当前位置:
X-MOL 学术
›
J. Mar. Sci. Technol.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Modelling and high-gain adaptive control of chaotic yawing of ship under wave disturbance
Journal of Marine Science and Technology ( IF 2.6 ) Pub Date : 2023-11-06 , DOI: 10.1007/s00773-023-00970-5 Xu Han , Xianku Zhang
中文翻译:

波浪扰动下船舶混沌偏航建模与高增益自适应控制
更新日期:2023-11-06
Journal of Marine Science and Technology ( IF 2.6 ) Pub Date : 2023-11-06 , DOI: 10.1007/s00773-023-00970-5 Xu Han , Xianku Zhang
|
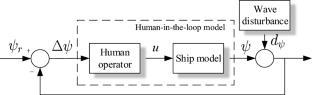
In order to describe and solve chaotic yawing in straight-line navigation, taking large tanker Davis Sea as an example, the yawing model and corresponding high-gain adaptive controller is established. Chaotic yawing is proved to exist. Mathematical analysis indicates the error of the controlled system is globally ultimately bounded. Simulation results show the proposed control law is effective and robust to model perturbation. Compared with sliding mode control, the accuracy of proposed method is 69.9% better and the control energy consumption is 32.6% smaller.
中文翻译:
波浪扰动下船舶混沌偏航建模与高增益自适应控制
为了描述和解决直线航行中的混沌偏航问题,以大型油轮Davis Sea为例,建立了偏航模型和相应的高增益自适应控制器。混沌偏航被证明存在。数学分析表明受控系统的误差最终是全局有界的。仿真结果表明,所提出的控制律是有效的并且对模型扰动具有鲁棒性。与滑模控制相比,该方法的精度提高了69.9%,控制能耗降低了32.6%。


























 京公网安备 11010802027423号
京公网安备 11010802027423号