Mechanics of Solids ( IF 0.7 ) Pub Date : 2024-02-11 , DOI: 10.3103/s0025654423070075 M. Z. Dosaev
|
Abstract
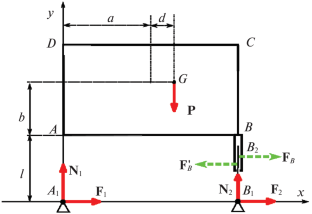
A flat body on hinged supports is considered. One of the supports is connected to the body by means of a sliding attachment. The flexibility of the support rods is modeled by a hinge with a helical spring of sufficient stiffness to prevent relative rotation. It is shown that the linearization of the equilibrium equations makes it impossible to estimate the equilibrium position. The equilibrium position is sought in the form of a series in terms of the reciprocal of the helical spring stiffness coefficient. It is shown that as the helical spring stiffness coefficient tends to infinity and the helical spring moment, which models the internal bending forces in the rods, tends to infinity. For the case of vertical equilibrium, an estimate is given of the tangential reaction in the support hinge, which occurs when additional loads are introduced and in the case of small oscillations. In all the cases considered, the reaction that occurs in the supports is much greater than the body’s weight.
中文翻译:
平面设计滑动垂直支撑的灵活性研究
摘要
考虑铰接支撑件上的扁平主体。其中一个支撑件通过滑动附件连接至主体。支撑杆的柔性通过铰链建模,该铰链具有足够刚度的螺旋弹簧以防止相对旋转。结果表明,平衡方程的线性化使得无法估计平衡位置。平衡位置以螺旋弹簧刚度系数倒数的级数形式寻求。结果表明,随着螺旋弹簧刚度系数趋于无穷大,模拟杆内弯曲力的螺旋弹簧力矩也趋于无穷大。对于垂直平衡的情况,给出了支撑铰链中的切向反作用力的估计,该反作用力在引入附加载荷和小振动的情况下发生。在所有考虑的情况下,支架中发生的反作用力远大于身体的重量。


























 京公网安备 11010802027423号
京公网安备 11010802027423号