Experimental Techniques ( IF 1.6 ) Pub Date : 2023-06-21 , DOI: 10.1007/s40799-023-00646-0 G. Čepon , D. Ocepek , M. Kodrič , M. Demšar , T. Bregar , M. Boltežar
|
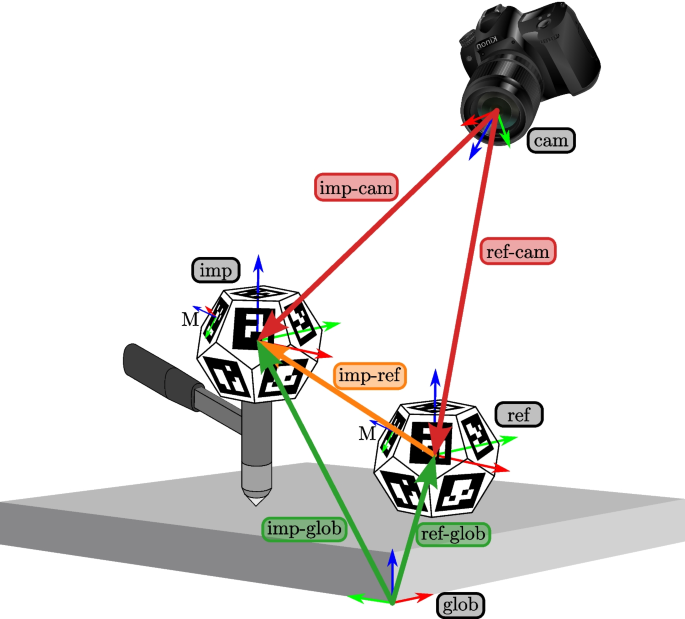
In structural dynamics a structure’s dynamic properties are often determined from its frequency-response functions (FRFs). Commonly, FRFs are determined by measuring a structure’s response while it is subjected to controlled excitation. Impact excitation performed by hand is a popular way to perform this step, as it enables rapid FRF acquisition for each individual excitation location. On the other hand, the precise location of impacts performed by hand is difficult to estimate and relies mainly on the experimentalist’s skills. Furthermore, deviations in the impact’s location and direction affect the FRFs across the entire frequency range. This paper proposes the use of ArUco markers for an impact-pose estimation for the use in FRF acquisition campaign. The approach relies on two dodecahedrons with markers on each face, one mounted on the impact hammer and another at a known location on the structure. An experimental setup with an analog trigger is suggested, recording an image at the exact time of the impact. A camera with a fixed aperture is used to capture the images, from which the impact pose is estimated in the structure’s coordinate system. Finally, a procedure to compensate for the location error is presented. This relies on the linear dependency of the FRFs in relation to the impact offset.
中文翻译:
在结构动力学中使用 ArUco 标记进行碰撞位姿估计
在结构动力学中,结构的动态特性通常由其频率响应函数 (FRF) 确定。通常,频响函数是通过测量结构受到受控激励时的响应来确定的。手动执行冲击激励是执行此步骤的常用方法,因为它可以快速采集每个单独激励位置的 FRF。另一方面,手动撞击的精确位置很难估计,主要依赖于实验人员的技能。此外,撞击位置和方向的偏差会影响整个频率范围内的频响函数。本文建议使用 ArUco 标记进行撞击姿态估计,以用于 FRF 采集活动。该方法依赖于两个十二面体,每个面上都有标记,一个安装在冲击锤上,另一个安装在结构上的已知位置。建议使用模拟触发器进行实验设置,在撞击的确切时间记录图像。使用具有固定光圈的相机来捕获图像,并根据图像在结构的坐标系中估计碰撞姿态。最后,提出了补偿定位误差的程序。这依赖于频响函数与冲击偏移的线性相关性。提出了补偿位置误差的程序。这依赖于频响函数与冲击偏移的线性相关性。提出了补偿位置误差的程序。这依赖于频响函数与冲击偏移的线性相关性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号