish disturbance-maintained herbaceous wetlands of the south-eastern USA. J Appl Ecol 46:906–914
Martinuzzi S, Vierling LA, Gould WA, Falkowski MJ, Evans JS, Hudak AT, Vierling KT (2009) Mapping snags and understory shrubs for a LiDAR-based assessment of wildlife habitat suitability. Remote Sens Environ 113:2533–2546
Mathwin R, Wassens S, Young J, Ye Q, Bradshaw CJA (2020) Manipulating water for amphibian conservation. Conserv Biol 35:24–34
McLaughlin DL, Kaplan DA, Cohen MJ (2014) A significant nexus: geographically isolated wetlands influence landscape hydrology. Water Resour Res 50:7153–7166
McLean KI, Mushet DM, Newton WE, Sweetman JN (2021) Long-term multidecadal data from a prairie-pothole wetland complex reveal controls on aquatic-macroinvertebrate communities. Ecol Indic 126:107678
Minke AG, Westbrook CJ, van der Kamp G (2010) Simplified volume-area-depth method for estimating water storage of prairie potholes. Wetlands 30:541–551
O’Donnell KM, Messerman AF, Barichivich WJ et al (2017) Structured decision making as a conservation tool for recovery planning of two endangered salamanders. J Nat Conserv 37:66–72
Palis JG (1995) Larval growth, development, and metamorphosis of Ambystoma cingulatum on the Gulf Coastal Plain of Florida. Fla Sci 58:352–358
Park J, Botter G, Jawitz JW, Rao PSC (2014) Stochastic modeling of hydrologic variability of geographically isolated wetlands: effects of hydro-climatic forcing and wetland bathymetry. Adv Water Resour 69:38–48
Pearman PB (1993) Effects of habitat size on tadpole populations. Ecology 74:1982–1991
Pearman PB (1995) Effects of pond size and consequent predator density on two species of tadpoles. Oecologia 102:1–8
Pechmann JHK, Scott DE, Gibbons JW (1989) Influence of wetland hydroperiod on diversity and abundance of metamorphosing juvenile amphibians. Wetl Ecol Manag 1:3–11
Quadros ND, Collier PA, Fraser CS (2008) Integration of bathymetric and topographic lidar: a preliminary investigation. Int Arch Photogramm 37:315–320
R Core Team (2021) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria. https://www.R-project.org/
Renton DA, Mushet DM, DeKeyser ES (2015) Climate change and prairie pothole wetlands—Mitigating water-level and hydroperiod effects through upland management. U.S. Geological Survey Scientific Investigations Report 2015–5004
Riekerk H, Korhnak LV (2000) The hydrology of cypress wetlands in Florida pine flatwoods. Wetlands 20:448–460
Riley JW, Calhoun DL, Barichivich WJ, Walls SC (2017) Identifying small depressional wetlands and using a topographic position index to infer hydroperiod regimes for pond-breeding amphibians. Wetlands 37:325–338
Rundle WD, Fredrickson LH (1981) Managing seasonally flooded impoundments for migrant rails and shorebirds. Wildl Soc B 9:80–87
Russell KR, Hanlin HG, Wigley TB, Guynn DC (2002) Responses of isolated wetland herpetofauna to upland forest management. J Wildl Manage 66:603–617
Schuett MA, Selin SW, Carr DS (2001) Making it work: Keys to successful collaboration in natural resource management. Environ Manage 27:587–593
Seigel RA, Dinsmore A, Richter SC (2006) Using well water to increase hydroperiod as a management option for pond-breeding amphibians. Wildl Soc B 34:1022–1027
Sekerak CM, Tanner GW, Palis JG (1996) Ecology of flatwoods salamander larvae in breeding ponds in Apalachicola National Forest. Proc Annual Conf Southeast Association Fish Wildl Agencies 50:321–330
Semlitsch RD (1987) Relationship of pond drying to the reproductive success of the salamander Ambystoma talpoideum. Copeia 1987:61–69
Semlitsch RD (2000) Principles for management of aquatic-breeding amphibians. J Wildl Manage 64:615–631
Semlitsch RD, Scott DE, Pechmann JHK, Gibbons JW (1996) Structure and dynamics of an amphibian community: evidence from a 16-year study of a natural pond. In: Cody ML, Smallwood J (eds) Long-term studies of vertebrate communities. Academic Press, New York, pp 217–248
Skagen SK, Granfors DA, Melcher CP (2008) On determining the significance of ephemeral continental wetlands to north American migratory shorebirds. Auk 125:20–29
Skelly DK (1997) Tadpole communities: Pond permanence and predation are powerful forces shaping the structure of tadpole communities. Am Sci 85:36–45
Smith LL, Subalusky AL, Atkinson CL, Earl JE, Mushet DM, Scott DE, Lance SL, Johnson SA (2018) Biological connectivity of seasonally ponded wetlands across spatial and temporal scales. J Am Water Resour as 55:334–353
Snodgrass JW, Komoroski MJ, Bryan AL Jr, Burger J (2000) Relationships among isolated wetland size, hydroperiod, and amphibian species richness: implications for wetland regulations. Conserv Biol 14:414–419
Tarr TL, Baber MJ, Babbitt KJ (2005) Macroinvertebrate community structure across a wetland hydroperiod gradient in southern New Hampshire, USA. Wetl Ecol Manag 13:321–334
Tiner RW (2003) Geographically isolated wetlands of the United States. Wetlands 23:494–516
Uden DR, Hellman ML, Angeler DG, Allen CR (2014) The role of reserves and anthropogenic habitats for functional connectivity and resilience of ephemeral wetlands. Ecol Appl 24:1569–1582
Varner JM III, Gordon DR, Francis FE, Hiers JK (2005) Restoring Fire to long-unburned Pinus palustris ecosystems: novel Fire effects and consequences for long-unburned ecosystems. Restor Ecol 13:536–544
Walls SC, Barichivich WJ, Brown ME, Scott DE, Hossack BR (2013) Influence of drought on salamander occupancy of isolated wetlands on the southeastern Coastal Plain of the United States. Wetlands 33:345–354
Welborn GA, Skelly DK, Werner EE (1996) Creating community structure across a freshwater habitat gradient. Annu Rev Ecol Syst 27:337–363
Wilbur HM (1980) Complex life cycles. Annu Rev Ecol Syst 11:67–93
Wilbur HM (1987) Regulation of structure in complex systems: experimental temporary pond communities. Ecology 68:1437–1452
Wilbur HM (1997) Experimental ecology of food webs: Complex systems in temporary ponds. Ecology 78:2279–2302
Wilcox C, Huertos ML (2005) A simple, rapid method for mapping bathymetry of small wetland basins. J Hydrol 301:29–36
Williams WD (1985) Biotic adaptation in temporary lentic waters, with special reference to those in semi-arid and arid regions. Hydrobiologia 125:85–110
Winter TC (1988) A conceptual framework for assessing cumulative impacts on the hydrology of nontidal wetlands. Environ Manage 12:605–620
Winter TC, LaBaugh JW (2003) Hydrologic considerations in defining isolated wetlands. Wetlands 23:532–540
Wu Q (2020) whitebox: ‘WhiteboxTools’ R Frontend. R package version 1.3.0/r25. Available at: https://R-Forge.R-project.org/projects/whitebox/
Wu Q, Lane CR (2016) Delineation and quantification of wetland depressions in the Prairie Pothole Region of North Dakota. Wetlands 36:215–227
Wu Q, Lane CR (2017) Delineating wetland catchments and modeling hydrologic connectivity using lidar data and aerial imagery. Hydrol Earth Syst Sc 21:3579–3595
Yagi KT, Green DM (2018) Post-metamorphic carry-over effects in a complex life history: Behavior and growth at two life stages in an amphibian, Anaxyrus fowleri. Copeia 2018:77–85
Acknowledgements
We thank the many people that have assisted with this work, especially C. Abeles, R. Bilbow, G. Brooks, N. Caruso, T. Cianciolo, C. Ewers, R. Felix, S. Goodman, T. Gorman, B. Hagedorn, Y. Jiao, K. Jones, N. Jones, S. Laine, M. Mims, V. Porter, J. Preston, B. Rincon, and T. Williams. We thank the Natural Resources Branch of Eglin Air Force Base (Jackson Guard), Hurlburt Field, Department of Defense Legacy Resource Management Program, the U.S. Fish and Wildlife Service Panama City Field Office, Florida Fish and Wildlife Conservation Commission’s Aquatic Habitat Restoration and Enhancement program, and the Department of Fish and Wildlife Conservation at Virginia Tech for financial and logistical support of this project and ongoing flatwoods salamander conservation efforts. The manuscript was improved by comments from three anonymous reviewers.
Funding
This work was supported by the Department of Defense Strategic Environmental Research and Development Program (RC-2703) and the USDA National Institute of Food and Agriculture, McIntire Stennis project 1024640.
Author information
Authors and Affiliations
Contributions
HCC, DLM, and CAH contributed to the conceptualization, development of methods, data interpretation, and writing of the manuscript. HCC performed data analysis and prepared figures and tables for publication. All authors have read and approved the manuscript for publication.
Corresponding author
Ethics declarations
Competing Interests
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic Supplementary Material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Chandler, H.C., McLaughlin, D.L. & Haas, C.A. Informing the Conservation of Ephemerally Flooded Wetlands Using Hydrologic Regime and LiDAR-Based Habitat Assessments. Wetlands 44, 33 (2024). https://doi.org/10.1007/s13157-023-01767-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13157-023-01767-3