1. Introduction
Deepwater offshore oil production activities have been performed mainly by floating production systems (FPS) such as ship-shaped Floating Production, Storage, and Offloading (FPSOs) vessels. They offer a relatively cost-effective and fast solution with high storage capacity so that they can operate in remote fields. For instance, in Brazilian offshore pre-salt areas, this type of vessel has been installed at an average depth of 2000 m and 300 km from the coast [
1].
In FPSs, slender structures such as risers, umbilicals, and mooring lines connect the bottom of the sea to the platform, configuring the typical deepwater offshore scenario for oil and gas exploitation. These structures are designed considering 10-year and 100-year extreme environmental conditions of wave, wind, and current and their directional distributions. Besides extreme conditions, typical operational scenarios must also be addressed due to structural fatigue concerns.
The first decision in FPSO deployment usually is to choose between a “spread mooring” system, where an array of mooring lines distributed along the vessel hull restrains its rotation (nowadays, generally associated with a riser balcony), and a “turret mooring” system that allows the vessel to weathervane according to prevailing waves, winds, and currents, effectively reducing overall mooring forces. The spread mooring configuration costs are usually lower than those related to turret moorings; also, spread moorings are typically best suited to locations in West Africa and Brazil [
2] due to the predominance of a current direction during the year.
Regarding the risers that convey the oil and gas production to an FPSO, selecting the best configuration for deepwater is also heavily influenced by the geographical location and the prevailing weather conditions, considering the environmental challenges that each region presents. Still, the main objective is ensuring optimal system performance and reliability. Usually, the free-hanging flexible riser shown in
Figure 1 has been the preferred choice in moderate offshore environments typical of Brazilian scenarios.
Despite their relatively higher cost, flexible risers are considered a suitable solution in those scenarios compared to steel (rigid) risers because they are somewhat simpler to transport and install. In addition, their complex, multilayered structure ensures low bending stiffness, high compliance, and high resistance to torsion, tension, and internal and external pressures. The mechanical characteristics of a flexible pipe are guaranteed by a set of metallic and polymeric layers, as shown in
Figure 2: an inner carcass to prevent internal collapse, a pressure armor, and two or four layers of helical wires, named tensile armors, that are counter-wound. The polymeric layers, in turn, minimize friction between the metallic layers, prevent seawater ingress and internal fluid leakage, and insulate the pipe [
3].
Generally, riser analysis comprises two analysis types. The first is the global analysis, which involves modeling the entire length of the pipe (as shown in
Figure 1), typically with three-dimensional beam finite elements, to obtain the loads acting in its cross-sections. The second is the local analysis, which evaluates the stresses induced in each layer considering the loads calculated in the global analyses.
In deepwater scenarios, the top section of the riser is subjected to high tensile loads, which combine with significant bending moments. Moreover, the contact region with the seabed touchdown zone (TDZ) experiences high hydrostatic pressures associated with bending moments. Altogether, this scenario is highly favorable to fatigue failure that may be aggravated by stress corrosion cracking (SCC) [
6]. Indeed, the performance of flexible risers in the offshore fatigue context is not a recent concern [
7,
8,
9]; codes, standards, and a set of theoretical studies have been developed to establish the best practices for flexible risers analysis [
3,
10,
11]. The main difficulties consist of knowing their design limits and, more importantly, determining the loads to which they would be subjected in service.
In this context, the numerical simulation of such systems employing FE-based methods is an essential tool for their design. Particular attention should be dedicated to the nonlinear dynamic interactions between the vessel and the lines connected to it. Traditionally, on shallower waters, global analyses using uncoupled models, where the vessel and the lines are analyzed separately, provided good approximations for efforts and displacements. However, in deepwater scenarios, the effects of the elastic, damping, and inertial forces of the risers and mooring lines begin to interfere with the vessel response, indicating that coupled analysis would be required [
12]. Moreover, variations in damping ratio and mass coefficients concerning vessel motion were reported across distinct coupling levels. The concern with such nonlinear dynamic interactions began when [
13] observed that for TLPs (tension leg platforms), the higher the water depth, the greater the influence of the nonlinear behavior of the tendons on the vessel. This study already noted that the motions of each system element (platform, mooring tendons, and production lines) could not be considered independently. Further on [
12], the behavior of a platform with turret-type mooring for different water depths was studied, including a deepwater scenario (2000 m). The uncoupled analysis of these vessels proved inaccurate when calculating the vessel offsets for low-frequency wave motions and tension on lines.
Innovative approaches to riser and mooring analysis methodologies, encompassing different levels of design integration, have been investigated in [
14] where an accurate semi-coupled approach was presented that offered good results when considering a full nonlinear static coupled analysis to find the mean equilibrium position of the FPS, which was then used to calculate the new degrees of freedom of the vessel. After that, dynamic analyses were performed.
The present work proposes to take the next step towards a coupled dynamic analysis methodology, initiated by [
15,
16], but this time focusing on the fatigue context. Special attention is dedicated to applications on deepwater and ultra-deepwater scenarios involving FPSOs with numerous mooring lines and risers featuring a riser balcony on one side. For such applications, ref. [
15] highlighted the substantial influence of nonlinear stiffness, inertia, and particularly damping effects from the lines on the hull dynamic behavior. Those studies have shown that the motions of the top connections of the risers are influenced by the coupling of the lines to the hull, resulting in asymmetric responses of vertical displacement in these top connections and an asymmetric response of the roll motion. These responses are due to the high number of lines in the riser balcony and the ultra-deepwater context, which increases the structures’ self-weight and damping. Moreover, this coupling effect gains prominence since coupled roll motion RAOs (Response Amplitude Operators) generated through time-domain coupled analyses using FE software exhibit notably lower energy content and asymmetry, which cannot be observed in traditional uncoupled analysis. Thus, as the roll motion is critical for the fatigue effects in the lines, together with the heave motions and tension, this work investigates the influence of the coupling of the roll and heave motions on the fatigue life of flexible risers in such deepwater scenarios.
Another aspect addressed in this work is that, in general, coupled analysis studies have been conducted with a global approach, observing the hull behavior, global dynamic tensions, and moments on the lines. Now, having noted the asymmetric behavior of the FPSO with a riser balcony reported in the previous studies and considering the coupling of the hull with the mooring lines and risers, the objective here is to investigate the fatigue damage with local models that consider the different layers of the risers’ cross-section via coupled and uncoupled analyses. The goal is to demonstrate that the asymmetric behavior captured by the coupled analyses results in a different distribution of fatigue damage compared to the uncoupled methodology.
The remainder of this article is organized as follows. Initially,
Section 2 describes the classical uncoupled methodology for the global analysis of FPSs and then outlines the primary concepts of coupled methodologies.
Section 3 addresses the local analysis of flexible risers by revisiting a previously proposed approach to calculate fatigue damage in the tensile armors of these structures.
Section 4 states the methodology proposed in this study, and
Section 5 delineates the case study that illustrates the application of the coupled methodology for fatigue life calculation, taking an actual spread moored FPSO operating in a deepwater scenario. Finally,
Section 6 discusses the results obtained, and
Section 7 states the main conclusions of this study.
5. Case Studies
5.1. Introduction
The coupled and uncoupled methodologies described in the previous sections are employed to analyze an FPSO with a riser balcony, and the results obtained are compared. All global analyses are performed with the SITUA-Prosim software [
16], incorporating the formulations described in
Section 2.4. Local fatigue analysis is performed using the FADFLEX
® v. 2.0 [
4] software.
5.2. Model Description
The FPSO model (
Figure 8) has a riser balcony on the portside with a set of flexible risers and connected mooring lines located at a water depth of 1000 m. The ship is considered in an intermediate draft position (14.3 m), the most common for operation. The vessel heading is shown in
Figure 8. The hull properties are presented in
Table 1. The system comprises 88 catenary risers with different mechanical properties (23 production risers, 22 gas lift risers, 9 water injection risers, and 34 control umbilicals) and 18 mooring lines on a spread mooring configuration. All risers are modeled based on their content in an operational context. The top angle of all risers equals 7° relative to the vertical axis. A flexible production riser close to the bow position is chosen to be studied, and complete fatigue analysis is performed, comparing the results from coupled and uncoupled models. The riser fairlead position is 112.9 m and 29.3 m from the longitudinal and transversal hull axes, respectively, with the origin positioned in the hull midsections. The mooring lines are formed by chain and polyester segments, as described in
Table 2 and
Table 3.
To rebalance the coupled FPSO system, after including the lines, the vessel’s center of gravity must be shifted from the centerline to compensate for the static inclinations that occur due to the portside position of the risers—just as it would have been achieved using ballast in actual operations. The new center of gravity for coupled models is shifted from (0.00, 0.00) m without lines to (0.00, −0.45) m with lines to minimize trim and tilt. The buoyancy center is located on (0.90, 0.00) m.
The riser balcony is positioned from (−17.8, 29,5) m to (150.5, 29.5) m. The dots in
Figure 6a illustrate the position of the riser balcony. Risers closer to the extremities of the vessel generally face harsher efforts when considering wave loads. Hence, the coupling effects on the motions of the top of a riser will be better observed by selecting a riser close to the bow of the vessel (112.9, 29.5) m. The arrows X and Y indicate the direction of the vessel’s global axis. The red arrow illustrates the position of the riser under study on the riser balcony.
The flexible riser under study is an unbonded production 9″ (0.1524 mm) structure with 11 layers, including two tensile armors. The internal and external tensile armor layers have 59 and 64 wires, respectively, with lay angles of 30° and 32°. All armors have approximately rectangular cross-sections with 4 mm in height and 8 mm in width.
The axial stiffness of the pipe is 428 MNm/m, and its full slip bending stiffness equals 15.6 kNm2. A bending stiffener is positioned at the connection with the FPSO. This stiffener prevents the excessive bending of the pipe in the top region.
For fatigue calculation, the following assumptions are considered:
The annulus of the pipe is considered dry;
A friction coefficient of 0.15 between the layers of the pipe is initially considered;
The Gerber correction factor accounts for the mean stress effects;
All tensile armors had their fatigue lives calculated.
The
S-N curve employed is bilinear, as presented in Equation (30), where
is the number of cycles of fatigue and
is the stress range.
5.3. Environmental Loadings
In this case study, only wave loads are considered without the corresponding slow drift offset. Loads due to current and winds are disregarded. This hypothesis might bring a conservative result for fatigue cases once the damage is accumulated on the same spot of the riser; however, this assumption is adequate here since the goal is merely to compare results from uncoupled and coupled analyses, not to design the system. Also, the hydrodynamic drag on the ship is disregarded since the focus is to investigate the lines’ behavior.
For fatigue analysis, a typical set of loading cases from Campos Basin is chosen for simulation in the time domain with a 400 s signal of regular sea until stabilization. The comparison of loading time history will be extrapolated from the last 200 s of the wave signal. Load cases consider regular waves with increasing height (1 m to 10 m) combined with periods from 2 s to 26 s. For example, for the South direction, load case 01 corresponds to a wave height of 1 m with a period of 2 s, load case 02 corresponds to a wave height and period of 1 m and 4 s, and so on. However, not all wave heights and periods are contemplated since they do not occur, or their occurrence frequency is insignificant. Hence, they do not appear on the scatter diagram. Altogether, the load cases (LC) are grouped in the following directions: N, LC01 to LC38; NE, LC39 to LC84; E, LC85 to LC 139; SE, LC140 to LC209; SW, LC288 to LC368; W, LC369 to LC 390; and NW, LC391 to LC406.
7. Conclusions
This work proposed an FE numerical simulation methodology for applications in deepwater offshore oil and gas production scenarios with floating platforms (FPSO) featuring a riser balcony on one side. An overview of uncoupled and coupled global and local analysis methods to evaluate fatigue damage in flexible risers was presented, stressing the increased accuracy of the coupling method compared to the uncoupling one due to the many simplifications that the latter method involves. The accuracy and efficiency of the WkC coupling formulation employed in this work have already been demonstrated in several previous works [
16]. Moreover, the validity of the local model has been verified by comparing its predictions to those from experimental tests and other theoretical models [
4,
33].
Since coupled analyses considering all lines and using sufficiently refined FE meshes require considerable computational cost, this work proposed developing hybrid coupled methodologies to reduce computational costs. This aspect is even more crucial for designing floating platforms considering fatigue behavior since load case matrices with many environmental combinations shall be considered. The balance between accuracy and computational cost is delicate, as the consequences of riser failure can be severe, and guidelines and standards are still being settled down in this area; thus, the methodology proposed here aims to provide more accuracy on deepwater fatigue life calculation while maintaining feasible computational requirements.
The fundamental aspect of the proposed methodology is replacing the hull’s original RAOs with “coupled” RAOs. These RAOs may be used to investigate fatigue damage and extreme conditions for critical risers. The coupled RAOs would also allow less expensive irregular wave analyses, which are widely used and essential in riser design projects.
Another critical aspect of the methodology proposed here is the focus on the most important motions for the fatigue analysis of floating platforms featuring a riser balcony on one side and thus presenting an asymmetric behavior: heave (vertical translation of the vessel) and roll (rotation along the stern–bow axis). In this context, the “coupled RAO” methodology provided vertical displacements and accelerations at the top of the flexible riser that are substantially different from those obtained by the traditional and less accurate uncoupled methodology.
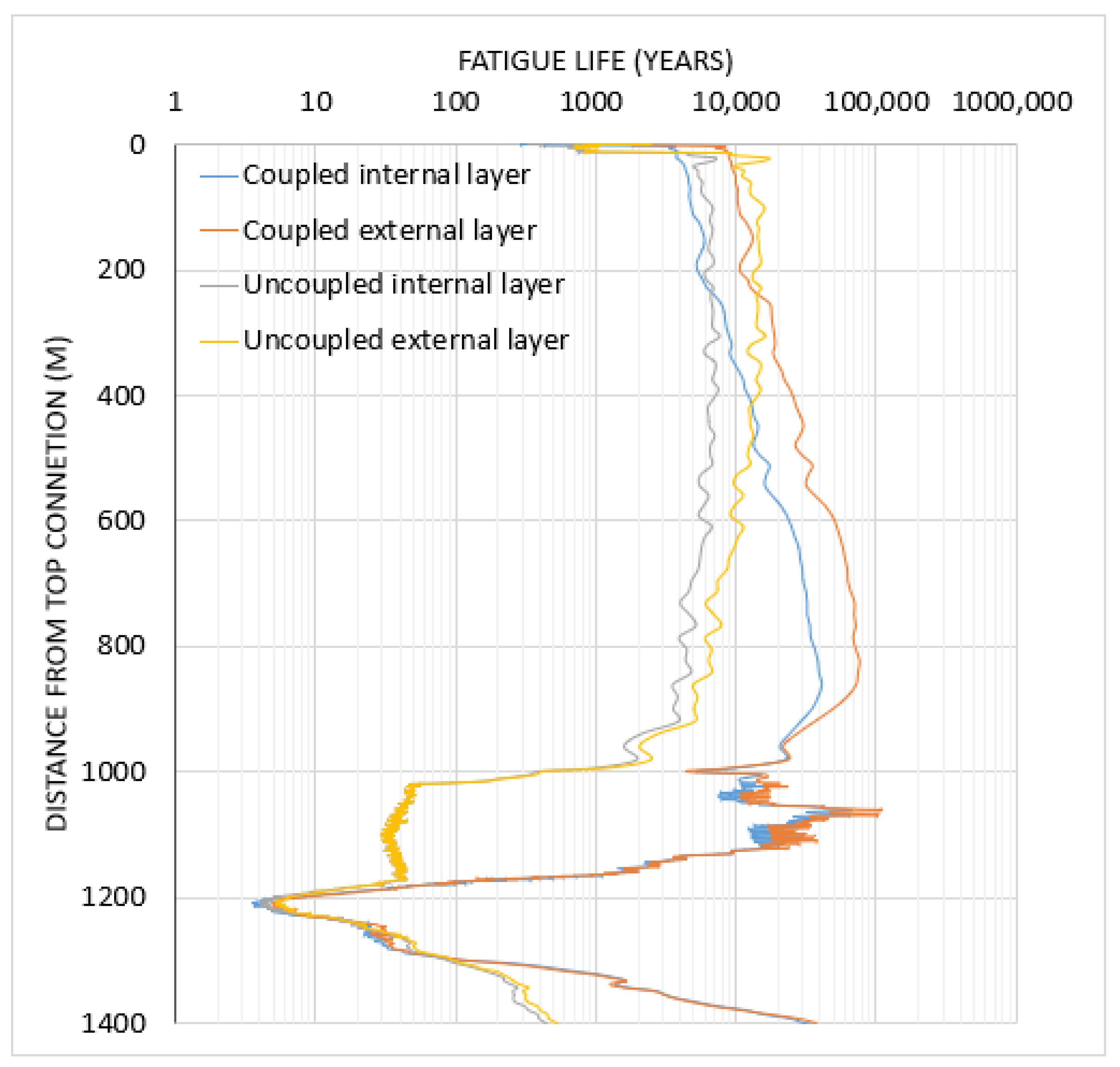
These results bring a new look at fatigue life calculation for such practical applications with asymmetric behavior. They show that the distribution of fatigue life along the riser section may influence the failure sequence of the tensile armors. The risers’ asymmetric distribution may reduce or increase fatigue life compared to symmetric situations and redistribute the fatigue damage on the tensile armors. In the internal tensile armor layers, as shown in the case study, coupled analyses may even present lower fatigue life when compared to the uncoupled results.
Besides the increased accuracy, another advantage of the proposed methodology is the reduction of computing time requirements, which can be 90% lower for irregular analyses than the coupled methodology. In summary, the “coupled RAO” methodology shares the high accuracy provided by the coupled methodology, with considerably lower computational costs for situations with many loading cases.
Finally, it is essential to note that this study builds upon global and local numerical models that have been verified in prior works, thus ensuring the robustness required for their application in the practical design of flexible pipes. Nevertheless, the authors acknowledge the necessity of validating the entire fatigue approach, which can only be accomplished through expensive experimental tests or in-field measurements that are presently unavailable. Consequently, further investigations are needed to thoroughly assess the accuracy of the proposed methodology.

 and
and 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}