GPS Solutions ( IF 4.9 ) Pub Date : 2023-11-25 , DOI: 10.1007/s10291-023-01574-7 Wei Gao , Xingqun Zhan , Rong Yang
|
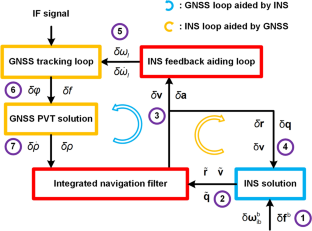
In the ultra-tight integration system of the global navigation satellite system/ inertial navigation system (GNSS/INS), the error models of INS aiding information are significant to analyze the performance of system. However, it is difficult to comprehensively describe the error propagation process between INS and GNSS when using the traditional transfer functions and inertial computation formulas. To overcome the issues, a comprehensive error modeling scheme of INS aiding information for GNSS tracking loops is proposed from the state space design perspective. Using the proper integrated navigation filter derived in Earth-centered, Earth-fixed frame, the error propagation process from integrated navigation filter to INS-aiding information can be constructed, by taking the overall error sources into consideration. In addition, the error item of acceleration caused by rotations of the line-of-sight direction is analyzed, which is especially important for high-dynamic receivers or middle-orbit satellites positioning. Simulation and experiment results verify the effectiveness of the proposed error modeling method. This method has significant application potential for the performance analysis of tracking loops in GNSS/INS ultra-tight integration system.
中文翻译:
GNSS/INS 超紧密集成中的 INS 辅助信息误差建模
在全球导航卫星系统/惯性导航系统(GNSS/INS)超紧密集成系统中,INS辅助信息的误差模型对于分析系统性能具有重要意义。然而,利用传统的传递函数和惯性计算公式很难全面描述INS和GNSS之间的误差传播过程。为了克服这些问题,从状态空间设计的角度提出了一种用于 GNSS 跟踪环的 INS 辅助信息的综合误差建模方案。使用在地心、地球固定框架中导出的适当的组合导航滤波器,通过考虑总体误差源,可以构建从组合导航滤波器到INS辅助信息的误差传播过程。此外,还分析了视线方向旋转引起的加速度误差项,这对于高动态接收机或中轨卫星定位尤为重要。仿真和实验结果验证了所提出的误差建模方法的有效性。该方法对于GNSS/INS超紧集成系统跟踪环路的性能分析具有重要的应用潜力。


























 京公网安备 11010802027423号
京公网安备 11010802027423号