
Abstract
The main objective of the current investigation is to study the dynamic behaviour of a 3-pile group with different loading direction under coupled (horizontal and rocking) excitations. To accomplish this objective, machine-induced field excitation tests are conducted on small-scale hollow steel piles. The 3-pile group is driven into the ground in a triangular arrangement with 3d spacing. Two different soil-pile setups, i.e., Pile Group-I and Pile Group-II, are created based on dynamic force directions. In the case of Pile Group-I, the forces are applied to the direction of the median of the triangle, and for Pile Group-II, the forces are applied to other directional loads. From the test results, it is found that the resonant peaks of horizontal and rocking amplitudes for Pile Group-I are lower than Pile Group-II. In the case of resonant frequencies, the values of Pile Group-I are observed to be the same or a little bit higher as compared to Pile Group-II. It is found that the dynamic soil-pile-soil interaction effect is more prominent for Pile Group-II than for Pile Group-I. For numerical investigation, the continuum approach method is utilised with the inclusion of a dynamic group interaction factor to predict the dynamic coupled responses in terms of frequency and amplitude for these two soil-pile setups. To understand the behaviour of pile groups, boundary zone parameters and variations of impedance parameters (stiffness and damping) with operating frequencies are also measured using this theoretical approach.
Similar content being viewed by others


Introduction
In the last few decades, many researchers have been working in the field of pile dynamics to better understand soil-pile behaviour under dynamic conditions and to predict its nonlinear responses under different modes of dynamic forces. Generally, these dynamic forces or vibrations (vertical, horizontal, rocking, or torsional) are generated due to seismic wave action or machine excitations. In machine-based industries or socioeconomic sectors like hydro/nuclear power plants, the petro-chemical sector, oil refinery industries, etc., mostly turbines, turbo generators, and rotary compressors are used, which generate high magnitudes of vertical or coupled (horizontal and rocking) vibrations. To encounter these vibrating forces, it demands more stable machine foundation systems, which have rapidly increased in the last few years. In this machine-based foundation, the use of piles is found to be a more effective and preferred solution. The amplitudes of vibrations of the pile-supported machine foundations must be constructed such that they do not exceed the limitation amplitude within the range of the operating frequency of the machines. To achieve this condition in practical design, it is essential to know the frequency-amplitude response of the pile foundation. These frequency-amplitude responses under dynamic situations is highly affects due to interaction between the piles and the surrounding soil. This interaction modifies the stiffness of the piles and generates damping through energy radiation to infinity (geometric damping) and energy dissipation due to imperfect elasticity of the soil (material or hysteretic damping). Complex stiffness often referred to as impedance functions at the pile head, can be used to characterize these occurrences.
Experimental investigations are almost compulsory to understand soil-pile interaction and its dynamic responses under the influence of impedance parameters for pile groups. In the past few decades, many field or laboratory vibration tests have been performed on small-scale piles due to the lower requirements of cost and effort. In order to research and study a linear-elastic theoretical approach, Novak and Grigg [17] conducted the dynamic tests on a model pile. From the experimental results, it was observed that the nonlinear response may be measured with the inclusion of static pile group interaction factors developed by Poulos [13] for small-scale model piles. El Marsafawi et al. [7] conducted dynamic tests on piles for different soil strata under dynamic loading to study the behaviour of pile groups under dynamic loading. Similar types of experiments were done by Burr et al. [3] on various small-scale soil-pile setups in varying soil layers to study the influence of soil-pile spacing to diameter ratio on the nonlinear response of piles. Further, these dynamic results are studied under harmonic vibration and analytically with the use of the continuum approach method by Elkasabgy and El Naggar [5] and Sinha et al. [21] to know the effect on soil nonlinearity subjected to dynamic excitation and the combined soil-pile responses in terms of frequency and amplitude and their influence on impedance parameters. Some other researchers [1, 6, 12, 14] also worked in this area and did experimental field and laboratory tests on different setups and compared their datasets with the theoretical curves measured from the continuum approach. This theoretical approach is also used for the study of stiffness and damping with a combination of soil and pile under varying frequencies. After comparing field datasets with the analysis results, it was found that the horizontal and rocking response curves are reasonably predicted by the continuum approach method under machine vibrations. Such an agreement was established with the inclusion of a boundary zone around the piles and soil-pile separation lengths.
The numerical investigation must provide insight into the actual nonlinear phenomena observed at the site of dynamic pile tests. Considering all the different numerical solutions to analyse the machine-based pile foundation subjected to dynamic forces, the continuous approach solution is found to be highly promising and widely recommended by many researchers due to the inclusion of nonlinear functions and parameters in dynamic cases. To estimate the soil nonlinearity with pile-soil separation, Novak and Sheta [20] investigated the soil-pile model by including an equivalent nonlinear solution under the continuum approach method. Later, Kaynia and Kausel [10] suggested an approach based on static interaction factors to derive frequency-dependent dynamic interaction factors for various types of excitation modes. Dobry and Gazetas [4] also suggested a deceptively easy method for determining the dynamic interaction variables in homogeneous soil. Makris and Gazetas [11] extended this research by computing the dynamic interaction variables for non-homogeneous soil. To forecast the dynamic reaction of pile foundations, Novak and his co-workers combined the continuum method and the superposition method into a computer coding programme. Han and Sabin [9] suggested another soil model to accurately estimate the dynamic soil stiffness by proposing a parabolic variation of soil shear modulus in the inner soil-pile model zone. Novak and Mitwally [18] introduced a superposition method with the inclusion of a continuum approach and dynamic interaction factors to assess pile group stiffness.
The machine vibration under dynamic conditions is still very complex, and more studies are required to understand the mechanism involved in pile-soil-pile interaction. The experimental results on pile foundations under horizontal and rocking vibration are not reported enough in the literature, especially in pile groups. Therefore, the present study focuses on the coupled (horizontal and rocking) vibration field tests and numerical analysis (continuum method) performed on two different sets of 3-pile groups (Pile Group-I and Pile Group-II) to analyse the impact of the group interaction effect on piles in terms of nonlinear response under two sets of pile loading condition (or direction). From the theoretical solution, variations of the dynamic parameters responsible for the nonlinear soil-pile response are studied and described in the current study. The variations of stiffness and damping with operating frequency for pile groups are also studied under varying eccentric forces and excitation modes.
Soil properties and site details
The horizontal and rocking field excitation tests are conducted at I.I.T. Delhi (India) campus. These tests have been performed on two different sets of 3-pile groups, which have different pile arrangements. The SPT is conducted, and soil samples are collected from the borehole at the site, which is located at a latitude of 28°32′44.3" north and a longitude of 77°11′28.8" east. From the field and laboratory test results, it is found that the soil has two layers. The first layer (0–3.5 m) from the top of the ground level contains sand (39%), silt (43%), and clayey soil (18%), and the second layer (3.5-6.5 m) contains gravel (3%), sand (36%), silt (42%), and clayey soil (19%). The soil particles are low in plasticity and also represent a clayey silt type of soil. The soil profile is presented in Fig. 1, and soil properties are listed in Table 1.

Variation of soil layer, SPT-Ncorr, and shear wave velocity
The modulus of elasticity (E) and undrained shear strength (Su) based on SPT-N value of soil is determined from Bowel (1996) correlation:
These computed ‘E’ values are further used to calculate the shear modulus (G) of soil, where the Poisson’s ratio (μ) has considered 0.3 for both layers and by using ‘G’ and ‘ρ’ (mass density of soil) values, the shear wave velocities (Vs) are determined:
Experimental details
Pile installation
The small-scale hollow steel model pipes are driven into the natural soil deposit with the help of a SPT hammer. The pipe's outer diameter (d) is 0.114 m, its length is 3.0 m, and its thickness is 0.003 m. Before driving, boreholes of 0.1 m diameter are constructed with the help of a hand augur. A 3D spacing is maintained during the construction of pile groups. The test piles are closed-ended with a circular steel plate. The elastic modulus and Poisson’s ratio of the steel pile are considered to be 2 × 108 kPa and 0.3, respectively. A square steel plate with dimensions of 0.9 m width, 0.9 m length, and 0.037 m height is used as a pile cap. The piles and pile caps are tightly connected to each other with the help of screw connectors. After the completion of pile driving, a waiting period of 2 months is imposed to permit the recovery of the soil to its natural condition. The steps of the installation process are presented in Fig. 2.

The stepwise installation process of 3-pile group: a Construction of Boreholes b Driving of piles by SPT hammer c Driven piles and pile cap
Machine ınduced coupled excitation
A mechanical oscillator with varying eccentric moments produces dynamically coupled (horizontal and rocking) excitation forces on pile foundations. The two spinning masses are maintained on the same vertical plane in the mechanical oscillator for the generation of coupled vibration forces. In Fig. 3, an oscillator with rotating masses and force directions is shown. The eccentricity (θ) of the spinning masses is adjusted by the outside screw included in the oscillator to regulate the magnitudes of the forces. The produced eccentric moments (m.e) can be expressed as:

Oscillator with rotating masses and force direction
The eccentricity-based harmonic vibration force (P) at the operating frequency may be expressed as follows:
where, W and m indicate the weight and mass of eccentric spinning portions, ‘e’ represent the eccentric spacing of the rotating masses, ‘g’ represent a gravity's acceleration, ‘ω’ represent a circular frequency and ‘t’ represent time. In Table 2, the angles of eccentric mass are presented for four distinct eccentric forces.
Two different arrangements of the triangular pile group are created by applying horizontal loading in two different directions that are perpendicular to each other. Pile Group-I is the group where load is applied in the direction of the median of the triangle, and Pile Group-II is the group where load is applied in the perpendicular direction of the median (Fig. 4). After the rest period is over, a square steel pile cap (90 cm × 90 cm × 3.7 cm) is connected and rested on top of the piles. To apply the desired static weight to the pile group, steel plates (50 cm × 50 cm × 2.2 cm) are put on the pile cap to bring the resonant frequencies of the combined system within the operating frequency range of the exciter, i.e., 0 to 50 Hz. The coupled excitation tests, i.e., in horizontal as well as rocking modes, are conducted on two different sets of 3-pile groups (Pile Group-I and Pile Group-II) under 10 kN and 14 kN static loads (Ws), which include the pile cap, steel plates, and oscillator weights. After that, the mechanical oscillator is placed on top and in the centre of the loading setup. The complete loading system is tightly combined with rods and bolts so that it acts as a single unit. The flexible shaft is used for the transfer of forces from a 5-hp DC motor to an oscillator by connecting two of them. During the dynamic field test, two accelerometers (one for the horizontal component and the other for the rocking component) are used to measure the acceleration of the complete soil-pile setup. To measure the horizontal amplitudes, one accelerometer is mounted at the pile cap-loading system's centre of gravity (C.G.). The second accelerometer is mounted on top at a known, measured distance. To record system acceleration, the opposite ends of these accelerometers are linked to a data acquisition system. To detect the operational frequency when the system is excited, one frequency measurement sensor is connected to the outer part of the motor. The data accusation system records the created time history data sets on a laptop. These configurations are investigated for four different eccentric moments, or, in other words, excitation forces (W.e) which vary from 0.868 Nm to 1.944 Nm.

Schematic diagram of 3-pile group
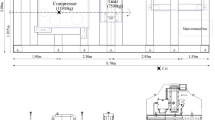
The dynamic responses of both soil-pile loading systems are independently measured under horizontal and rocking modes of excitation in terms of frequency and amplitude at different operating frequencies. Figure 5 depicts the dynamic field test and a schematic diagram of the soil-pile setup.

Complete coupled excitation testing setup a Actual field setup b Schematic diagram
The schematic figure of the loading assembly for the coupled excitation test is presented in Fig. 6. The height of C.G. (centre of gravity) above base (Zc) and the height of excitation force above C.G. (Ze) for different static loads are listed in Table 3. The Zc and Ze values change with the change in static load. The static load is increased or decreased by increasing or decreasing the number of steel plates, and thus Zc and Ze are varied accordingly. Therefore, the magnitude and direction of moments that are produced at the C.G. of the pile-cap loading system due to the horizontal excitation force are different for the entire load.

Schematic diagram of coupled excitation loading system
Field test results
At a static load of 10 kN, the dynamic frequency-amplitude responses of Pile Group-I are shown in Fig. 7a, b for horizontal and rocking excitation modes, respectively. For two different resonant frequencies in the frequency range of 0–50 Hz, two distinct resonant peaks are seen. The first resonant peak of the coupled response is less dominated by the rocking component as the horizontal translation is quite high. However, completely opposite behaviours are observed for the second peak. The field test results of both pile groups further demonstrate that, in both horizontal and rocking modes of excitation, amplitude values are not proportional to eccentric moments and that resonant frequencies decrease as eccentric moments increase.

Dynamic field response of pile group in terms of frequency-amplitude for 10 kN static load subjected to coupled excitation a Horizontal mode b Rocking mode
For instance, the eccentric moment rise from 0.868 Nm to 1.944 Nm (= 2.2 times), which resulted in a drop in the resonance frequency of the first peak for Pile Group-I from 9.5 to 7.5 Hz. With an increase in eccentric moment, the initial peak of the horizontal and rocking resonant amplitudes are progressively increased from 0.368 to 0.955 mm (= 2.6 times) and 0.00013 to 0.00044 Rad (= 3.4 times), respectively (0.868 Nm to 1.944 Nm). These results show that soil-pile systems exhibit nonlinear behaviour when coupled excitation is applied.
Numerical study
To estimate the machine-based nonlinear coupled response of piles, a numerical study is performed with the use of a software programme known as DYNA 5 [16]. The software application uses the continuum technique and the superposition method to calculate the stiffness and damping of the pile group. Analysis of the dynamically coupled reactions of a single pile takes into account the soil's linear elastic behaviour [15]. Using the wave propagation theory, the stiffness of the soil medium is estimated in complex form [19], where the real component shows soil stiffness and the imaginary part shows soil damping. Owing to the non-linear nature of soil behaviour, a modified equivalent linear soil model [20] is used to account for the separation between the pile and soil at the top layer of ground as well as the progressive yielding of soil around the pile as excitation levels grow. In this soil model, a cylindrical boundary zone across the pile was proposed to prevent wave reflection from the fictitious interface between the cylindrical zone and the outer region. This zone is characterised by reduced shear modulus and increased damping relative to the outer free-field with no soil mass (Fig. 8). The complex dynamic stiffness of the composite medium is calculated using wave equations when these compatibility requirements are applied at the boundary of the two zones. Based on the border zone characteristics (shear modulus reduction ratio (Gm/G), soil damping (Dm), thickness ratio (tm/R), and soil-pile separation lengths, ls), dynamic impedance parameters vary.

Schematic diagram of the soil-pile model for nonlinear analysis
The dynamic soil stiffness of the composite medium may be expressed as follows for coupled modes:
where Su1, Sψ1 and Su2, Sψ2 represent the stiffness and damping functions of the complex horizontal (Ku) and rocking (Kψ) soil stiffness, respectively. “Gm” stands for shear modulus. “tm” and “Dm” stand for thickness and damping ratio, respectively, while “νm” is the Poisson's ratio of the area of soil around the pile. The soil's shear-wave velocity is denoted by the ratio Rω/Vs, where Vs is the dimensionless frequency. “R” stands for the pile's radius, while “G” stands for the soil's shear modulus. For successful application of soil nonlinearity in place of the linear complex stiffness and determination of complex stiffness of piles, this equivalent linear complex soil stiffness and superposition method [18] with dynamic interaction factors of individual piles in a group is incorporated into this theoretical approach without any further theoretical adjustments. All these described and developed numerical solutions are composed in a software package called DYNA 5. In the present study, this software is used for the investigation of machine-based coupled responses to two different arrangements of soil-pile models with the same pile numbers.
Boundary zone parameters
The findings of the in-situ tests show that the soil-pile system behaves nonlinearly in nature. To ascertain the dynamic nonlinear horizontal and rocking responses of the soil-pile model after incorporating boundary zones in the continuum technique, theoretical analysis has therefore been carried out in the current inquiry with the aid of an analogous linear soil model. Since the mechanism involved in predicting an accurate boundary zone is difficult in the absence of test or laboratory results because of the insufficient guidelines, As a result, a trial-and-error method is used to forecast these zone characteristics based on the ranges offered by other researchers [5, 8, 21, 22]. The values of soil characteristics in the border zone are modified for different excitation intensities until the best agreement between the experimental and numerical data is obtained. As shown in Fig. 9, the values of the thickness ratio (tm/R) with weak zone soil damping (Dm) decrease with depth while the shear modulus ratios (Gm/G) increase. However, in case of eccentric moments, the Gm/G values decrease while Dm and tm/R values increase with the increase of eccentric moments. This pattern shows that when eccentric moments or excitation forces increase, the boundary zone or gap between the pile and soil gradually expands. In this method, the Gm/G ratio is assumed to be zero in the uppermost soil layers before introducing the soil-pile separation length. Different separation lengths are taken under four different eccentric moments because it is expected that the gap between the pile and the surrounding soil will increase with eccentric moments (W.e.). To analyse this soil-pile model, the separation lengths are taken as 1.4d (= 160 mm), 1.55d (= 177 mm), 1.7d (= 194 mm) and 1.84d (= 210 mm) for W.e (eccentric moment) of 0.868 Nm, 1.269 Nm, 1.631 Nm and 1.944 Nm respectively. It is also noted that the soil-pile stiffness of the group pile model decreases when the shear modulus, boundary zone thickness, and separation length are increased. However, in the case of soil-pile damping, the values increase with all these factors except the separation length of the soil-pile system.

Variations of boundary zone parameters with depth
Impedance of soil-pile systems
After combining the most practical adaptations of the previously given boundary zone parameters for horizontal as well as rocking modes of excitation, the stiffness and damping of the soil-pile system with distinct pile group arrangements (Pile Group-I and Pile Group-II) are determined. Figures 10 and 11 provide a comparison of the impedance parameters of Pile Group-I and Pile Group-II for the horizontal and rocking excitations, respectively. The numerical results demonstrate that the stiffness and damping values of the Pile Group-I are larger than those of the Pile Group-II for both excitation modes, despite the input boundary zone parameter variations being the same in both sets under a certain eccentric moment. This occurrence suggests that the Pile Group-II is more affected by the dynamic pile-soil-pile interaction than the Pile Group-I. According to the figures, the stiffness and damping of lower eccentric forces vary more than those of higher eccentric forces, making the interaction effects at lower eccentric forces very important. Changes in stiffness values are observed to be more noticeable than damping values under both modes due to the interaction effect. In the case of the pile-soil-pile interaction effect, the reduction in stiffness values is likewise observed to be larger in the rocking than in the horizontal excitation. As shown in the figures, the stiffness and damping values of both excitation modes decrease as the eccentric force and operating frequency increase.

Variation of soil-pile system a Stiffness and b Damping of the Pile group I and Pile group II under horizontal excitation

Variation of soil-pile system a Stiffness and b Damping of the Pile group I and Pile group II under rocking excitation
As compared to stiffness values under couple excitation, variations in damping values with changes in eccentric forces are less. Due to the rapid transition of frequency-independent soil material damping into frequency-dependent equivalent viscous damping with the increase in frequency, as shown in the frequency-damping curves, the damping of the system rapidly increases as the frequency approaches near zero.
Comparison between experimental and numerical results
In both soil-pile setups, the dynamic nonlinear frequency-amplitude responses are evaluated in the field and predicted using numerical analysis with the help of DYNA 5 software by taking boundary zone parameters and separation lengths into account. With a static load of 14 kN, the measured theoretical responses of Pile Groups I and II are compared with the observed field responses, as shown in Figs. 12 and 13. These comparisons are made for horizontal and rocking excitations, respectively. From the comparison curves, it can be shown that the field test findings under coupled (horizontal and rocking) stimulation adequately match the theoretical frequency-amplitude responses. Also, when the resonant frequencies decrease and amplitudes increase with eccentric forces, the dynamic test results of both the computational and field techniques also show nonlinear behaviour of soil-pile systems. Both the 1st and 2nd peaks of resonant amplitudes in Pile Group-I are found to be lower than in Pile Group-II under horizontal as well as rocking modes. However, in the case of resonant frequencies (both peaks) for Pile Group-I, the values are found to be equal to or a little bit higher than Pile Group-II. Similar patterns are observed for all the eccentric moments and static loads.

Comparison of experimental and numerical results obtained for 14 kN static load under horizontal excitation a Pile group I and b Pile group II

Comparison of experimental and numerical results obtained for 14 kN static load under rocking excitation a Pile group I and b Pile group II
As per the test results, the influence of dynamic soil-pile-soil interaction is more noticeable in Pile Group-II than in Pile Group-I. It can also be understood that the arrangement of Pile Group-I is a more efficient choice under machine-induced coupled excitation than Pile Group-II. Tables 4 and 5 present a comparison of resonant frequencies with corresponding amplitudes for Pile Group-I and Pile Group-II obtained from field and numerical analysis under static loads of 10 kN and 14 kN, respectively. Because of the dynamic group interaction effect, distinct resonant frequencies with corresponding amplitudes for Pile Group-I and Pile Group-II are obtained. Differences between both pile setups are found with respect to resonant frequencies and amplitudes. From the tabular results, it is found that the values of amplitude for Pile Group-I are greater as compared to Pile Group-II by 6–13% for horizontal excitation and 16–50% for rocking excitation, comparing both field and numerical results. This is because Pile Group-I influence on the dynamic pile-soil-pile interaction is stronger than that of Pile Group-II. The group interaction effect, however, causes the resonance frequencies of the Pile Group-II to be 3%-8% lower than those of the Pile Group-I. With an increase in static load, the varied trend in resonant frequencies and amplitudes increases, indicating the right trend in response curves. The values of the resonant frequency and amplitude are shown to decrease for both soil-pile configurations when the static load is increased from 10 to 14 kN, as shown in the tabular data set.
Conclusions
The dynamic behaviour of a 3-pile group with two different soil-pile arrangements (Pile Group-I and Pile Group-II) is investigated under field and numerical methods for coupled (horizontal and rocking) excitation tests. Based on the experimental and numerical analyses, the important influencing parameters are identified and the soil-pile stiffness and damping are also estimated to determine the responses of modal piles under horizontal and rocking excitations. The following conclusions are being drawn based on this study:
-
The results from both the experimental and numerical analyses of the two sets of pile loading direction setups demonstrate the nonlinear behaviour of the soil-pile system under coupled (horizontal and rocking) excitation. Experimental results revealed a resonant frequency variation of 9.50–7.50 Hz and 6.50–8.0 Hz for static loads of 10 kN and 14 kN, respectively, for the lowest to highest eccentric moment. These decrements in resonant frequency with the increase of static loads indicate the correct trend of dynamic test results.
-
It can be observed that the pile arrangement with the same number of piles has a considerable impact on frequency-amplitude responses due to variation in the stiffness and damping of the pile group systems. Considering the present case, the Pile Group-II exhibits slightly higher resonant amplitudes and lower resonant frequencies than the Pile Group-I under all eccentric moments, indicating that the Pile Group-II is more influenced by the dynamic pile-soil-pile interaction phenomenon than the Pile Group-I.
-
An accurate prediction of the nonlinear response of the piles under dynamic circumstances may be made with an acceptable assumption of the boundary zone parameters and soil-pile separation lengths. Until the optimum match between the experimental and numerical results is determined, alternative combinations of the boundary zone parameters may be attained for different eccentric moments.
-
This study predicts one likely range of boundary zone characteristics for the range of eccentric moments (0.868 Nm–1.944 Nm), where the shear modulus ratios (Gm/G) varies from 0.003 to 0.312, the thickness ratio (tm/R) varies from 0.3 to 1.1, and the soil damping (Dm) varies from 0.14 to 0.38.
-
It is also observed that for both sets of pile loading directions, soil-pile stiffness and damping decrease with the increase of eccentric forces. The primary cause of these decrements is the growth and development of the weak zone of soil surrounding the pile. The rate of change in horizontal and rocking damping values with frequency is found to be more significant as compared to the values of horizontal and rocking stiffness.
Data availability
Not applicable.
References
Biswas S, Manna B (2018) Experimental and theoretical studies on the nonlinear characteristics of soil-pile systems under coupled vibrations. J Geotech Geoenviron Eng ASCE 144(3):1–14. https://doi.org/10.1061/(ASCE)GT.1943-5606.0001850
Bowles JE (1996) Foundation analysis and design, 5th edn. The McGraw-Hill Companies Inc, New York
Burr JP, Pender MJ, Larkin TJ (1997) Dynamic response of laterally excited pile groups. J Geotech Geoenviron Eng ASCE 123(1):1–8
Dobry R, Gazetas G (1988) Simple method for dynamic stiffness and damping of floating pile groups. Geotechnique 38(4):557–574
Elkasabgy M, El Naggar MH (2013) Dynamic response of vertically loaded helical and driven steel piles. Can Geotech J 50:521–535
Elkasabgy M, El Naggar MH (2018) Lateral vibration of helical and driven steel piles installed in cohesive soils. J Geotech Geoenviron Eng ASCE 144(9):1–8
El Marsafawi H, Han YC, Novak M (1992) Dynamic experiments on two pile groups. J Geotech Eng ASCE 118(4):576–592
Han YC, Novak M (1988) Dynamic behavior of single piles under strong harmonic excitation. Can Geotech J 25:523–534
Han YC, Sabin GCW (1995) Impedances of radially inhomogeneous viscoelastic soil media. J of Eng Mech ASCE 121(9):939–947
Kaynia AM, Kausel E (1982) Dynamic behavior of pile groups. 2nd Int. Conf. on Numerical Methods in Offshore Piling. 509–532.
Makris N, Gazetas G (1992) Dynamic pile-soil-pile interaction part II: lateral and seismic response. Earthquake Eng Struct Dyn 21(2):145–162
Kumar A, Choudhary SS, Burman A (2022) Machine induced vertical responses of single and pile group—experimental and theoretical study. Int J Geotech Earthq Eng 13(1):1–17. https://doi.org/10.4018/IJGEE.298989
Poulos HG (1971) Behaviour of laterally loaded piles II: pile groups. J Soil Mech Found Eng ASCE 97(SM5):733–751
Ralli R, Manna B, Datta M (2022) Dynamic behavior of single steel-driven vertical and batter piles under horizontal excitations: field model testing. J Geotech Geoenviron Eng ASCE 148(1):1–25
Novak M, Aboul-Ella F (1978) Impedance functions for piles embedded in layered medium. J Eng Mech ASCE 104(3):643–661
Novak M, El Naggar MH, Sheta M, El Hifnawy L, El Marsafawi H, Ramadan O (1999) DYNA 5—a computer program for calculation of foundation response to dynamic loads. Geotechnical research centre. University of Western Ontario, London, Ontario
Novak M, Grigg RF (1976) Dynamic experiments with small pile foundations. Can Geotech J 13:372–385
Novak M, Mitwally H (1990) Random response of offshore towers with pile-soil-pile interaction. J Offshore Mech Arctic Eng 112:35–41
Novak M, Nogami T, Aboul-Ella F (1978) Dynamic soil reactions for plane strain case. J Eng Mech ASCE 104(4):953–959
Novak M, Sheta M (1980) Approximate approach to contact problems of piles. Proc dyn response of pile foundations analytical aspects M O’Neill et al. ASCE, New York, pp 53–79
Sinha SK, Biswas S, Manna B (2015) Nonlinear characteristics of floating piles under rotating machine induced vertical vibration. Geotech Geol Eng Springer 33:1031–1046
Vaziri H, Han Y (1992) Nonlinear vibration of pile groups under lateral loading. Can Geotech J 29:702–710
Funding
The authors have no relevant financial or non-financial interests to disclose.
Author information
Authors and Affiliations
Contributions
SK: Modeling, writing - original draft; SSC: Conceptualization, Investigation, Methodology writing; AB: Review & editing.
Corresponding author
Ethics declarations
Competing interests
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kumar, S., Choudhary, S.S. & Burman, A. Machine induced dynamic field responses of group pile with different pile arrangements. Geo-Engineering 15, 8 (2024). https://doi.org/10.1186/s40703-024-00207-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40703-024-00207-3