Automation and Remote Control ( IF 0.7 ) Pub Date : 2023-10-01 , DOI: 10.1134/s0005117923060097 V. F. Sokolov
|
Abstract
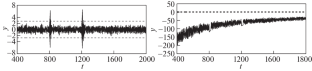
In this paper, the problem of suboptimal stabilization of an object with discrete time, output and control uncertainties, and bounded external perturbation is considered. The autoregressive nominal model coefficients, uncertainty amplification coefficients, norm and external disturbance offset are assumed to be unknown. The quality indicator is the worst-case asymptotic upper bound of the output modulus of the object. The solution of the problem in conditions of non-identifiability of all unknown parameters is based on the method of recurrent target inequalities and optimal online estimation, in which the quality index of the control problem serves as an identification criterion. A non-linear replacement of the unknown parameter perturbations that reduces the optimal online estimation problem to a fractional linear programming problem is proposed. The performance of adaptive suboptimal control is illustrated by numerical simulation results.
中文翻译:
具有不确定性和偏移外部扰动的未知自回归对象的次优鲁棒稳定
摘要
本文考虑了具有离散时间、输出和控制不确定性以及有界外部扰动的对象的次优稳定问题。假设自回归名义模型系数、不确定性放大系数、范数和外部干扰偏移未知。质量指标是对象输出模量的最坏情况渐近上限。在所有未知参数不可辨识的情况下问题的求解基于循环目标不等式和最优在线估计的方法,其中控制问题的质量指标作为辨识准则。提出了未知参数扰动的非线性替换,将最优在线估计问题简化为分数线性规划问题。


























 京公网安备 11010802027423号
京公网安备 11010802027423号