
Abstract
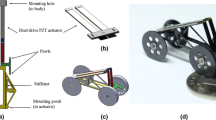
Inspired by the fast, agile movements of insects, we present a 1.9 g, 4.5 cm in length, piezoelectrically driven, quadrupedal microrobot. This microrobot uses a novel spatial parallel mechanism as its hip joint, which consists of two spatially orthogonal slider-crank linkages. This mechanism maps two inputs of two independent actuators to the decoupled swing and lift outputs of a leg, and each leg can produce the closed trajectories in the sagittal plane necessary for robot motion. Moreover, the kinematics of the transmission are analyzed, and the parameters of the flexure hinges are designed based on geometrical constraints and yield conditions. The hip joints, legs and exoskeletons are integrated into a five-layer standard laminate for monolithic fabrication which is composed of two layers of carbon fiber, two layers of acrylic adhesive and a polyimide film. The measured output force (15.97 mN) of each leg is enough to carry half of the robot’s weight, which is necessary for the robot to move successfully. It has been proven that the robot can successfully perform forward and turning motions. Compared to the microrobot fabricated with discrete components, the monolithically fabricated microrobot is more capable of maintaining the original direction of locomotion when driven by a forward signal and has a greater speed, whose maximum speed is 25.05 cm/s.


















Similar content being viewed by others

Availability of Data and Materials
The data that support the findings of this study are not openly available due to some restrictions and are available from the corresponding author upon reasonable request.
References
Phan, H. V., Nguyen, Q. V., Truong, Q. T., Truong, T. T., Park, H. C., Goo, N. S., Byun, D., & Kim, M. J. (2012). Stable vertical takeoff of an insect-mimicking flapping-wing system without guide implementing inherent pitching stability. Journal of Bionic Engineering, 9, 391–401.
Casanova, R., Diéguez, Á., Arbat, A., Alonso, O., Sanuy, A., Canals, J., Colomer, J., & Samitier, J. (2009). Integration of the control electronics for a mm3-sized autonomous microrobot into a single chip. In 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan (pp. 3007–3012).
Churaman, W. A., Gerratt, A.P., & Bergbreiter, S. (2011). First leaps toward jumping microrobots. In 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, America (pp. 1680–1686).
Hoover, A. M., Burden, S., Fu, X. Y., Sastry, S. S., & Fearing, R. S. (2010). Bio-inspired design and dynamic maneuverability of a minimally actuated six-legged robot. In 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Tokyo, Japan (pp. 869–876).
Pullin, A. O., Kohut, N. J., Zarrouk, D., & Fearing, R. S. (2012). Dynamic turning of 13 cm robot comparing tail and differential drive. In 2012 IEEE International Conference on Robotics and Automation, Saint Paul, America (pp. 5086–5093).
Haldane, D. W., Peterson, K. C., Fernando, L., Bermudez, G. & Fearing, R. S. (2013). Animal-inspired design and aerodynamic stabilization of a hexapedal millirobot. In 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany (pp. 3279–3286).
Casarez, C. S. & Fearing, R. S. (2018). Steering of an underactuated legged robot through terrain contact with an active tail. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain (pp. 2739–2746).
Karakadioğlu, C., Askari, M., & Özcan, O. (2017). Design and operation of miniaq: an untethered foldable miniature quadruped with individually actuated legs. In 2017 IEEE International Conference on Advanced Intelligent Mechatronics, Munich, Germany (pp. 247–252).
Askari, M., Karakadioğlu, C., Ayhan, F., & Özcan, O. (2017). MinIAQ-II: a miniature foldable quadruped with an improved leg mechanism. In 2017 IEEE International Conference on Robotics and Biomimetics, Macau, China (pp. 19–25).
Askari, M., Ugur, M., Mahkam, N., Yeldan, A., & Özcan, O. (2023). Control and study of bio-inspired quadrupedal gaits on an underactuated miniature robot. Bioinspiration & Biomimetics, 18(2), 026004.
Güç, A. F., Kalin, M. A. İ., Karakadioğlu, C., & Özcan, O. (2017). C-quad: a miniature, foldable quadruped with c-shaped compliant legs. In 2017 IEEE International Conference on Robotics and Biomimetics, Macau, China (pp. 26–31).
Kalin, M. A. İ, Aygül, C., Türkmen, A., Kwiczak-Yiğitbaşı, J., Baytekin, B., & Özcan, O. (2020). Design, fabrication, and locomotion analysis of an untethered miniature soft quadruped, SQuad. IEEE Robotics and Automation Letters, 5(3), 3854–3860.
Hoover, A. M., Steltz, E., & Fearing, R. S. (2008). RoACH: An autonomous 2.4 g crawling hexapod robot. In 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France (pp. 26–33).
Tanaka, D., Uchiumi, Y., Kawamura, S., Takato, M., Saito, K., & Uchikoba, F. (2017). Four-leg independent mechanism for MEMS microrobot. Artificial Life and Robotics, 22(3), 380–384.
Sugita, K., Tanaka, T., Nakata, Y., Takato, M., Saito, K., & Uchikoba, F. (2017). Hexapod type MEMS microrobot equipped with an artificial neural networks IC. Journal of Robotics, Networking and Artificial Life, 4(1), 28–31.
Ohara, M., Kurosawa, M., Sasaki, T., Tanaka, T., Kawamura, S., Hayakawa, Y., & Noguchi, D. (2019). Development of hardware neural networks IC with switchable gait pattern for insect-type microrobot. In 2019 IEEE/SICE International Symposium on System Integration, Paris, France (pp. 663–668).
Zheng, Z. Y., Zhao, Y. R., & Wang, G. (2023). Research on piezoelectric driving microminiature three-legged crawling robot. Journal of Bionic Engineering, 20(4), 1481–1492.
Ozcan, O., Baisch, A. T., & Wood, R. J. (2013). Design and feedback control of a biologically-inspired miniature quadruped. In 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan (pp. 1438–1444).
Seitz, B. F., Goldberg, B., Doshi, N., Özcan, O., Christensen, D. L., Hawkes, E. W., Cutkosky, M. R., & Wood, R. J. (2014). Bio-inspired mechanisms for inclined locomotion in a legged insect-scale robot. In 2014 IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia (pp. 791–796).
de Rivaz, S. D., Goldberg, B., Doshi, N., Jayaram, K., Zhou, J., & Wood, R. J. (2018). Inverted and vertical climbing of a quadrupedal microrobot using electroadhesion. Science Robotics, 3(25).
Chen, Y., Doshi, N., & Wood, R. J. (2020). Inverted and inclined climbing using capillary adhesion in a quadrupedal insect-scale robot. IEEE Robotics and Automation Letters, 5(3), 4820–4827.
Dharmawan, A. G., Hariri, H. H., Soh, G. S., Foong, S., & Wood, K. L. (2018). Design, analysis, and characterization of a two-legged miniature robot with piezoelectric-driven four-bar linkage. Journal of Mechanisms Robotics, 10(2), 021003.
Rios, S. A., Fleming, A. J., & Yong, Y. K. (2016). Miniature resonant ambulatory robot. IEEE Robotics and Automation Letters, 2(1), 337–343.
Rios, S. A., Fleming, A. J., & Yong, Y. K. (2018). Monolithic piezoelectric insect with resonance walking. IEEE/ASME Transactions on Mechatronics, 23(2), 524–530.
Liu, Y., Li, J., Deng, J., Zhang, S., Chen, W., Xie, H., & Zhao, J. (2021). Arthropod-metamerism-inspired resonant piezoelectric millirobot. Advanced Intelligent Systems, 3, 2100015.
Wang, Y., Wang, B., Zhang, Y., Wei, L., Yu, C., Wang, Z., & Yang, Z. (2022). T-phage inspired piezoelectric microrobot. International Journal of Mechanical Sciences, 231, 107596.
Baisch, A. T., & Wood, R. J. (2013). Pop-up assembly of a quadrupedal ambulatory microrobot. In 2013 IEEE/RSJ International Conference on Intelligent Robots and Sytems, Tokyo, Japan (pp. 1518–1512).
Wood, R. J., Avadhanula, S., Sahai, R., Steltz, E., & Fearing, R. S. (2008). Microrobot design using fiber reinforced composites. Journal of Mechanical Design, 130(5), 052304.
Edwards, B. T., Jensen, B. D., & Howell, L. L. (2001). A pseudo-rigid-body model for initially-curved pinned-pinned segments used in compliant mechanisms. Journal of Mechanical Design, 123(3), 464–472.
Wood, R. J., Steltz, E., & Fearing, R. S. (2005). Optimal energy density piezoelectric bending actuators. Sensors and Actuators A: Physical, 119(2), 476–488.
Jafferis, N., Smith, M., & Wood, R. J. (2015). Design and manufacturing rules for maximizing the performance of polycrystalline piezoelectric bending actuators. Smart Materials and Structures, 24(6), 065023.
Goldberg, B., Doshi, N., & Wood, R.J. (2017). High speed trajectory control using an experimental maneuverability model for an insect-scale legged robot. In 2017 IEEE International Conference on Robotics and Automation, Singapore (pp. 3538–3545).
Acknowledgements
This research was supported by the Shanghai professional technology service platform under Grant 19DZ2291103.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file1 (MP4 1020 KB)
Supplementary file2 (MP4 1485 KB)
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wu, G., Wang, Z., Zhao, J. et al. A Piezoelectrically Driven Microrobot Using a Novel Monolithic Spatial Parallel Mechanism as Its Hip Joint. J Bionic Eng 21, 803–820 (2024). https://doi.org/10.1007/s42235-024-00484-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42235-024-00484-9