

Abstract
How far can a person sink downwards in quicksand? Experience would seem to suggest that there is low risk of submerging completely, but it is not easy to demonstrate this because of the complex rheology of granular suspensions. We study several mathematical models for the sinking of a vertical cylinder downwards into quicksand, finding that an approach with a buoyancy equation modified by drag force gives an unphysical answer. We instead argue that our proposed conclusion is supported by considering the dynamics of vibration-induced compactification of liquid-saturated granular suspensions. We compare quicksand with other non-Newtonian fluids, emphasising that in this case the same model does not apply and that the risk of drowning could be much more significant. We finish by suggesting some relevant experiments that can be performed in a classroom setting.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 4.0 licence. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
Mixtures of granular matter and liquid (known as granular suspensions) are ubiquitous in nature, with perhaps the most famous example being quicksand. The theoretical study of these mixtures is complicated in the case of general flow conditions [1, 2]. There is, however, a large body of literature which applies the relevant constitutive relations to the problem of granular segregation and size-segregating granular flows [3–6]. In this approach, the granular suspension is modelled as an ensemble of solid particles, with the effect of the interstitial gas being modelled by a term for the viscous drag force along with a stochastic Langevin-type term which is defined via the background temperature [7]. Some simple classroom experiments have been proposed in the literature which bypass these subtleties and demonstrate the main properties of suspensions of solid particles in fluids [8, 9]. In this article, we ask what depth a person would reach in quicksand (or some other dense granular suspension) if allowed to sink without outside interference. This question is pedagogically interesting, since it motivates students to consider granular suspensions in a context which could have obvious real-world consequences. Due to the complexity of the physics, there are very few analytic solutions for a solid sinking into a non-Newtonian suspension [10]. van den Wildenberg et al used an ultrasonic probe to track the motion of a steel ball sinking into a dense glass bead packing saturated with water, finding that sinking can be induced by horizontal vibrations of the bead packing [6, 7]. It also been established in various works that a ball can stop sinking at a certain depth due to jamming of the particles in the suspension, which depends on the packing density of the particles, the confining pressure, and the shear stress applied by the solid body [11–14].
Nevertheless, although there is a theoretical criterion for maximal submergence, the treatment is quite involved and uses the concepts of yield stress and effective viscosity. One can also consider a balance of forces argument, but the frictional force due to the suspension can only be specified by knowing its frictional rheology [15, 16]. Besides this, the arguments also consider submergence of a sphere with uniform density, so they do not necessarily shed that much light on our classroom question of how far a person could be expected to sink. Since we are here only concerned with estimates, we will make some simplifying assumptions which allow the problem to be solved for a variety of suspensions, allowing for comparisons in a classroom environment. Finally, we should mention that the property of being quicksand does not necessarily depend on using a granular suspension. Lohse et al showed than one can have 'dry' quicksand by reducing the packing density down from around 60% to 41% and Henann and Kamrin showed that one can have 'dynamic' quicksand, where changes in rheology can be induced by motion at a distance [17, 18]. We will not discuss these possibilities here and will only consider suspensions.
In section 2, we study the question of submergence depth of a person by considering a mathematical model of a sphere falling through a dense granular suspension and making the appropriate modification for a person modelled as a falling upright cylinder. Some assumptions are made to avoid the complexity of the underlying mathematical discussion and concentrate on the main physical principles. The answer obtained in this case is unphysical, leading us to argue that this model is insufficient and that one needs to consider specific properties of granular suspensions. This is done in section 3, where we consider vibration-induced compaction of granular suspensions, arguing that the compacticity of a column of granular suspension essentially implies that a person cannot sink all the way down into the suspension. In section 3, we consider other types of non-Newtonian fluid with different properties to quicksand and emphasise that these fluids may pose a much greater danger. We also discuss possible classroom experiments and further lines of investigation are suggested. We finish with conclusions in section 5.
2. Submergence depth of a person in quicksand
We begin by writing down the balance of forces on a falling sphere (shown in figure 1) [11]. This is the sum of the weight, the buoyancy force, and the frictional force due to the suspension:

where m = (4/3)π R3 ρb , ρb is the mass density of the ball, ρsus is the density of the suspension, and Δρ1 = ρb − ρsus. The frictional force splits into two parts (the threshold force and the drag force), so this equation is written completely as [11]

where Cd is the drag coefficient, Δρ2 = ρp − ρf , ρp is the mass density of the granular material, ρf is the mass density of the liquid, and μ0 is the static friction coefficient. We will not worry about the exact derivation of this equation and emphasise that the problem can be studied quite easily once we know the form of the forces in the force balance equation.
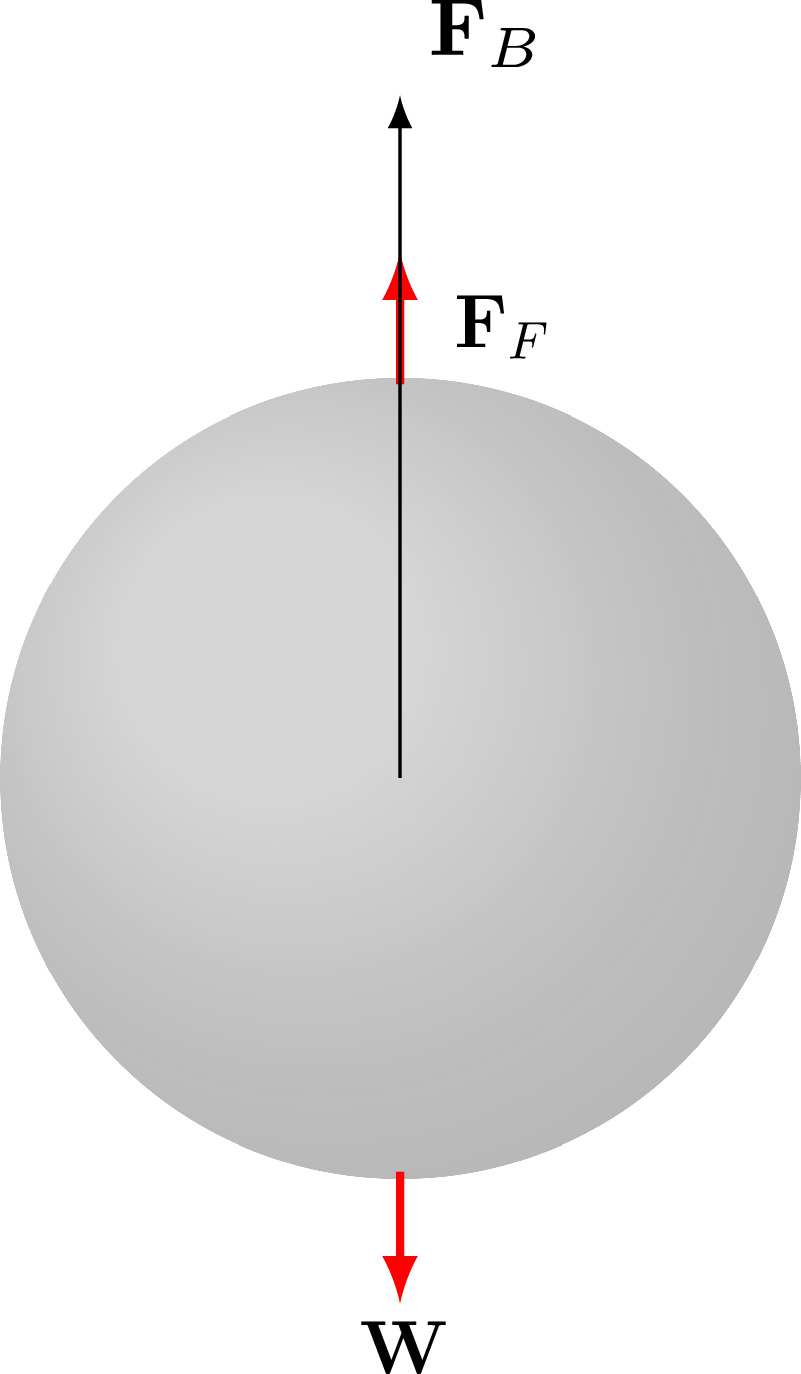
Figure 1. Balance of forces on a ball falling through a dense granular suspension, where the z-axis points downwards. FB denotes the buoyancy, FF denotes the frictional force due to the suspension, and W denotes the weight.
Download figure:
Standard image High-resolution image{kind=link}
We are interested in the point where the body has ceased moving, so we can simplify by setting dz/dt to zero, which gives us

To modify this equation to our case, we first need to replace the falling sphere with a falling cylinder. In our circumstances, we do not need detailed mathematical modelling, so it should be sufficient to consider an upright person moving downwards as a cylinder. This gives us

where h is the height of the cylinder. (Technically, the pre-factor multiplying the right-hand side should be slightly different when dealing with a cylinder instead of a sphere, but again, for the purposes of simplicity we will avoid this part of the derivation and keep this term the same.) A more difficult issue which needs to be dealt with is that different parts of a human body have different densities. For example, it is often argued that a person typically sinks into quicksand beyond their waist because the legs are slightly less dense than the torso. Since static equilibrium occurs when the displaced mass is equal to the mass of the object, the stopping depth must be somewhat higher than the waist. However, as we have stated above, the picture is much more complicated than only having weight plus buoyancy, so we think that this is a misleading argument and that the real reason why a person usually sinks past their waist involves a number of factors besides buoyancy. For this reason, we will argue that that to a first approximation, the upright body can be modelled as a single cylinder with a homogeneous density, which we will take to be 1010 kg m−3 (just slightly higher than the density of water, which is 1000 kg m−3). At a higher order, one could consider a pair of connected cylinders, where the bottom cylinder has a slightly lower density than the top one.
Specifying the static friction coefficient μ0 requires knowledge of the rheology of the specific granular suspension being considered. Since the static friction coefficient for a glass bead packing is of order 1 and sand particles would be expected to exhibit much less inter-particle friction, we will for our purposes assume that in the worst case μ0 is of order 0.3. We will further assume based on typical human bodies that h = 1.8 m. The density of the suspension ρsus is equal to pp ρp + pf ρf , where pp is the packing fraction of the granular particles and pf is the packing fraction for the liquid particles. What should the packing fraction be for the granular particles? The closest possible packing of spheres in three-dimensional space is around 74% of the surrounding volume [19]. The granular particles in the suspension will not be packed as closely as this due to the presence of the fluid, so we will assume that the particles take up 63% of the available space (the percentage corresponding to a random packing of equal hard spheres). In reality, sand grains are not perfectly spherical, but if a sand grain has a set of three perpendicular axes placed at its centre, the ratio between the longest and the shortest axis is generally below 1.2, so this is a good assumption. This leaves us with

The saturating fluid in quicksand is water (which has a density of 1000 kg m−3 as already stated) and we will assume a typical mass density of 2300 kg m−3 for a granular particle. Re-arranging for z, we have

Note that the maximal submergence decreases when the static friction coefficient is larger and increases when the length of the cylinder is greater, but does not depend on the radius of the cylinder.
Inputting the values which we have stated into this expression, we arrive at a value of z* = −1.2 m. Something has gone wrong here, since one would expect the value of z to be positive. This suggests that this question cannot be answered using a generic buoyancy equation which would be valid for any fluid with a drag force and that one must consider the properties of granular suspensions more carefully.
3. Compaction of granular suspensions
A more promising candidate comes from the dynamics of vibration-induced compaction of granular suspensions [20]. In the work of [20], a column of granular suspension saturated with viscous fluid is subjected to sinusoidal vibrations of given amplitude and frequency along the z-axis. We could take these oscillations to be a very rough model of the struggling and moving of a person standing on top of quicksand and sinking downwards continuously. The granular particles are assumed to be spherical. A key assumption of these experiments is that the vibrations are of sufficiently low amplitude that grains stay in contact with their neighbours. This assumption could be strongly violated by a realistic struggling or digging motion, so any conclusions which we draw here must be treated with caution. The time-dependent compacity ϕ(t) is defined using the length of the column h(t) as follows:

where m is the mass of the column of granular suspension, ρ is the density of the granular particles, R is the radius of the container, and h is the length of the column. Experimental data of [kie] indicates that for long times t∞ and varying frequencies f, the compacity always stays somewhere below 0.625 as a maximum value. This roughly matches the percentage which we stated earlier for a random packing of equal hard spheres, so we will assume that this is the maximum value for the compacity which is achieved regardless of the time for compression and assuming a sufficiently low frequency:

At this value for the compaction, we argue that the person will stop sinking downwards, since the column which they are pushing on cannot be shortened further. We next need a value for R. We will assume that the person is stood with feet shoulder width apart such that their feet act approximately like a disk pushing down with radius R = 0.15 m. Substituting this in with the value for ϕ∞, we obtain

Finally, what will the length of the column be? Most patches of quicksand in Nature are only a few feet deep. We will assume that the depth of the quicksand is at most 2 m and that for safety, the person should sink at most 1 m into the quicksand so that there is no danger of their arms getting caught up, compressing the column down to at most 1 m in length. This gives us the following relation:

This condition is expected to hold unless the sand particles are extremely light, in agreement with our intuitive expectation that a person will not sink down an appreciable distance into quicksand unless the person is much denser than the granular particles.
4. Discussion
We have studied the case of an upright cylinder sinking into quicksand and used a mathematical model of compacted granular suspensions to argue that a person of average height would likely never sink down beyond a fraction of their body length. Students might now breathe a sigh of relief knowing that a person almost certainly cannot drown in quicksand, but we need to be a bit more careful. It is sometimes mistakenly stated that there is no danger of drowning in non-Newtonian fluids, which is highly misleading. We have emphasised above that the balance of forces is delicate and as mentioned in the introduction, there might be other types of quicksand or other non-Newtonian fluids which could be much more dangerous. An example is the peat bog, which behaves much like quicksand but poses a much greater risk of drowning to people that try to walk through them, being composed of water and organic material [21]. It is not clear whether people are talking about a non-Newtonian fluid or a liquid-saturated granular suspension when they normally talk about quicksand (we have emphasised that we only mean the latter in this article, and that our conclusions do not say anything about the former). What is typically called 'quicksand' is often a related substance known as 'ooblek', which is a non-Newtonian liquid and has a 'slimy' behaviour [22]. We should also point out that some granular flows like landslides can be modelled both as Newtonian or non-Newtonian mass flows [23].
The danger of drowning from non-Newtonian liquids is somewhat different. In this case one submerges into the liquid as usual but for a shear-thickening fluid, the viscosity increases when a person moves their limb to move closer to safety. If the viscosity increases sharply, it could be possible for the person to become exhausted faster than normal. Nevertheless, this type of behaviour is only specific to a certain class of non-Newtonian fluids. Sand in water would be a non-Newtonian fluid but it would be shear-thinning (local viscosity at a point appears to decrease with increased stress). In this case, the above danger would not be present. It may be possible for students to create their own ooblek using water and cornstarch, which is cheaply available. Making the ooblek is not necessarily a trivial task, so it may be better for the instructor to practice a few times. The overall aim is to mix cornstarch with water at an approximate ratio of two to one. The ooblek is then tested to see if it flows like a liquid, but can still be squeezed and formed into a ball. Submerging in a liquid of this type in Nature would be different to submerging in a granular suspension and could pose a more significant danger.
One experiment which we could suggest is to compare the behaviour of the ooblek with a different liquid which is shear-thinning and consider trying to escape from both fluids. The expected outcome of this experiment would be to communicate to students that there are different classes of non-Newtonian fluid and that both could be found in Nature. At the same time, students could also study fluids with different properties and compare the buoyancy/weight balance in fluids with the much more complicated relation for granular suspensions. An example might be to compare submergence in regular water with submergence in aerated water. This latter type of water may be found at the bottom of a waterfall and is particularly dangerous due to its decreased density, apart from any down-currents which might exist. For this experiment, students could study samples of varying density and then use a cylindrical fishing float to test whether the buoyance force is affected by altering the density.
5. Conclusions
In this article, we asked how a far a person can sink downwards when stood in quicksand. If the answer is only a fraction of a person's height, they should be safe from drowning in all circumstances. Intuition and experience seem to tell us that an upright person would probably not sink all the way down into quicksand, but is this an obvious conclusion? The analysis is complicated somewhat by the fact that quicksand is typically not well defined in the literature, with some authors referring to quicksand when they really mean something more specific [24]. We questioned this assumption by studying the balance of forces for an upright cylinder moving downwards but obtained an unphysical answer. For this reason, we instead turned to the theory of vibration-induced compaction of a column of liquid-saturated granular suspension, arguing that a maximum compacity for such a column generally implies that a person standing on top of the suspension would not sink all the way to the bottom (unless perhaps the density of the sand grains was peculiarly light). We also emphasised that although quicksand might be relatively safe, our simple mathematical argument does not apply for non-Newtonian fluids and other fluids (like peat in peat bogs) could provide a very significant danger (a conclusion which is backed up from experience). We also neglected some key aspects of the problem, such as the tendency of a person to struggle back and forth. How could this be modelled in an experiment? One possibility might be to have a sphere attached to a rod and have the rod pivot back and forth sinusoidally to see to what extent a struggling person can dig themselves down further into the suspension. It has been shown before in the literature that a digging motion can cause a body to move much further down in a granular suspension then they would if they remained relatively still, which could again cause a genuine danger of drowning for a human [25].
Similarly, it was assumed that any vibrations and shaking motion would have an amplitude sufficiently low that a granular particle would never be moved away from its neighbouring particles. This assumption is perhaps questionable. In reality, the amplitude associated to a shaking motion of a person trying to free themselves would probably shift grain particles away from their neighbours, removing the simple scenario where all the grains are pressed downwards in a column below the sinking person until the length of the column cannot be reduced further. We also neglected the complex geometry of a human by modelling them as a cylinder, but variations in human body density should not have an impact on the conclusion reached in section 3, since we were only considering the maximum possible compaction of the sand grains in the suspension. Finally, a key assumption of the theory which we used to argue that one cannot sink is that the granular particles are fairly big (particle sizes larger than a few hundred micron). Real-life quicksand is often taken to be composed of very fine sand and clay particles, so students could explore the implications of using extremely fine grains on the conclusions of this article. Is there a transition point where one is working with a non-Newtonian fluid, rather than a liquid-saturated granular suspension?
Data availability statement
No new data were created or analysed in this study.