Nature ( IF 64.8 ) Pub Date : 2024-03-20 , DOI: 10.1038/s41586-024-07097-6 Jonas Veenstra , Oleksandr Gamayun , Xiaofei Guo , Anahita Sarvi , Chris Ventura Meinersen , Corentin Coulais
|
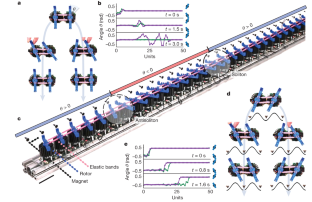
From protein motifs1 to black holes2, topological solitons are pervasive nonlinear excitations that are robust and can be driven by external fields3. So far, existing driving mechanisms all accelerate solitons and antisolitons in opposite directions3,4. Here we introduce a local driving mechanism for solitons that accelerates both solitons and antisolitons in the same direction instead: non-reciprocal driving. To realize this mechanism, we construct an active mechanical metamaterial consisting of non-reciprocally coupled oscillators5,6,7,8 subject to a bistable potential9,10,11,12,13,14. We find that such nonlinearity coaxes non-reciprocal excitations—so-called non-Hermitian skin waves5,6,7,8,15,16,17,18,19,20,21,22, which are typically unstable—into robust one-way (anti)solitons. We harness such non-reciprocal topological solitons by constructing an active waveguide capable of transmitting and filtering unidirectional information. Finally, we illustrate this mechanism in another class of metamaterials that shows the breaking of ‘supersymmetry’23,24 causing only antisolitons to be driven. Our observations and models demonstrate a subtle interplay between non-reciprocity and topological solitons, whereby solitons create their own driving force by locally straining the material. Beyond the scope of our study, non-reciprocal solitons might provide an efficient driving mechanism for robotic locomotion25 and could emerge in other settings, for example, quantum mechanics26,27, optics28,29,30 and soft matter31.
中文翻译:
活性超材料中的非互易拓扑孤子
从蛋白质基序1到黑洞2,拓扑孤子是普遍存在的非线性激励,其鲁棒性强且可由外部场驱动3。到目前为止,现有的驱动机制都是以相反的方向加速孤子和反孤子3,4。在这里,我们引入了一种孤子的局部驱动机制,它可以沿同一方向加速孤子和反孤子:非互易驱动。为了实现这种机制,我们构建了一种主动机械超材料,由非互易耦合振荡器5,6,7,8组成,受双稳态电位9,10,11,12,13,14 的影响。我们发现这种非线性将非互易激励(所谓的非厄米皮肤波5,6,7,8,15,16,17,18,19,20,21,22,通常不稳定)变成鲁棒的。单向(反)孤子。我们通过构建能够传输和过滤单向信息的有源波导来利用这种非互易拓扑孤子。最后,我们在另一类超材料中说明了这种机制,它显示了“超对称” 23,24的破缺,仅导致反孤子被驱动。我们的观察和模型证明了非互易性和拓扑孤子之间的微妙相互作用,孤子通过对材料进行局部应变来产生自己的驱动力。除了我们的研究范围之外,非互易孤子可能为机器人运动25提供有效的驱动机制,并且可能出现在其他环境中,例如量子力学26,27、光学28,29,30和软物质31。


























 京公网安备 11010802027423号
京公网安备 11010802027423号