当前位置:
X-MOL 学术
›
J. Comput. Syst. Sci. Int.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Application of Geometric Wireframe Models to Control the Berthing of Space Objects
Journal of Computer and Systems Sciences International ( IF 0.6 ) Pub Date : 2022-12-10 , DOI: 10.1134/s1064230722060090 Yu. F. Golubev , V. M. Mirkhaidarov , A. V. Yaskevich
中文翻译:

几何线框模型在空间物体靠泊控制中的应用
更新日期:2022-12-11
Journal of Computer and Systems Sciences International ( IF 0.6 ) Pub Date : 2022-12-10 , DOI: 10.1134/s1064230722060090 Yu. F. Golubev , V. M. Mirkhaidarov , A. V. Yaskevich
|
Abstract
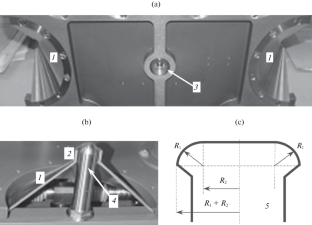
The results of real-time assessment of the dynamics of connection by a space object manipulator using small-sized docking devices are described. Due to the limited visibility of these devices, with the help of cameras, geometric wireframe models are additionally used to display their relative position and contact interaction. They facilitate the control procedure for the manipulator operator.
中文翻译:
几何线框模型在空间物体靠泊控制中的应用
摘要
描述了使用小型对接装置对空间物体操纵器连接动力学进行实时评估的结果。由于这些设备的可见性有限,在相机的帮助下,几何线框模型被额外用于显示它们的相对位置和接触交互。它们有助于机械手操作员的控制程序。


























 京公网安备 11010802027423号
京公网安备 11010802027423号