International Journal of Intelligent Robotics and Applications Pub Date : 2024-02-10 , DOI: 10.1007/s41315-023-00315-w José de Jesús Rubio , Daniel Andres Cordova , Mario Alberto Hernandez , Eduardo Orozco , Francisco Javier Rosas , Guadalupe Juliana Gutierrez , Jesus Alberto Meda-Campaña , Carlos Aguilar-Ibañez
|
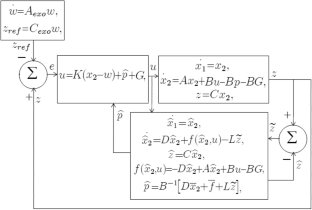
An exosystem needs to be nonlinear when it generates the perturbations to be reconstructed; however, an exosystem does not need to be nonlinear when it generates the references to be tracked. Resulting that the tracking of the references generated by an exosystem is an easier task. Hence, some studies on the references tracking should be made. Furthermore, to solve the references tracking, the perturbations are needed. In this research, the references tracking and the perturbations reconstruction in a Cartesian robot are discussed. For the perturbations reconstruction, an estimator is defined to force the reconstructed perturbations to track the perturbations of a Cartesian robot model. For the references tracking, a controller is defined to force a Cartesian robot model to track an exosystem. A theorem is addressed to prove the perturbations reconstruction. A theorem is addressed to prove the references tracking. A simulation in a Cartesian robot is used to confirm the validity and effectiveness of our controller with estimator in comparison with a feedback controller.
中文翻译:
笛卡尔机器人中的参考跟踪和扰动重建
当外系统产生要重建的扰动时,它需要是非线性的;然而,外系统在生成要跟踪的参考时不需要是非线性的。因此,跟踪外系统生成的引用是一项更容易的任务。因此,应该对参考跟踪进行一些研究。此外,为了解决参考跟踪问题,需要扰动。在本研究中,讨论了笛卡尔机器人中的参考跟踪和扰动重建。对于扰动重建,定义了一个估计器来强制重建的扰动跟踪笛卡尔机器人模型的扰动。对于参考跟踪,定义了一个控制器来强制笛卡尔机器人模型跟踪外系统。提出一个定理来证明扰动重建。提出了一个定理来证明参考跟踪。笛卡尔机器人中的模拟用于确认带有估计器的控制器与反馈控制器相比的有效性和有效性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号